Obvody ovládání stykače a ochrany motoru
 V závislosti na funkci, která má být provedena, existují různé řídicí obvody motoru stykače.
V závislosti na funkci, která má být provedena, existují různé řídicí obvody motoru stykače.
Obrázek 1a ukazuje kombinované schéma nevratného magnetického spouštěče... V něm se uspořádání prvků shoduje s uspořádáním v přírodě, to znamená, že všechny prvky umístěné ve startovacím boxu jsou seskupeny na levé straně schématu a tlačítkovou stanici s tlačítky «Start» a «Stop» zobrazeno na pravé straně diagramu.
Tlačítková stanice je obvykle umístěna v určité vzdálenosti od magnetický startér… Pro pochopení principu činnosti obvodu řízení motoru se obvykle používají podrobná (základní) schémata (obr. 1.b). Stisknutím spouštěcího tlačítka SB2 se uzavře obvod cívky stykače KM, který obsahuje tři kontakty KM napájecího obvodu motoru. V tomto případě se také sepne blokový kontakt KM zapojený paralelně se spouštěcím tlačítkem SB2. To vám umožní napájet cívku KM při uvolnění tlačítka SB2.
Motor se zastaví stisknutím tlačítka SB1, zatímco se cívka vypne a uvolní napájecí (hlavní) kontakty a pomocný kontakt. Po uvolnění tlačítka SB1 bude obvod cívky KM bez napětí. Pro restartování motoru stiskněte znovu tlačítko SB2.
Tento obvod také poskytuje tzv. nulovou ochranu, to znamená, že pokud síťové napětí zmizí nebo klesne na 50-60% jmenovitého, KM cívka neudrží silové kontakty KM a motor se vypne. Když se napětí objeví nebo se zvýší na hodnotu blízkou jmenovité hodnotě, magnetický startér se samovolně nezapne. Chcete-li jej zapnout, musíte znovu stisknout tlačítko start.
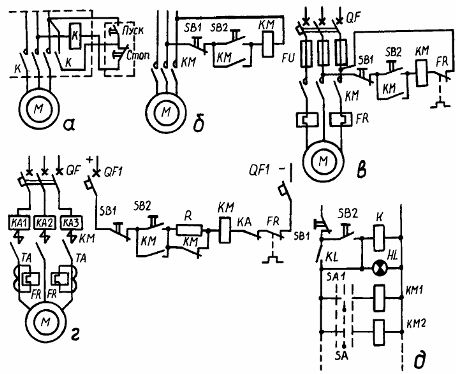
Rýže. 1. Schémata řízení a ochrany motoru: a — kombinované ab — podrobné schéma nevratného magnetického spouštěče; c — ochrana motoru pomocí pojistek a tepelných relé; d — schéma řídicí stanice výkonného motoru; d — nulová ochrana od mezilehlého relé
Ochrana motoru před přehřátím vinutí se provádí při dlouhodobém přetížení tepelná relé FR, a ochranu proti velkému přetížení nebo zkratu zajišťují pojistky FU popř jističe QF (obr. 1, c). K ochraně před dlouhodobým přetížením se používají dvě tepelná relé, protože s jedním relé bude v případě spálené pojistky v sérii, se kterou je zapojen topný článek tohoto relé, motor připojen k jednofázové síti a nebudou chráněni. Vypínací kontakty těchto relé jsou zapojeny do série s cívkou spouštěče. Když se jeden z nich otevře, cívka KM je bez napětí a motor se zastaví, jako když se stiskne tlačítko SB1.
Řídicí stanice motoru s vysokým výkonem je znázorněna na Obr. 1, d. Ochranu proti zkratu zajišťuje nadproudové relé KA1 — KA3, ochranu proti přetížení zajišťují tepelná relé FR připojená přes proudové transformátory. Cívka třípólového stykače je napájena stejnosměrným proudem. Pro snížení proudu v cívce stykače po jejím zařazení do obvodu je zaveden přídavný odpor R, který byl předtím zkratován otevřeným kontaktem KM.
