Elektrické obvody elektrických pohonů mostových jeřábů ovládaných z podlahy
Schémata faucetu a ochranné prvky
 V průmyslu, při málo náročných přepravních a skladovacích provozech, ve strojovnách a laboratořích se používá velké množství mostových jeřábů, které pracují buď sporadicky nebo s počtem zdvihových cyklů 6 - 10 za hodinu. Je ekonomicky nepraktické používat pro takové jeřáby obsluhu na plný úvazek. To je důvod, proč je stále více mostových jeřábů ovládáno z podlahy.
V průmyslu, při málo náročných přepravních a skladovacích provozech, ve strojovnách a laboratořích se používá velké množství mostových jeřábů, které pracují buď sporadicky nebo s počtem zdvihových cyklů 6 - 10 za hodinu. Je ekonomicky nepraktické používat pro takové jeřáby obsluhu na plný úvazek. To je důvod, proč je stále více mostových jeřábů ovládáno z podlahy.
Zvláštností mostových jeřábů ovládaných z podlahy je možnost přístupu k jeřábu za účelem opravy a ovládání pouze na speciálně určených místech vybavených vhodnými prostory pro kontrolu mechanismů a elektrických zařízení. Proto musí být celý systém ochrany elektrického zařízení jeřábu konstruován tak, aby jeřáb v nouzových podmínkách mohl být přiveden do prostoru opravy pod kontrolou z podlahy a v případě nepřítomnosti jeřábu v okruhu. zkraty a zemní poruchy.
V tomto ohledu na jeřábech s pohonem na podlahu jističe nejsou nainstalovány.Hlavní obvody jsou chráněny automatickým vypínačem základní vozíkya ochrana řídicích obvodů — pojistky pro proudy 15 A, 380 V s průřezem vodičů ovládacích obvodů 2,5 mm2. Provádí se ochrana proti přetížení elektrických pohonů mechanismů tepelná relé v hlavních okruzích motorů.
Aby se mohl kohoutek po spuštění tepelné ochrany pohybovat, jsou kontakty relé připojeny k tlačítku na ovládacím panelu. Ventil je vybaven signalizačními kontrolkami přítomnosti napětí na vstupu, napětí za stykačem pro ochranu vedení a kontrolkou pro činnost tepelné ochrany.
Elektrická schémata mechanismů pro pohyb mostových jeřábů
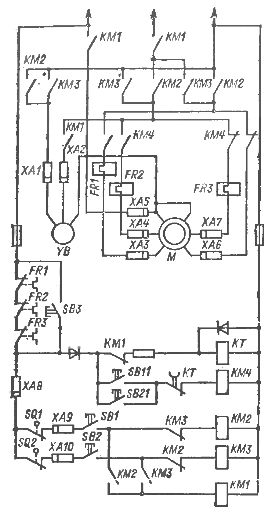
Na Obr. 1 znázorňuje schéma elektrického pohonu v pohybu při zkratovém řízení jednorychlostního motoru.
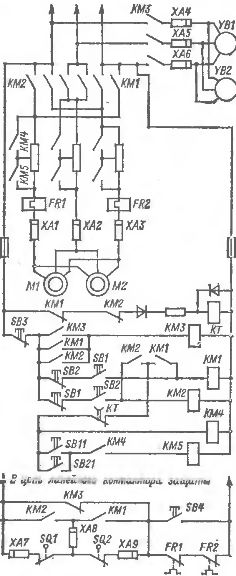
Rýže. 1. Schéma elektrického pohonu (s jednorychlostním motorem s kotvou nakrátko) mechanismu pohybu jeřábu při ovládání z podlahy: M1, M2 — elektromotory, YB1, YB2 — elektromagnety brzd nebo elektrohydraulických tlačníků, KM1, KM2 — směrové stykače, KM4, KM5 — odporové stykače ve statorech obvodu, KMZ — brzdový stykač, KT — časové relé rozběhu, FR1, FR2 — tepelná relé, SQ1, SQ2 — koncové spínače, SB1, SB2 — tlačítka směru pohybu (dvě - cesta), SB11, SB21 — tlačítka start, SB3 — tlačítko zastavení volného pohybu, SB4 — tlačítko bypassu tepelné ochrany, XA1 — XA9 — kontakty přenosových vozíků
Tento obvod je určen pro pohon podvozkových jeřábů o nosnosti 3-20 t a jeřábových pohonů pro jeřáby o nosnosti 2-5 t. Statorová vinutí motoru s kotvou nakrátko jsou napájena ze sítě přes dva stupně rezistory. Mechanické charakteristiky pohonu jsou na obr. 2, a.
