Intuitivní metoda pro navrhování schémat ovládání
 Intuitivní metoda — metoda vývoje řídicích schémat na základě zkušeností získaných v různých projekčních organizacích při automatizaci různých mechanismů. Vychází z konstruktérovy inženýrské intuice.
Intuitivní metoda — metoda vývoje řídicích schémat na základě zkušeností získaných v různých projekčních organizacích při automatizaci různých mechanismů. Vychází z konstruktérovy inženýrské intuice.
Tuto metodu může dokonale ovládat pouze ten, kdo vstřebal všechny předchozí zkušenosti a má určité schopnosti v oblasti kreslení schémat, kdo umí myslet abstraktně a logicky uvažovat. Navzdory své složitosti většina návrhářů elektrotechniky intuitivní metodu široce používá.
Uvažujme například zjednodušené kinematické schéma tlačné páky (obr. 1). Když se kolo 5 otáčí ve směru hodinových ručiček, páka 4 otáčí pákou 1 kolem osy O, čímž nutí botu 3 s pákou 2 k posunutí. Při dalším otáčení kola 5 se změní směr pohybu páky 1 a botka se vrátí do původní polohy, po které se motor musí zastavit.
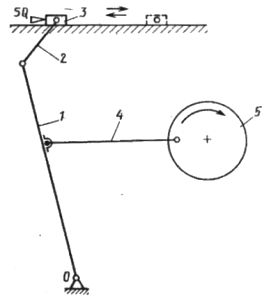
Rýže. 1. Schematické schéma ovládání pákového tlačníku
Uvažovaný mechanismus je typickým představitelem tlačného zařízení.V prvním cyklu je mechanismus zapnutý a běží. Ve druhém opatření to nefunguje. Cyklus, ve kterém mechanismus nefunguje, se nazývá nulový. Přestože je bota plně vratná (vpřed i vzad), lze k pohonu použít nereverzní elektromotor.
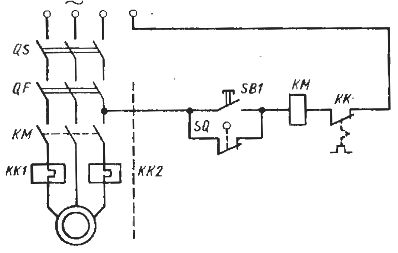
Řídicí obvod elektromotoru páka-píst se skládá ze dvou částí (na obr. 1 jsou odděleny tečkovanou čarou): silového obvodu a řídicího obvodu.
Zvažte účel prvků silového obvodu. Třífázový proud je přiváděn do spínače QS, který v případě opravy nebo poškození magnetického startéru přeruší napájení elektromotoru. Poté proud protéká jističem, jehož spouště QF je znázorněna ve schématu. Je určen k ochraně a odpojení napájení měniče v případě zkratových proudů. Hlavní kontakty magnetického startéru KM zapínají nebo vypínají vinutí elektromotoru M.
Tepelná relé KK1 a KK2, jejichž topná tělesa jsou zobrazena v silových obvodech, jsou určena k ochraně elektromotoru před dlouhodobým přetížením:
Schéma ovládání funguje následovně. Po stisku startovacího tlačítka SB1 dojde k nabuzení cívky magnetického spouštěče KM a tím k sepnutí kontaktů napájecího obvodu KM a do vinutí motoru vstupuje elektrický proud. Rotor motoru se otočí a buben se začne pohybovat dopředu. Zároveň se oddálí od páky koncového spínače SQ a sepnou se jeho kontakty.
Po uvolnění spouštěcího tlačítka SB1 a otevření jeho kontaktů bude cívka KM magnetického spouštěče napájena přes kontakty koncového spínače SQ.Po pohybu dopředu a poté dozadu píst stiskne páku koncového spínače SQ, jeho kontakty se rozepnou a cívka KM se vypne. To způsobí otevření kontaktů KM v napájecím obvodu a zastavení elektromotoru.
Uvažovaný obvod obsahuje napájecí a řídicí obvody. V budoucnu budou zvažována pouze kontrolní schémata.
Podle funkce, tzn. podle účelu lze všechny prvky zapojené do provozu obvodu rozdělit do tří skupin: ovládací kontakty, mezilehlé prvky a výkonné prvky.
Ovládací kontakty jsou prvky, pomocí kterých jsou vydávány příkazy (ovládací tlačítkaspínače, koncové spínače, primární měniče, reléové kontakty atd.).
