Řídicí obvody motoru jako funkce rychlosti
 Při řízení motoru jsou otáčky sledovány jako funkce otáček rotoru motoru, aby se při změnách ovlivňovaly odpovídající ovládací prvky.
Při řízení motoru jsou otáčky sledovány jako funkce otáček rotoru motoru, aby se při změnách ovlivňovaly odpovídající ovládací prvky.
V řídicích obvodech spouštění motoru lze použít relé regulace otáček nebo malé měřicí elektrocentrály. Pro tyto účely se však používají extrémně zřídka kvůli složitosti konstrukce, vysoké ceně a nedostatečné spolehlivosti. Proto jsou otáčky motoru řízeny nepřímými metodami. U asynchronních a synchronních motorů je frekvence otáčení řízena emf a frekvencí rotorového proudu a u stejnosměrných motorů emf kotvy.
Na Obr. 1, a a b znázorňují schémata automatického spouštění paralelně buzeného stejnosměrného motoru v závislosti na frekvenci otáčení a v závislosti na EMF a napětí kotvy od okamžiku spuštění. Řízení frekvence otáčení se provádí měřením EMF motoru, které se mění úměrně frekvenci otáčení.
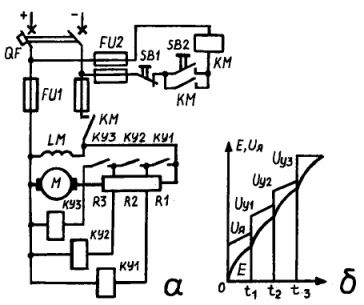
Rýže. 1.Řídicí obvody jako funkce otáček: aab — schéma zapojení a spouštění paralelně buzeného stejnosměrného motoru
Protože EMF je úměrné otáčkám motoru, automatické zadávání jednotlivých stupňů startovacího reostatu se provádí při určité velikosti ovládacího napětí zrychlovacích stykačů KM1, KM2 a KMZ, z nichž každý je nastaven na určité zatažení. hodnota. Stisknutím startéru tlačítka SB2 zapíná síťový stykač KM. Všechny odpory R1, R2, R3 budou zapojeny do série s vinutím kotvy a budou omezovat proud.
Při určité rychlosti n1 je napětí Uy1 cívky stykače K1

kde Zde Toto je koeficient stroje.
Když se Uy1 bude rovnat stahovacímu napětí, stykač KM1 sepne a zkratuje odpor R1. Další zvýšení rychlosti otáčení až do rotace n2 a n3 povede ke zvýšení napětí na cívkách stykačů K2 a zkratu na hodnoty


V tomto případě budou stykače K2 a zkrat pracovat v sérii a zkratovat odpory R2 a R3. Po zkratování odporu R3 bude spouštěcí proces dokončen a motor může běžet dlouhou dobu.
EMF v obvodu rotoru indukčního motoru je úměrné skluzu, tj. E2s = E2s. Zde E2 je emf stacionárního rotoru.
Čím nižší je skluz, tím nižší je EMF, to znamená, že čím vyšší jsou otáčky rotoru motoru. Pro řízení spouštění střídavých motorů s vinutým rotorem se používají relé, která řídí hodnotu EMF v obvodu rotoru.Na tato napětí jsou nastavena příslušná zařízení (relé, stykače), která zkratují rozběhové odpory.
Pro řízení indukčních motorů s vinutým rotorem a synchronních motorů lze použít také frekvenční metodu v závislosti na rychlosti. Tato metoda je založena na známé závislosti frekvence rotorového proudu f2 na frekvenci otáčení statorového pole n0 a rotoru n2, tzn.
Protože každá rychlost rotoru odpovídá určité hodnotě f2, relé nastavené na tuto frekvenci a připojené k obvodu rotoru motoru bude působit na obvod cívky stykače. Stykač zkratuje odporové stupně při dané rychlosti.
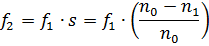
Brzdění protilehlými motory se provádí v závislosti na rychlosti relé regulace rychlosti SR. Na obr. 2 a, b znázorňují příklady zastavení asynchronních motorů opozicí.
Rýže. 2. Schémata zastavení asynchronních motorů pomocí opozice: a — nereverzibilní; b - reverzibilní
Pojďme se podívat, jak tato schémata fungují.
Stisknutím tlačítka SB2 se zapne cívka stykače KM (viz obr. 2, a), která sepne silové kontakty a zablokuje tlačítko SB2. Zároveň je odpojí od sítě kontakt vypínacího bloku KM v obvodu cívky brzdového stykače KM1 a relé regulace otáček SR. Když rotor motoru dosáhne určité rychlosti, kontakt SR se sepne, ale to již nezpůsobí činnost stykače KM1. Motor dále běží normálně.
Zastavení motoru protispínací brzdou se provádí stisknutím tlačítka SB.Současně je neutralizována cívka stykače KM a její hlavní kontakty zmizí a odpojí motor od sítě. Vypínací kontakt KM v obvodu stykače brzdy KM1 se sepne. Vzhledem k tomu, že v tomto okamžiku je kontakt relé SR regulace otáček sepnut, hlavní kontakty stykače brzdy jsou okamžitě zapnuty a vinutí statoru je přepnuto na zpětný chod, magnetické pole se začne otáčet v opačném směru, tzn. rotace rotoru a motoru se zastaví protispínáním. Otáčky rotoru klesají a při určité malé hodnotě se rozepnou jeho kontakty relé regulace otáček RKS a odpojí motor od sítě.