Ovládání elektropohonu — ze závěsných tlačítek. Součástí ovládání jsou dvě hlavní obousměrná tlačítka SB1 a SB2, která dávají povel k pohybu ve dvou směrech. Přechod do polohy bez seřizovacích odporů se provádí při vydávání příkazů pomocí tlačítek SB11, SB21.
Když je motor zapnutý, napájení brzdového pohonu YB je přiváděno přes kontakty stykačů KM1, KM2 přes kontakty KMZ. Po vypnutí elektromotoru pohon brzdy nadále přijímá energii a mechanismus má volný chod.Pro uvolnění brzdy slouží tlačítko SB3, které je společné pro podvozek a nápravový mechanismus. Při spuštění koncové spínače SQ1 a SQ2, stykač ochranného vedení je vypnutý a superponovaný mechanická brzda.
K zajištění elektřiny opačné brzdění po použití volného spuštění časové relé CT s časovým zpožděním 2-3 s, které zpomalí pohon do polohy s minimálním rozběhovým (brzdným) momentem.
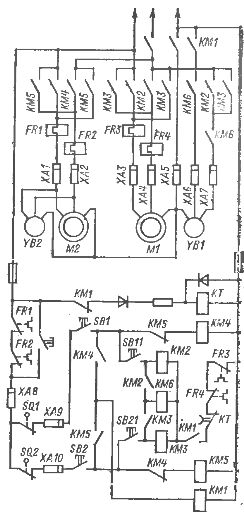
Na Obr. 3 je schéma elektrického pohonu pro pohyb mostového jeřábu (vozíku) s pomocí dvourychlostní motory s kotvou nakrátko… Motor má dvě samostatná vinutí s pólovým poměrem



Tlačítko SB1 nebo SB2 obsahuje směrové stykače KM1, KM2 a také nízkorychlostní stykač KM4. Po přivedení energie do pomaloběžného vinutí motoru přes stykač KMZ je napájen akční člen brzdy YB1, YB2.Pro přepnutí na vysokou rychlost dvousměrná tlačítka SB sepnou kontakty SB11, SB21 (druhá poloha) a sepnou stykač KM6.
Vysokorychlostní cívka je připojena k síti přes odpor současně s nízkorychlostní cívkou. Nízkorychlostní cívka se pak vypne. Po časovém zpoždění relé KT (2-5 s) sepne stykač KM5 a motor dosáhne své přirozené charakteristiky vysokorychlostního režimu (obr. 2, b).
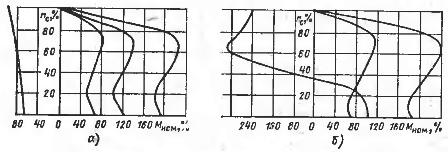
Rýže. 2. Mechanické charakteristiky diagramů Obr. 13
Když je motor odpojen od sítě, brzdový akční člen nadále přijímá energii a dochází k doběhu. Při přechodu z vysoké rychlosti na nízkou lze použít elektrické brzdění. Pro uvolnění brzdy stačí stisknout tlačítko SB3.
Když se otevřením spustí poslední obrana síťový stykač na ochranném panelu elektromotor se vypne a mechanická brzda se zapne. Mechanismus je inhibován s maximální intenzitou.
Díky použití rezistorů v obvodu pro vysokorychlostní vinutí je pod řízením časového relé KT prováděn relativně měkký rozběh, ale brzdný moment pomaloběžného vinutí není omezen a v tomto případě měkký brzdění lze dosáhnout několika pulzními spínači tlačítka SB1 nebo SB2.