Samotný název mezičlánků naznačuje, že zaujímají mezilehlou pozici mezi ovládacími a výkonnými prvky. V reléových kontaktních obvodech zahrnují časová relé a mezilehlá relé a v bezkontaktních obvodech — logická hradla.
Výkonné prvky jsou výkonné mechanismy. Při vývoji řídicích obvodů se však nepoužívají samotné pohonné mechanismy (elektromotory nebo topná tělesa), ale zařízení, která je obsahují, tzn. magnetické spouštěče, stykače atd.
Všechny ovládací kontakty jsou podle svého funkčního principu rozděleny do pěti typů: spouštěcí kontakt s krátkou akcí (PC), spouštěcí kontakt s dlouhou akcí (PD), vypínací kontakt s krátkou akcí (OK), zastavovací kontakt s dlouhou akcí (OD ), kontakt start-stop (software). Tyto kontakty se nazývají hlavní.
Cyklogramy činnosti všech typických kontaktů při řízení cyklických mechanismů jsou na obr. 2.
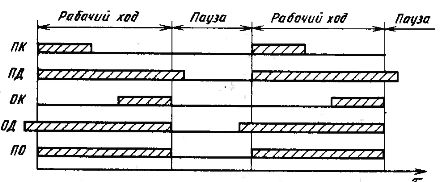
Rýže. 2.Cyklogram ovládacích kontaktů
Každý z pěti kontaktů začne fungovat (sepne) a skončí (otevře se) v určitém časovém okamžiku. Spouštěcí kontakty tedy začnou pracovat společně se začátkem pracovního zdvihu, ale kontakt YAK přestane fungovat během pracovního zdvihu, OD — během pauzy, to znamená, že se od sebe liší pouze v okamžicích vypnutí ( otevření).
Dorazové kontakty, které na rozdíl od spouštěcích kontaktů přestanou fungovat současně s koncem pracovního zdvihu, se liší v momentech zařazení (sepnutí). Stop kontakt OK zahájí činnost během pracovního zdvihu a kontakt OD - během pauzy. Teprve kontakt softwaru začíná svou práci společně se začátkem pracovního průběhu a končí jeho koncem.
Pomocí uvažovaných pěti hlavních kontaktů je možné získat čtyři schémata ovládání výkonných a mezilehlých prvků, která se nazývají typická schémata (obr. 3).

Rýže. 3. Typická řídicí schémata pro výkonné a meziobvody
První typický obvod (obr. 3, a) má pouze jeden softwarový ovládací kontakt. Pokud je zavřený, teče elektrický proud akčním členem X, a pokud je otevřený, neteče žádný proud. Kontakt PO má svůj význam a všechny ostatní kontakty je nutné používat v páru (start a stop).
Druhý typický obvod má dva ovládací kontakty s plynulou činností: PD a OD (obr. 3, b).
Třetí typický obvod se skládá ze spouštěcího kontaktu počítače a zastavovacího kontaktu OD, kromě ovládacích kontaktů by tento obvod měl obsahovat blokovací kontakt x, přes který bude akční člen X nadále napájen po spouštěcím kontaktu počítač se otevře (obr. 3, c).
Čtvrté typické schéma je založeno na dvou krátkodobých kontaktech: spuštění počítače a zastavení OK, paralelně připojené (obr. 3, d).
Uvedená čtyři typická schémata umožňují (jakoby z kostek) sestavit složitá paralelně-sériová schémata pro ovládání kontaktů. Takže například uvažované schéma ovládání páky (viz obr. 1) je založeno na čtvrtém typickém schématu. Používá tlačítka SB1 jako krátkodobý spouštěcí kontakt a koncový spínač SQ jako krátkodobý stop kontakt.
Při sestavování schématu ovládání pomocí intuitivní metody je nutné správně určit typ ovládacího kontaktu, to znamená dobu jeho působení.
Zvažte příklad vývoje schématu ovládání pomocí intuitivní metody s použitím typických schémat.
Budiž třeba vyvinout poloautomatické zařízení pro ovládání induktoru a zařízení pro stříkání zařízení určeného k ohřevu výrobku vysokofrekvenčními proudy a jeho následnému chlazení vodními tryskami. Doba ohřevu produktu v induktoru je 12 s a doba chlazení je 8 h. Produkt se do induktoru instaluje ručně.
Nejprve rozebereme činnost poloautomatického zařízení a určíme všechny výkonné a mezilehlé prvky. Pracovník ručně nainstaluje produkt do induktoru a stiskne tlačítko start.V tomto okamžiku se induktor zapne a začne ohřev produktu. Současně by se mělo sepnout i časové relé s ohledem na dobu ohřevu (12 s).