V obvodech ručního ovládání s více ovladači, spínači nebo jinými zařízeními se k ochraně neutrálního vodiče používají mezilehlá relé. (obr. 1, e) Pro přivedení napětí do řídicího obvodu stiskněte tlačítko SB2, čímž se zapne mezirelé K, jehož součástí je jeho zapínací kontakt K a signálka HL, indikující přítomnost napětí v řídicím obvodu. . Po uvolnění tlačítka SB2 dojde k zablokování cívky relé, zatímco obvody ovladače SM1, přepínače paketů SM atd. a cívky stykačů KM1, KM2 atd. budou pod napětím.
V uvažovaných schématech jsou samosvorné kontakty nezbytné pro nepřetržitý provoz motorů. V praxi často motor potřebuje běžet pouze po stisknutí startovacího tlačítka, například u zvedacích strojů. V tomto případě není v řídicím obvodu žádné tlačítko Stop (obr. 2, a). Někdy je potřeba zajistit chod pohonu ve dvou režimech, to znamená zapnout jej na krátkou dobu při nastavování stroje nebo na dlouhou dobu. Poté krátkým stiskem tlačítka SB2 (obr. 2.b) sepne cívka stykače KM a sepne samosvorný kontakt KM, přičemž po uvolnění tlačítka SB2 motor běží. .
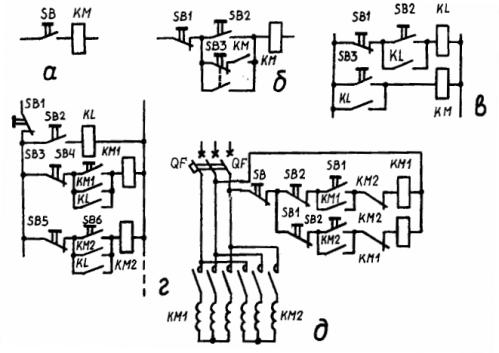
Rýže. 2. Typy řídicích obvodů pro asynchronní motory: a — v režimu jogging; b a c — při dlouhodobé práci a běhání; d – současné zapojení několika motorů; d — plynulý start dvourychlostního motoru
Pro režim řízení motoru stiskněte tlačítko SB3, jeho zapínací kontakt sepne cívku stykače KM a rozpínací kontakt přeruší samosvorný obvod stykače. Nevýhodou tohoto obvodu je, že otevřený kontakt tlačítka SB3 se může sepnout dříve, než se rozepne kontakt bloku KM a motor se nevypne. Obvod znázorněný na Obr. 2, f, je bez této vady.
Pro nepřetržitý provoz se stisknutím tlačítka SB2 zapne mezilehlé relé K. Jeden z kontaktů K zapne cívku stykače KM a druhý současně zablokuje tlačítko SB2, čímž se vypne chod motoru pomocí tlačítka start propuštěn. Chcete-li zahájit provoz, stiskněte tlačítko SB3 a podržte jej po požadovanou dobu.
Obrázek 2d ukazuje schéma pro spouštění více motorů současně z jednoho spouštěcího tlačítka pomocí mezilehlého relé ... Tlačítko SB2 zapíná relé K, jehož zapínací kontakty současně zapínají cívky stykačů KM1, KM2 atd. Obr. Zastavte všechny motory současně tlačítkem SB1. Chcete-li zapnout a vypnout každý motor samostatně, použijte tlačítka SB3, SB4 a SB5, SB6 atd.
Plynulý spouštěcí diagram dvourychlostního dvouvinutého motoru s rotorem nakrátko znázorněného na Obr. 2, e. Pro nastartování motoru na první rychlost se používá tlačítko SB1, na druhé - SB2.Obě tlačítka jsou mechanicky blokována, aby se zabránilo zařazení motoru do dvou rychlostí současně.