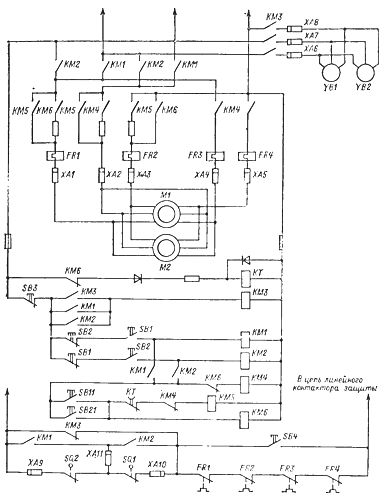
Rýže. 3. Schéma elektrického pohonu (s dvourychlostním motorem s kotvou nakrátko) mechanismu pohybu jeřábu při ovládání z podlahy: M1.M2 - elektromotory, YB1, YB2 - brzdové pohony, KM1, KM 12 - stykače pro směr jízdy, KMZ - brzdový stykač, KM4 - pomaloběžný stykač, KM5 - vysokorychlostní stykač, KM6 - odporový stykač v obvodu statoru, FRI, FR2 , FR3 — tepelná relé, KT — relé doby řízení chodu, SQ1, SQ2 — koncové spínače, SB1, SB2 — tlačítka směru jízdy (obousměrná): SB11, SB21 — tlačítka vysoké rychlosti (druhá poloha tlačítka SB1, SB2), СВЗ — uvolnění tlačítka volného zastavení, SB4 — tlačítko bypassu tepelné ochrany, ХА1- ~ ХЛ11 — kontakty přenosových trolejí.
Na Obr. 4 je znázorněno schéma pojezdového mechanismu mostového jeřábu pomocí dvourychlostního motoru bez volného odtoku. Obvod se liší od uvažovaného sekvenčním zahrnutím pomaloběžných a vysokorychlostních vinutí a určitým omezením brzdného momentu, když jsou vinutí zapojena do série. Schéma se doporučuje pro mostové jeřáby provozované venku.
Schémata zapojení zdvihacích mechanismů jeřábů
Na Obr. 5 znázorňuje řídicí obvod pro pohon elektrického kladkostroje pomocí dvourychlostního motoru s kotvou nakrátko se dvěma nezávislými vinutími s poměrem počtu pólů 4/24 a 6/16. Obvod je postaven na principu dvojitého vypínání ze dvou nezávislých zařízení hlavního obvodu vinutí elektromotoru a obvodů brzdového pohonu, což zajišťuje potřebnou spolehlivost pohonu kladkostroje.
Nízkootáčkové vinutí elektromotoru přijímá napájení přes kontakty linkového stykače KM1, kontakty směrových stykačů KM2, KMZ a přerušovací kontakty stykače KM4 po stisknutí odpovídajícího tlačítka SB1, SB2 (první poloha).
Rýže. 4. Schéma elektrického pohonu (s dvourychlostním motorem nakrátko) mechanismu pohybu jeřábu: M — elektromotor, YB — pohon brzdy, KM1, KM2 — stykače pro směr pohybu, KMZ — pomalá stykač, KM4 — vysokorychlostní stykač , KM5 — vysokorychlostní odporový stykač, CT — relé řízení doby rozběhu, FR4 — tepelná relé, SQ1, SQ2 — koncové spínače, SB1, SB2 — tlačítka směru jízdy, SB11, SB21 — vysoká Speed Buttons, SB3 — Tlačítko Bypass Thermal Relay, XA1 -XA10 — Kontakty pro přenos proudu
Po stisku tlačítka SB11 (SB21) přijme cívka stykače KM4 napájení, přepne se z nízké rychlosti na vysokou s minimálním přerušením napájení. V tomto případě nemůže existovat žádná poloha, když jsou vysokorychlostní a nízkorychlostní cívky deaktivovány. Přechod z pomaloběžného vinutí na vysokorychlostní vinutí se provádí pod řízením časového relé KT. Při aktivaci limitní ochrany se vinutí motoru a brzda aktivují dvakrát.