V případě zpětného řízení s opačným brzděním (obr. 2, b) se motor spustí vpřed stisknutím tlačítka SB1, které sepnutím obvodu cívky stykače KM1 zajistí připojení motoru k el. síť. Rotor motoru se začne otáčet a když dosáhne určité rychlosti, sepne se zapínací kontakt SR1 relé regulace rychlosti a rozepne se rozpínací kontakt SR2.
K sepnutí cívky stykače KM2 nedojde, protože rozpínací kontakt stykače KM1 přerušil obvod. V této poloze bude motor dále běžet, dokud nestisknete tlačítko SB. Po stisku tlačítka SB se obvod cívky KM1 vypne. Tím se uzavře vypínací kontakt KM1 a obvod cívky stykače KM2 bude napájen.
Vinutí statoru motoru se zapojí pro reverzaci. Když se rotor stále setrvačností otáčí ve stejném směru, dochází k protichůdnému brzdění.Když otáčky klesnou na určitou malou hodnotu, relé regulace otáček rozepne svůj kontakt SR1, stykač KM2 se vypne a odpojí motor od sítě.
Chcete-li nastartovat motor zpětným chodem, stiskněte tlačítko SB2. Celý proces bude podobný popsanému. Nyní roli brzdového stykače hraje stykač KM1 a kontakty SR2 relé regulace rychlosti budou řídit proces brzdění.
Automatické spouštění synchronního motoru je spojeno se známými potížemi, protože v tomto případě je nutné nejen omezit spouštěcí proud, ale také synchronizovat stroj se sítí.
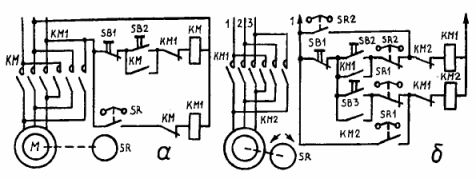
Řídicí obvod pro synchronní motor s nízkým výkonem je na Obr. 3. Omezení zapínacího proudu je zajištěno aktivními odpory obsaženými ve vinutí statoru. Před nastartováním motoru zapněte automatické vstupní spínače QF a QF1 AC a DC sítě, které poskytují maximální a tepelnou ochranu. Stisknutím spouštěcího tlačítka SB2 se zapne cívka stykače KM a vinutí statoru synchronního motoru přes hlavní kontakty KM se připojí k síti přes spouštěcí odpory Rn. Cívka je samosvorná a její kontakt ve stejnosměrném obvodu obsahuje blokovací relé KV, jehož zapínací kontakt sepnutím připravuje cívky stykačů K1 a K2 k sepnutí.
Frekvenční relé KF1 a KF2 v budicím obvodu LM rotoru pracují v závislosti na otáčkách motoru.Při rozběhu, kdy je skluz rotoru největší, se rozepnou vypínací kontakty relé KF1 a KF2.K otevření cívek dojde před sepnutím blokovacího relé KV a cívka K1 nebude napájena. Reléové kontakty KF1 a KF2 se opět sepnou, když otáčky motoru dosáhnou synchronně přibližně 60-95 % v souladu s regulací relé.
Po sepnutí kontaktů relé KF1 sepne cívka stykače K1, jeho kontakty v hlavním obvodu zkratují rozběhové odpory Rp a stator se zapne na plné síťové napětí. Při sepnutí otevřených kontaktů relé KF2 se vytvoří obvod pro napájení cívky stykače K2, nezávisle na stykači K1 se jeho kontakt rozepne rychlostí přibližně 60 % synchronní rychlosti.
Stykač K2 má dvě vinutí: jedno hlavní, tažné KM1 a druhé vinutí KM2, určené k uvolnění zámku, který je opatřen stykačem. Po zapnutí navíjecí cívky KM1 se v budicím obvodu sepnou zapínací kontakty K2 a rozepnou se rozpínací kontakty K2, čímž dojde k odpojení vinutí rotoru od vybíjecích odporů R1 a R2 a připojení rotoru ke stejnosměrné síti.
Rýže. 3. Schéma řízení synchronního motoru
Kontakty stykače K2 pracují v následujícím pořadí. Spínací kontakt K2 se otevře v napájecím obvodu snímací cívky, ale blokovací činnost udržuje stykač pod napětím. Zapínací kontakty K2 se sepnou v napájecím obvodu dvou cívek a v obvodu cívky KM2 a připraví obvod pro následné sepnutí. Cívka K2 bude odpojena, jakmile se uvolní zajišťovací mechanismus z cívky KM2. Motor se odpojí od sítě stisknutím tlačítka SB1.Cívka K1 uvolní svůj rozpínací kontakt v obvodu cívky KM2, čímž se uvolní západka a cívka KM1 se vypne, načež se obvod vrátí do původní polohy.