Obvody řízení motoru jako funkce času
 Tento typ řízení se používá, když veškeré spínání v elektrickém obvodu elektromotoru probíhá v určitých časových okamžicích, například při automatizaci procesu spouštění elektromotorů bez sledování rychlosti nebo proudu. Doba trvání intervalů je určena a lze ji upravit nastavením časového relé.
Tento typ řízení se používá, když veškeré spínání v elektrickém obvodu elektromotoru probíhá v určitých časových okamžicích, například při automatizaci procesu spouštění elektromotorů bez sledování rychlosti nebo proudu. Doba trvání intervalů je určena a lze ji upravit nastavením časového relé.
Časové řízení získalo největší rozšíření v průmyslu díky jednoduchosti a spolehlivosti sériově vyráběných elektromagnetických a elektronických časových relé.
Takže z obr. 1, a a b je vidět, že sepnutím kontaktu K síťového stykače je celý odpor reostatu zahrnut do obvodu kotvy, rovný R1 + R2 + R3, a zahrnutí počátečních odporových sekcí může nastat v určitých časových intervalech t1, t2 a t3 při určitých otáčkách motoru n1, n2, n3 a při poklesu zapínacího proudu na nastavenou hodnotu I2. Časové intervaly jsou voleny tak, aby při každém dalším zkratu odporu proud motoru nepřekročil přípustnou hodnotu I1.
Při zrychlování motoru z n = 0 na n1 se proud snižuje na I2 v důsledku zvýšení zadní elektromotorické síly. Po časovém intervalu t1 se sepne kontakt K1, bočníkový odpor R1, což vede ke snížení odporu reostatu na R2 + R3, novému zvýšení proudu na I1 atd. Na konci startu motor zrychlí na jmenovité otáčky, startovací reostat je zcela odstraněn.
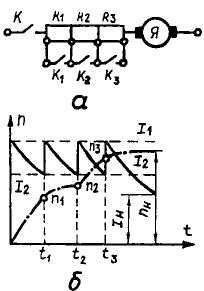
Rýže. 1. Obvody řízení motoru jako funkce času: a — spouštěcí reostat stejnosměrného motoru, b — spouštěcí schéma
Zvažte některé obvody řízení motoru jako funkci času.
Při časově závislém řízení asynchronního motoru s vinutým rotorem (obr. 2) zajišťují časovou prodlevu potřebnou ke zkratování jednotlivých kroků rozběhového reostatu kyvadlová časová relé, jejichž počet je roven počtu kroky. Schéma funguje následovně.
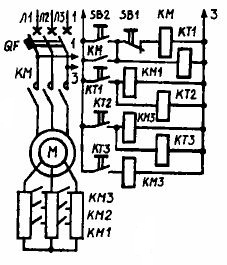
Rýže. 2. Řídicí obvod jako funkce času indukčního motoru s vinutým rotorem
Když kliknete na knoflík SB1 napájí cívku stykače na vedení KM, která připojuje stator motoru k síti. Současně je plně zaveden výstupní reostat. Spolu se stykačem se sepne časové relé KT1, které po určitém časovém intervalu sepne kontakt v obvodu cívky stykače KM1.
Stykač pracuje a uzavře první sekci reostatu, aby se spustil rotor. Současně sepne časové relé KT2, které se zpožděním sepne své kontakty a sepne cívku KM2 a časové relé KTZ. Kontakty stykače KM2 zkratují druhý stupeň KM2 spouštěcího reostatu.Kromě toho se s časovým zpožděním spustí kontakt relé KTZ, sepne vinutí KMZ, což způsobí zkrat posledního stupně spouštěcího reostatu KMZ a motor pokračuje v práci v budoucnu, jako u veverčí rotor.
Motor se zastaví stisknutím tlačítka SB a v případě přetížení se motor vypne uvolněním spínače QF. Tím se vypne síťový stykač, jeho pomocný kontakt KM a všechny zrychlovací stykače a časová relé bez časového zpoždění. Řetěz je připraven na další cyklus.
Pro spuštění volnoběžných otáček indukčního motoru se zvýšeným výkonem s přepínáním vinutí statoru z hvězdy do trojúhelníku můžete použít schéma na Obr. 3. Spínání v tomto obvodu probíhá automaticky v závislosti na čase Stisknutím tlačítka SB2 se vinutí statoru připojí k síti stykačem KM. Současně je do sítě připojeno časové relé KT a cívka KY, která pomocí tří kontaktů v silovém obvodu spojuje vinutí statoru s hvězdou.
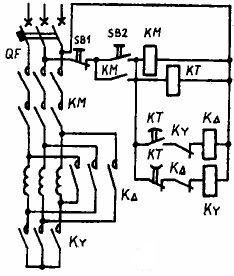
Rýže. 3. Řídicí obvod jako funkce času indukčního motoru přepnutím z Y na Δ
Motor se spustí a zrychlí při sníženém napětí. Po uplynutí předem stanoveného časového intervalu relé KT vypne stykač KY a zapne cívku stykače KΔ spojující vinutí statoru s trojúhelníkem. Protože je v obvodu cívky K∆ pomocný kontakt KY, nemůže dojít k sepnutí stykače K∆ před sepnutím stykače KMY.