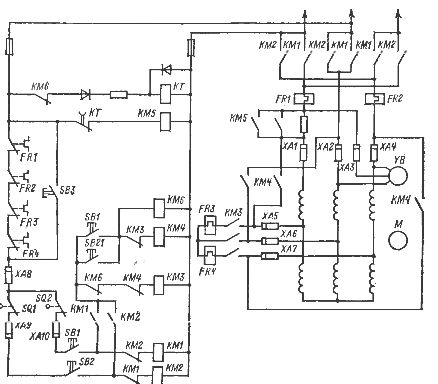
Na Obr. 6 je schéma elektrického pohonu zvedacího mechanismu se dvěma elektromotory nakrátko spojenými mezi sebou a s převodovkou přes planetové soukolí s převodovým poměrem 6-8. Nízkootáčkový elektromotor M2 je zapnutý po celou dobu chodu mechanismu. Vysokootáčkový motor se zapíná při vysokorychlostním provozu.Nízkootáčkový elektromotor má vestavěnou brzdu.
Rýže. 5. Schéma elektrického pohonu (s dvourychlostním motorem nakrátko) zdvihacího mechanismu při ovládání z podlahy: M — elektromotor, YB — brzdová cívka, KM1 — stykač lilie, KM2 — KMZ — směrové stykače, KM4 — stykač rychlosti spínání, FR1 — FR3 — tepelné relé, CT — relé řízení zrychlení, SQ1, SQ2 — koncové spínače, SB1, SB2 — směrová tlačítka (dvoucestná). SB3 — tlačítko pro směšovací tepelná relé, SB11, SB21 — rychlotlačítka (druhá poloha tlačítek SB1, SB2), XA1 — XA10 — kontakty proudových přenosových trolejí.
Rýže. 6. Schéma mikromotoru zvedacího mechanismu při ovládání z podlahy: M1 - rychloběžný elektromotor, M2 - pomaloběžný elektromotor, YB1 - rychloběžná brzdová cívka, YB2 - pomaloběžná motorová brzdová cívka, KM1 - lineární stykač, KM2 - KMZ - otáčky vysokorychlostních stykačů, KM4, KM5 - pomaloběžné stykače, KM6 - stykač vysokorychlostní brzdy, KT - relé řízení doby rozběhu, SQ1, SQ2 - koncové spínače, FR1 - FR4 - tepelná relé, SB1, SB2 - obousměrná směrová tlačítka , SB11, SB21 — vysokorychlostní tlačítka (druhá poloha tlačítek SB1, SB2), XA1— XA10 — kontakty proudových přenosových vozíků
Vysokootáčkový elektromotor má samostatnou brzdu ovládanou pomocí elektrohydraulická pomocná síla… Když je stisknuto směrové tlačítko SB1 (SB2), cívka stykače KM4 (KM5) je nabuzena a nízkootáčkový motor se zapne. Současně se zapne stykač společné sítě KM1.
Při úplném stisku tlačítka SB1 (SB2) jsou kontakty SB11 (SB21) sepnuty, cívka stykače KM2 (KMZ) a KM6 je pod napětím, ale po uplynutí doby rozběhu při nízkých otáčkách pod kontrolou Relé KT , zapne se vysokorychlostní motor.
Při zpomalování stoupání nebo klesání po vypnutí vysokootáčkového motoru je brzdění na nízkou rychlost prováděno brzdou YB1. Po aktivaci koncových spínačů SQ1 a SQ2 dojde k vypnutí elektrického pohonu s dvojitým přerušením obvodu motorového a brzdového pohonu.
Všechna popsaná schémata, v souladu s ustanovením pro aktivaci jeřábových mechanismů při práci z podlahy, pouze neustálým stisknutím tlačítka Při vypnutí jakéhokoli typu ochrany se mechanismus zastaví, bez ohledu na stav ovládání tlačítka přístroj.
Uvažovaná schémata na Obr. 2-5 lze sestavit z standardní magnetické startéry typ PMA, PML a časové relé. Výjimkou je schéma na obr. 2, ve kterém je pro spínání otáček použit stykač stejnosměrný stykač MK1-22, 40 A, 380 V, cívka 220 V. Podle naznačených schémat byly vyrobeny ovládací panely pro motory o výkonu 0,8 až 2×8,5 kW a ovládací panely pro zdvihové motory o výkonu 10 až 22 kW. vyvinuté .