Obvody startéru jsou také elektricky blokovány. Takže když je například aktivována cívka KM1, rozpínací kontakt přeruší obvod cívky KM2, čímž je vyloučena možnost jejího zapojení. Chcete-li přepnout na druhou rychlost, musíte stisknout tlačítko SB2, zatímco obvod cívky KM1 je přerušen a vypne se. Cívka obvodu KM2 přijímá energii a zapíná motor na druhou rychlost.
Zpětné řízení asynchronních motorů se provádí pomocí dvou stykačů (obr. 3, a).
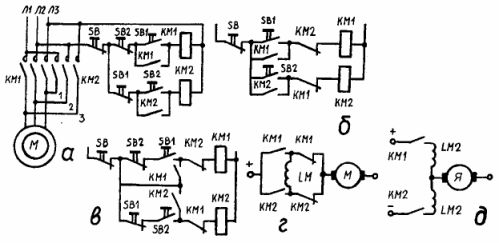
Obr. 3. Schémata ovládání motoru: a — reverzibilní magnetický startér s mechanickým blokováním; b — totéž s elektrickým blokováním; c — kombinace možností a a b; d a e — spouštění a reverzace stejnosměrných motorů s nízkým výkonem
Stykač KM1 se používá k zapojení motoru vpřed a KM2 se používá vzad. Aby se zabránilo náhodnému současnému sepnutí dvou stykačů, které vede ke zkratu, obvod využívá (viz obr. 3, a) vzájemné mechanické blokování se dvěma přerušovacími kontakty tlačítek SB1 a SB2. Stisknutím tlačítka SB1 zapněte obvod cívky KM1 a odpojte obvod cívky KM2.
Při současném stisknutí tlačítek SB1 a SB2 se přeruší obvody cívek KM1 a KM2 a žádný ze stykačů se nezapne. Blokování se provádí dvěma přerušovacími kontakty KM2 a KM1, které jsou součástí obvodů cívek KM1 a KM2 (obr. 3, b). Chcete-li obrátit motor v tomto schématu, musíte nejprve stisknout tlačítko SB.
Obvod na Obr. 3, c je kombinací dvou předchozích obvodů, to znamená, že je zde dvojité blokování.Tlačítko SBI zapne stykač KM1 a obvod cívky stykače KM2 se přeruší současným otevřeným kontaktem tlačítka SB1 a kontaktem bloku KM1.
Obrázek 3, dae ukazuje nejjednodušší schémata spouštění a reverzace sekvenčně buzených motorů s nízkým výkonem... Takové motory jsou připojeny k síti bez spouštěcích reostatů. Podle schématu na Obr. 3, d, spouštění a reverzace motoru se sériovým buzením se provádí pomocí dvou mezilehlých relé. Motor je reverzován obrácením směru proudu v LM budicí cívce. U motorů se dvěma sériovými budicími vinutími vytvářejícími magnetické toky v opačných směrech má spínací a reverzní obvod pouze dva kontaktní kontakty (viz obr. 3, e).
Jak je patrné z uvažovaných regulačních schémat, je nejjednodušší automatizovat proces spouštění a reverzace asynchronních motorů s rotorem nakrátko. V tomto případě je veškerá kontrola při spouštění omezena na připojení motoru k elektrické síti a při zastavení - na odpojení od sítě.
Složitější je automatizace spouštění, zastavování a zastavování indukčních motorů s fázovým vinutím rotoru, indukčních motorů s kotvou nakrátko se zvýšeným výkonem, stejnosměrných motorů středního a vysokého výkonu, vícerychlostních indukčních motorů se stupňovitým rozběhem a také jako synchronní motory. Tyto motory jsou ovládány jako funkce času, Rychlost a aktuální.
Kromě výše uvedených případů lze provést ovládání motoru a podle principu cesty, kdy motor naskočí a zpomalí, když pracovní těleso dosáhne určité polohy v prostoru.Systémy provádějící takové funkce se nazývají systémy s otevřenou smyčkou, protože nemají žádnou zpětnou vazbu mezi výstupní a vstupní hodnotou.