Postupné spouštění vícerychlostních indukčních motorů je ekonomičtější a provádí se v závislosti na čase.Uvažujme příklad postupného spouštění dvourychlostního motoru s jedním vinutím (obr. 4). Vinutí statoru jde z trojúhelníku do dvojité hvězdy dvojnásobnou rychlostí.
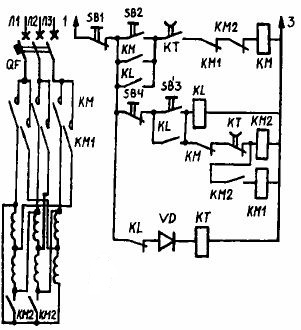
Rýže. 4. Řídicí obvod jako funkce času rozběhu kroku indukčního motoru
Motor se spíná stykačem KM na první stupeň otáček a stykači KM2 a KM1 na druhý. Pro zapnutí motoru na první rychlost se stisknutím tlačítka SB2 zapne cívka stykače KM a jeho výkonové kontakty KM v hlavním obvodu. Vinutí statoru zapojené do trojúhelníku je připojeno k síti. Cívka časového relé KT je nabuzena a jeho zapínací kontakt (v obvodu cívky KM) je sepnut.
 Postupné spouštění motoru při druhé rychlosti otáčení se provádí pomocí mezilehlého relé K, jehož obvod je uzavřen startovacím tlačítkem SB3. Zapínací kontakty K obcházejí dvě spouštěcí tlačítka a vypínací kontakt K deaktivuje časové relé KT. Zapínací kontakt KT v obvodu cívky KM se vypne s návratovým zpožděním, díky čemuž se cívka KM v první fázi rozběhu sepne a motor se zapne na první rychlost.
Postupné spouštění motoru při druhé rychlosti otáčení se provádí pomocí mezilehlého relé K, jehož obvod je uzavřen startovacím tlačítkem SB3. Zapínací kontakty K obcházejí dvě spouštěcí tlačítka a vypínací kontakt K deaktivuje časové relé KT. Zapínací kontakt KT v obvodu cívky KM se vypne s návratovým zpožděním, díky čemuž se cívka KM v první fázi rozběhu sepne a motor se zapne na první rychlost.
Kontakt bloku KM v obvodu cívky KM2 a KM1 se rozepne. Tyto cívky jsou také odpojeny od otevřeného kontaktu KT, který je při návratu zpožděn. Po určité době zapínací kontakt KT vypne cívku KM a jeho rozpínací kontakt sepne cívky stykačů druhé rychlosti otáčení KM1 a KM2. Jejich hlavní kontakty v napájecím obvodu přepnou statorové vinutí do dvojité hvězdy a připojí jej k síti.
Proto motor nejprve zrychlí na první rychlostní stupeň a poté automaticky přepne na druhý rychlostní stupeň. Všimněte si, že předběžné připojení vinutí statoru k dvojité hvězdě a jeho následné zařazení do sítě se provádí nejprve zapnutím dvou uzavíracích kontaktů napájecího zdroje KM2 a poté tří uzavíracích hlavních kontaktů KM1. Takovéto spínací sekvence je dosaženo tím, že cívka KM1 je připojena k napětí přes kontakt uzavíracího bloku KM2. Motor se zastaví stisknutím tlačítka «Stop», označeného na schématu písmenem SB1.
Na Obr. 5 znázorňuje schéma automatického startu paralelně buzeného stejnosměrného motoru v závislosti na čase. Sepnutím jističe QF je motor připraven ke spuštění. Proud protéká obvodem složeným z vinutí časového relé KT1, kotvy motoru M a dvou stupňů startovacího reostatu R1 + R2.
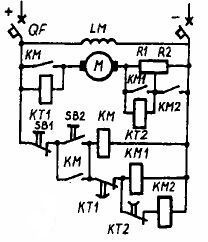
Rýže. 5. Řídicí obvod jako funkce času buzeného stejnosměrného motoru
Vzhledem k vysokému odporu cívky relé KT1 je proud v tomto obvodu velmi malý a nemá žádný vliv na motor, ale relé samotné se spustí a rozepne jeho otevřený kontakt v obvodu stykače KM1. V cívce druhého časového relé KT2, zapojeného paralelně s odporem R1, je větven tak malý proud, že jej nelze sepnout. Zapne se také LM budicí vinutí motoru.
