Řízení motoru jako funkce proudu
 Řízení motoru lze provádět v závislosti na síle proudu statoru. Spouštěcí obvod jako funkce proudu indukčního motoru s vinutým rotorem je znázorněn na Obr. 1a.
Řízení motoru lze provádět v závislosti na síle proudu statoru. Spouštěcí obvod jako funkce proudu indukčního motoru s vinutým rotorem je znázorněn na Obr. 1a.
V okamžiku rozběhu dosáhne proud hodnoty I1 a po určitém časovém intervalu klesne na hodnotu I2 (obr. b). V tomto okamžiku dojde k automatickému zkratování části rozběhového odporu v obvodu rotoru, proud stoupne na hodnotu I1, poté opět klesne na hodnotu I2, což způsobí zkrat další části rozběhového odporu. Tento proces se opakuje, dokud nejsou všechny stupně startovacího odporu zkratovány. Pro tyto účely se používá nadproudové relé, jehož vinutí jsou součástí výkonového obvodu motoru.
Když kliknete na tlačítko Start SB1 (viz obr. A) je aktivován stykač KM, jehož hlavní kontakty spojují motor se sítí na společném rozběhovém odporu v obvodu rotoru. V tomto případě je napájena cívka relé KA, jejíž rozpínací kontakty jsou v obvodu cívky akcelerátoru K1.Relé KA je nastaveno tak, že doba odezvy je kratší než u stykače K1. Navíc jeho vypínací kontakty na maximální přípustnou hodnotu startovací proud rozepnou, a když proud klesne na spínací hodnotu, opět se sepnou, čímž se cívka K1 sepne přes kontakty relé KA v okamžiku zkratu stupně spouštěcího odporu.
Relé KA bude fungovat předtím, než se připojí zrychlovací stykač K1, a motor zrychlí, když je plně zaveden rozběhový odpor. Při poklesu rozběhového spínacího proudu se sepnou kontakty relé KA a sepne se cívka K1. Současně se sepne kontakt K1, který zajišťuje samonapájení cívky nezávisle na relé KA, a kontakt v řídicím obvodu se otevře, čímž se zabrání předčasnému zařazení urychlovače K2.
Protože jsou napájecí kontakty K1 součástí zkratu rozběhového odporu, statorový proud vzroste na maximální hodnotu a relé KA při aktivaci rozepne své kontakty v napájecím obvodu cívky K2. Když motor dosáhne dostatečných otáček a statorový proud klesne zpět na spínací proud, sepnou kontakty relé KA a sepnou cívku K2, která zkratuje druhý stupeň rozběhového odporu na jejích kontaktech.
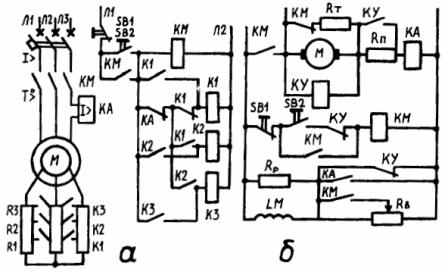
Rýže. 1. Řídicí obvody v závislosti na proudu: a — asynchronní motor s fázovým rotorem; b — Stejnosměrný motor s paralelním buzením
V tomto případě se statorový proud opět zvýší, relé KA sepne a otevře své kontakty. Cívka K2 neztratí napájení, protože bude mít čas se sepnout pomocí pomocných kontaktů K2.Další pokles proudu statoru po dalším zrychlení způsobí sepnutí vinutí K3 a zkratování posledního stupně rozběhového odporu. Stisknutím tlačítka SB se motor zastaví a okruh je připraven k dalšímu spuštění. Pomocí proudových relé nakonfigurovaných pro návrat při proudu 12 lze zastavit a obrátit různé elektrické pohony. Nevýhodou řídicích obvodů v proudové funkci je poměrně velký počet kontaktů.
Pro nevratné řízení paralelně buzeného stejnosměrného motoru o výkonu několika kilowattů lze použít jednostupňový spouštěcí reostat (viz obr. C). Schéma ukazuje: regulační odpor RB v budicím obvodu; vybíjecí odpor Rp zapojený paralelně s budicí cívkou LM; brzdný odpor RT zapojený paralelně s kotvou M při odpojení od sítě a rozběhový odpor RP zapojený sériově do obvodu kotvy během doby rozběhu. Pro dosažení maximálního toku při startu je LM budicí cívka ve výchozí poloze zapnuta na plné napětí.
Po stisku tlačítka SB2 je kotva motoru ze síťového stykače KM zapojena sériově do sítě s odporem RP Řídicí relé spouštěče SC pracuje v závislosti na proudu kotvy. Jak se proud zvyšuje, uzavírací kontakt KA manipuluje s odporem RB, čímž se zvyšuje budicí magnetický tok, a když se proud snižuje, kontakt KA se otevírá a LM cívka je zapojena do série s odporem reostatu RB, v důsledku kterým magnetický proud klesá.
Když se motor spustí, zvýšený startovací proud kotvy zapne relé KA a LM cívka vytvoří maximální tok. Při dosažení určité rychlosti se sepne zrychlovací stykač K, rozběhový odpor RP se zkratuje, načež motor pracuje podle svých přirozených charakteristik. Při poklesu proudu kotvy (v důsledku zrychlení motoru) před přivedením napětí do relé KA dojde k rozepnutí kontaktu KA v budicím obvodu.
LM vinutí se zapne v sérii s odporem RB, což způsobí zeslabení toku pole a odpovídajícímu zvýšení proudu kotvy. Relé KA opět sepne, zvýší tok a současně zvýší otáčky motoru. Během spouštění se relé kosmické lodi několikrát spustí, dokud motor nedosáhne rychlosti nastavené řídicím reostatem RB. Takové vibrační zařízení fungující jako proudová funkce zjednodušuje obvod ve srovnání s řídicími obvody jako funkce času.
Při zapnutí motoru stisknutím tlačítka SB1 se zapne kotva od rozpínacího kontaktu KM po brzdný odpor RT a automaticky se provede dynamické brzdění. Na začátku dorazu je magnetické pole vlivem rozepnutí KM kontaktu na jezdci regulačního reostatu mírně zeslabeno a budicí proud prochází celým odporem RB. Jak otáčky motoru dále klesají, stykač zrychlení K je bez napětí a tok se zvyšuje, když je budicí cívka zapnuta na plné síťové napětí přes rozpínací kontakt K, což má za následek zvýšení brzdného momentu.