Toto časové relé (přesněji jeho kontakty) vypíná induktor a zapíná sprinkler, který dodává vodu pro chlazení. Zároveň musí být sepnuto druhé relé pro odpočítávání doby chlazení, tedy pro vypnutí postřikovače. Tímto způsobem je nutné ovládat čtyři prvky: induktor, rozprašovací zařízení a dvě časová relé.
Tlumivka se zapíná a vypíná přes stykač, proto je nutné jej ovládat. Postřikovač je ovládán elektromagnetickým ventilem.
Označme cívku (cívku) stykače KM1, cívku solenoidového ventilu KM2 a cívky časového relé KT1 a K.T2. Máme tedy dva akční členy: KM1 a KM2 a dva mezičlánky: KT1 a KT2.
Z provedené analýzy vyplývá, že nejprve by se mělo spustit ohřívání, to znamená, že cívka KM1 bude vybuzena. Spouštěcí tlačítko SB (krátké působení) se používá jako spouštěcí kontakt. Lze tedy použít třetí nebo čtvrté typické schéma.
Nechte induktor odpojit od kontaktů časového relé KT1.1, což jsou v tomto případě kontakty s dlouhým účinkem. Proto volíme třetí typické schéma. Současně s vinutím magnetického spouštěče KM1 je nutné sepnout časové relé KT1, což lze velmi snadno provést jejich paralelním zapojením.
Zvažte činnost výsledného obvodu (obr. 4, a).
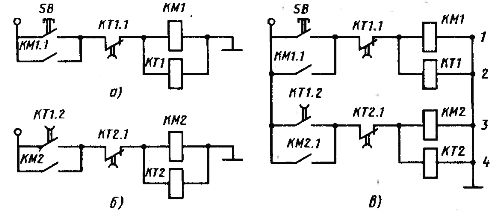
Rýže. 4.Řídicí obvody: a — induktor a relé pro dobu ohřevu, b — sprinklerové zařízení a doba chlazení relé, c – instalace jako celek
Když stisknete startovací tlačítko SB, cívka stykače KM1 je pod napětím, to znamená, že se začne ohřívat produkt. Současně se připojí cívka časového relé KT1 a začne odpočítávat dobu ohřevu. Pomocí blokovacího kontaktu KM1.1 bude zachováno napětí cívky KM1 i po uvolnění spouštěcího tlačítka SB, tzn. po otevření jeho kontaktů.
Po uplynutí doby ohřevu sepne časové relé KT1, jeho kontakt KT1.1 se rozepne. To způsobí vypnutí cívky KM1 (zahřívání produktu skončí). Nyní by měl být rozprašovač zapnutý. Lze jej sepnout časovým relé KT1 sepnutím kontaktu. Po zapnutí postřikovače je časové relé KT1 vypnuto. Proto bude zapínací kontakt KT1.1 krátkodobý kontakt. Proto opět použijeme třetí typické schéma.
Současně s postřikovačem je nutné sepnout časové relé KT2, které odpočítává dobu chlazení. K tomuto účelu použijeme aplikovanou techniku a cívku časového relé KT2 zapojíme paralelně s cívkou KM2. Získáme tak druhé schéma ovládání (obr. 4, b). Kombinací dvou obvodů (obr. 4, aab) získáme obecné schéma ovládání (obr. 4, c).
Uvažujme nyní činnost obvodu jako celku (obr. 4, c). Když stisknete tlačítko SB start, cívky stykače KM1 a časového relé KT1 se aktivují a výrobek se začne zahřívat.Po 12 s sepne časové relé KT1 a jeho kontakty v okruhu 1 se rozepnou a v okruhu 2 sepnou. Produkt začne chladnout. Současně s cívkou KM2 elektromagnetického ventilu bude sepnuto časové relé K, které bude odpočítávat dobu ochlazování. Když se rozepne kontakt KT2.1 (obvod 3), ventil KM2 a časové relé KT2 se vypnou a obvod se vrátí do původní polohy.
Výsledné schéma ovládání induktoru a sprinkleru bylo vyvinuto pomocí intuitivní metody. Neexistuje však žádný důkaz, že toto schéma bude správné a optimální. Otázku provozuschopnosti obvodu lze vyřešit až po jeho výrobě a pečlivém experimentálním ověření. To je právě největší nevýhoda intuitivní metody. Uvedený nedostatek v analytické metodě chybí. Analytická metoda pro vývoj regulačních schémat bude diskutována v dalším článku.