Motor se spouští stisknutím tlačítka SB2 Současně se sepne stykač KM a jeho kontakt v obvodu kotvy motoru. Velký startovací proud je omezen dvěma stupni reostatu R1 a R2.Část tohoto proudu je odbočena do cívky relé KT2 a při aktivaci rozepne svůj kontakt KT2 v obvodu stykače KM2. Současně se sepnutím obvodu kotvy M zkratuje pracovní kontakt stykače KM cívku relé KT1.
Po určitém časovém intervalu, kdy se relé vrátí, KT1 sepne svůj kontakt KT1 v obvodu stykače KM1. Tento stykač svým pracovním kontaktem KM1 zkratuje první stupeň R1 spouštěcího reostatu a vinutí časového relé KT2. Se zpožděním návratu jeho pracovní kontakty KT2 sepnou stykač KM2, který svými pracovními kontakty KM2 zkratuje druhý stupeň R2 spouštěcího reostatu. Tím je start motoru dokončen.
Po stisku tlačítka SB1 stykač KM vypne a odpojí svůj hlavní kontakt v obvodu kotvy. Kotva zůstává pod napětím, ale ukazuje se, že je zapojena do série s cívkou relé KT1, díky čemuž jí protéká malý proud. Relé KT1 bude fungovat, rozepne svůj kontakt v obvodu stykačů KM1 a KM2, ty vypnou a rozepnou své kontakty, zkratové odpory R1 a R2. Motor se zastaví, ale jeho budicí vinutí zůstane připojeno k síti a tím je motor připraven k dalšímu startu. Úplné vypnutí motoru se provádí vypnutím spínače automatického vstupu BB.
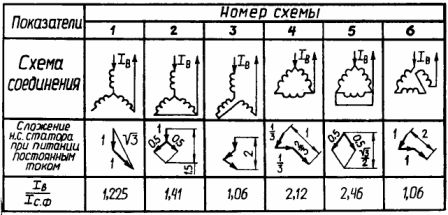
Dynamické brzdění motorů se také provádí jako funkce času. Pro dynamické brzdění, například u indukčního motoru, je statorové vinutí odpojeno od sítě střídavého proudu a podle jednoho ze schémat uvedených v tabulce 1 je připojeno ke zdroji stejnosměrného proudu.V lesnictví a dřevozpracujícím průmyslu se stejnosměrný proud získává ze speciálních polovodičových usměrňovačů. V tomto případě není potřeba speciální zdroj stejnosměrného proudu.
Při zapnutí statorového vinutí podle jednoho ze schémat (viz tabulka 1) se ve vinutí k usměrňovači vytvoří stacionární magnetické pole. Ve stacionárním poli se rotor motoru dále otáčí setrvačností. V tomto případě se v rotoru motoru vytvoří střídavé EMF a proud, který vybudí střídavé magnetické pole. Měnící se magnetické pole rotoru při interakci se stacionárním polem statoru vytváří brzdný moment. V tomto případě se akumulovaná kinetická energie z rotoru a pohonu přeměňuje v obvodech rotoru na elektrickou energii a ta na teplo.
Tepelná energie je odváděna z okruhu rotoru do okolí. Teplo generované v rotoru zahřeje motor. Množství uvolněného tepla závisí na proudu ve vinutí statoru, když je napájeno stejnosměrným proudem. V závislosti na schématu přijatém pro zapnutí vinutí statoru, když je napájeno stejnosměrným proudem, se poměr proudu k fázovému proudu statoru bude lišit. Poměry těchto proudů pro různá spínací schémata jsou uvedeny v tabulce. 1
Okruh dynamického brzdění indukčního motoru je znázorněn na Obr. 6.
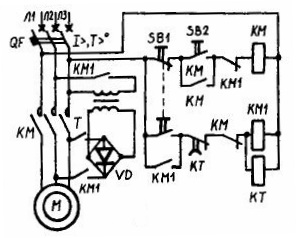
Rýže. 6. Schéma dynamického brzdění asynchronního motoru
Stiskem spouštěcího tlačítka SB1 síťový stykač KM zapne motor na střídavou síť, jeho zapínací blokový kontakt přepne cívku KM na vlastní napájení.Rozpínací kontakt KM odpojí napájecí obvod stykače brzdy KM1 a časového relé KT. Když je stisknuto tlačítko SB, stykač vedení KM je bez napětí a obvod cívky stykače KM1 bude pod napětím.
Stykač KM1 zahrnuje své kontakty KM1 v obvodu transformátoru T a usměrňovače V, v důsledku čehož bude vinutí statoru napájeno stejnosměrným proudem. Aby nedocházelo k náhodnému nezávislému spínání linkového stykače, je rozpínací kontakt bloku KM1 zapojen do série s jeho cívkou KM. Současně s brzdovým stykačem je sepnuto časové relé KT, které je konfigurováno tak, že jeho rozpínací kontakt KT bude vypněte cívku KM1 a časové relé po určitém časovém intervalu. Nastavení časového relé KT je zvoleno tak, aby doba sepnutí relé tkt byla rovna součtu doby doběhu motoru tT a správné doby vypínání stykače KM1.