Uzly automatických řídicích obvodů jako funkce času
 Elektromagnetické, elektronické, motorové a elektropneumatické jsou široce používány v automatizačních obvodech. časové relé... Nejběžnější schémata převodu trvání signálu jsou znázorněna na obr. 1. Schéma Obr. 1, a poskytuje pulz o určité délce, bez ohledu na dobu trvání lisování tlačítka SB. Po stisknutí tlačítka SB se aktivuje relé K, které dá impuls k zapnutí mechanismu. Doba trvání impulsu je určena časovým zpožděním relé KT. Tlačítko SB lze nahradit příkazovým relé KQ.
Elektromagnetické, elektronické, motorové a elektropneumatické jsou široce používány v automatizačních obvodech. časové relé... Nejběžnější schémata převodu trvání signálu jsou znázorněna na obr. 1. Schéma Obr. 1, a poskytuje pulz o určité délce, bez ohledu na dobu trvání lisování tlačítka SB. Po stisknutí tlačítka SB se aktivuje relé K, které dá impuls k zapnutí mechanismu. Doba trvání impulsu je určena časovým zpožděním relé KT. Tlačítko SB lze nahradit příkazovým relé KQ.
Schémata Obr. 8, b (s elektromagnetickým časovým relé) a Obr. 1, c (s elektropneumatickým nebo motorickým časovým relé) slouží k dodání krátkodobého impulsu po zahájení činnosti pojezdového spínače SQ. V těchto a následujících schématech místo kontaktů pohybový spínač Lze použít reléové kontakty KQ.
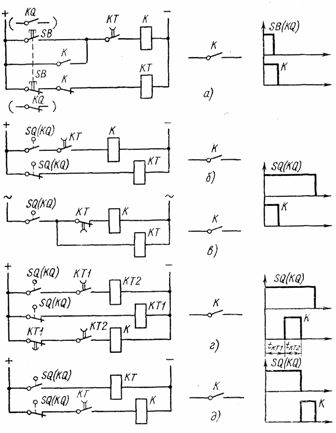
Rýže. 1. Obvody pro převod trvání signálů
Schéma Obr.Id poskytuje impuls trvání tKT2 s časovým zpožděním tKT1 po začátku činnosti spínače SQ.
Uzel obvodu Obr. 1, e. Je-li požadováno časové zpoždění tKT1 před aplikací tohoto impulsu, obvod na Obr. 1, e. Doba trvání pulzu je tKT2.
V obvodech polohového řízení je obvod z Obr. 1g, který plní funkci vydání dlouhého povelu po skončení dopadu na vypínací spínač SQ. Příkaz je zrušen na začátku nové akce na přepínači SQ.
Krátkou časovou prodlevu (do 1,5 s) lze dosáhnout zapínáním a vypínáním konvenčním způsobem mezilehlá relé kvůli posunutí jejich cívek s kondenzátory nebo diodami.
Ve schématu na Obr. 2, a když je kontakt KQ sepnutý, relé K se aktivuje s časovým zpožděním určeným dobou nabíjení kondenzátoru C. Při sepnutí KQ se také relé K vrátí se zpožděním v důsledku vybití kondenzátoru.

Rýže. 2. Získání časových zpoždění posunutím cívek mezilehlých relé s kondenzátory nebo diodami
Chcete-li získat časové zpoždění pouze při sepnutém relé, použijte obvod na Obr. 2, b. Zpoždění při vypnutí relé prakticky chybí, protože kondenzátor se rychle vybíjí na rezistor R (odpor rezistoru R je výrazně menší než odpor cívky relé K). Podobný problém řeší obvod na Obr. 2c, který využívá jeden rozpínací kontakt relé KQ. Nevýhodou tohoto obvodu je značná ztráta energie přes rezistor při absenci signálu.
Schéma na Obr. 2d, kde při rozepnutí kontaktu KQ se relé K vypne s časovým zpožděním řízeným odporem R.
Podle schématu na Obr. 2, e při sepnutí K po sepnutí kontaktu povelového relé KQ se vytvoří časové zpoždění.
Je-li požadováno malé zpoždění návratu relé K při aktivaci povelového relé KQ, diagram na Obr. 2, e, ve kterém je cívka relé K posunuta diodou.
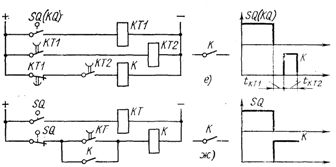
Schéma generování impulsů dané doby trvání a pracovního cyklu je znázorněno na Obr. 3, a. Doba trvání impulsu je určena časovým zpožděním relé KT2, pauza je určena dobou zpoždění relé KT1.
Rýže. 3. Reléové obvody pro generování impulsů
Na Obr. 3, b je uvedeno schéma periodického zapínání mechanismu s prodlouženou dobou pauzy Doba sepnutí stykače KM je rovna časovému zpoždění relé KT1, doba trvání pauzy je součet. zpoždění relé KT2 a KTZ. Časový diagram je na Obr. 3, c.
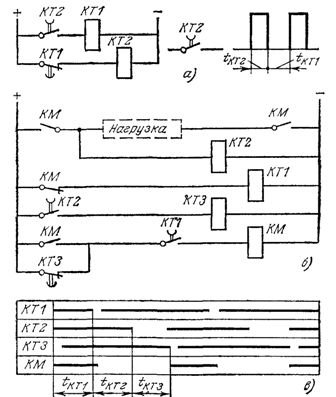
Schémata pulzních generátorů časových relé popř logické prvky (viz níže) se také používají k regulaci rychlosti činnosti lineárních mechanismů. Rozšířil se také regulátor teploty, obsahující povelové zařízení KEP-12U, v mnoha ohledech podobné časovému relé motoru. Jednotka má výkonný motor, variabilní převody, vačkový buben, spínač a 12 kontaktů.
Regulátory rychlosti obvykle používají schéma pro cyklický provoz zařízení KEP-12U (obr. 4, a). Zapojení je provedeno pomocí relé K1 a K2 a kontaktů povelového zařízení KT.1 a KT.2, jehož schéma zapojení je na obr. 4, b.
Před zahájením práce zapněte spínač S.Když je kontakt relé KQ krátce sepnut, čímž se vydá příkaz ke spuštění pracovního cyklu, relé K1 se zapne a samo sepne. Relé K2 se aktivuje zapnutím povelového zařízení KT. Vinutí motoru LM1 a LM2 se nabudí a buben vačky se začne otáčet. Výstupní kontakty zařízení KT.3, KT.4 atd., sekvenční sepnutí, v nastavených časových okamžicích (viz schéma na obr. 4, b) dávají příkazy k zapnutí lineárních mechanismů. Uprostřed cyklu se kontakt KT.1 rozepne a relé K1 se vypne.
Obrázek 4. Regulátor rychlosti linky se zařízením KEP-12U
Cívka relé K2 podporuje napájení přes kontakt zařízení KT.2. Po otočení bubnu o úhel 360° se otevře kontakt KT.2, motor zařízení KEP-12U se zastaví. Řetěz je připraven na další cyklus.
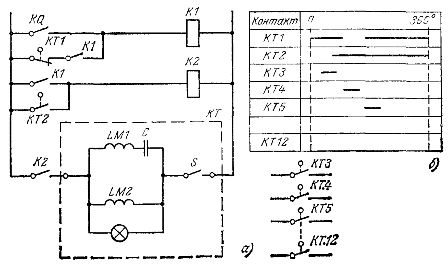
Na závěr zvážíme dvě schémata pro dálkové ovládání zpoždění elektromagnetických časových relé.
Pro změnu zpoždění z ústředny lze použít dvoucívkový reléový obvod se spouštěcími cívkami KT.1 a zpětnými cívkami KT. 2 (demagnetizace), jejichž MDS směřují opačně (obr. 5, a). MDS spouštěcí cívky se nastavuje pomocí potenciometru RP. Aby se zabránilo opakovanému provozu CT poté, co se reverzace magnetizace vrátí a vypne, musí být MDS vypínací cívky menší než MDS postačující k vytažení kotvy, nebo musí být do cívky obvodu zaveden vlastní zapínací kontakt relé (obr. 5, a).
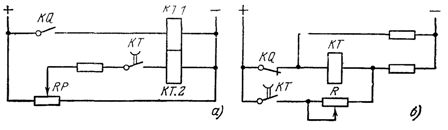
Obrázek 5. Schéma dálkového nastavení zpoždění časového relé
Podle schématu na Obr.5, b proveďte vzdálenou změnu časového zpoždění jednocívkového relé. Při rozepnutí kontaktu KQ protéká cívkou relé KT demagnetizační proud, který je regulován odporem R. Se zvyšujícím se demagnetizačním proudem se zpoždění relé snižuje a naopak. Při napájecím napětí 220 V je použito relé s cívkou pro jmenovité napětí 110 V.