Typická schémata spouštění synchronních elektromotorů
Synchronní motory jsou široce používány v průmyslu pro elektrické pohony pracující s konstantními otáčkami (kompresory, čerpadla atd.). V poslední době byly díky nástupu spínací polovodičové technologie vyvinuty řízené synchronní elektrické pohony.
Výhody synchronních motorů
Synchronní motor je o něco složitější než asynchronní motor, ale má řadu výhod, díky kterým je možné jej v některých případech použít místo asynchronního.
1. Hlavní výhodou synchronního elektromotoru je schopnost získat optimální režim pro jalovou energii, který se provádí automatickým nastavením budícího proudu motoru. Synchronní motor může pracovat bez spotřeby nebo dodávky jalové energie do sítě při účiníku (cos fi) rovném jednotce. Pokud podnik potřebuje generovat jalový výkon, pak jej do sítě může dodat synchronní motor pracující s přebuzením.
2.Synchronní motory jsou méně citlivé na kolísání síťového napětí než asynchronní motory. Jejich maximální moment je úměrný síťovému napětí, zatímco kritický moment indukčního motoru je úměrný druhé mocnině napětí.
3. Synchronní motory mají vysokou přetížitelnost. Přetížitelnost synchronního motoru lze navíc automaticky zvýšit zvýšením budícího proudu, např. při náhlém krátkodobém zvýšení zatížení hřídele motoru.
4. Rychlost otáčení synchronního motoru zůstává nezměněna pro jakékoli zatížení hřídele v rámci jeho přetížitelnosti.
Způsoby spouštění synchronního motoru
Možné jsou tyto způsoby spouštění synchronního motoru: asynchronní spouštění při plném síťovém napětí a spouštění při nízkém napětí přes tlumivku popř. autotransformátor.
Rozběh synchronního motoru se provádí jako asynchronní rozběh. Vnitřní rozběhový moment synchronního stroje je malý, zatímco u stroje s implicitním pólem je nulový. Pro vytvoření asynchronního krouticího momentu je rotor vybaven rozběhovou klecí nakrátko, jejíž tyče jsou zasunuty do drážek pólového systému. (Samozřejmě u motoru s vyčnívajícími póly nejsou žádné tyče mezi póly.) Stejný článek přispívá ke zvýšení dynamické stability motoru při špičkách zatížení.
Díky asynchronnímu momentu se motor rozběhne a zrychlí. Při zrychlování není ve vinutí rotoru žádný budicí proud.Stroj se spustí bez buzení, protože přítomnost vybuzených pólů by komplikovala proces zrychlení a vytvořila by brzdný moment podobný jako u indukčního motoru při dynamickém brzdění.
Když se tzv Subsynchronní otáčky, které se liší od synchronních o 3 - 5 %, proud je přiváděn do budicí cívky a motor je po několika oscilacích kolem rovnovážné polohy přitahován k synchronismu. Motory s odkrytými póly jsou kvůli jalovému momentu při nízkých točivých momentech hřídele někdy synchronizovány, aniž by dodávaly proud do budicí cívky.
U synchronních motorů je obtížné zajistit současně požadované hodnoty rozběhového momentu a vstupního momentu, kterým se rozumí asynchronní moment vznikající při otáčkách 95 % synchronních otáček. V souladu s charakterem závislosti statického momentu na otáčkách, tzn. v souladu s typem mechanismu, pro který je motor konstruován, musí být ve výrobnách elektrických strojů změněny parametry spouštěcího článku.
Někdy, aby se omezily proudy při spouštění výkonných motorů, je napětí na svorkách statoru sníženo, včetně sériových vinutí autotransformátoru nebo odporů. Je třeba mít na paměti, že při spuštění synchronního motoru je obvod budícího vinutí uzavřen na velký odpor, který 5-10krát překračuje odpor samotného vinutí.
V opačném případě při působení proudů indukovaných ve vinutí během spouštění dochází k pulzujícímu magnetickému toku, jehož zpětná složka v interakci s proudy statoru vytváří brzdný moment.Tento točivý moment dosahuje maximální hodnoty při otáčkách mírně nad polovinou jmenovitých a pod jeho vlivem může motor v těchto otáčkách zastavit akceleraci. Ponechání otevřeného obvodu pole během startování je nebezpečné, protože izolace vinutí může být poškozena v ní indukovaným EMF.
Vzdělávací filmový pás - „Synchronous Motors“ vyrobený továrnou na vzdělávací materiály v roce 1966. Můžete si jej prohlédnout zde: Filmový pás «Synchronous Motor»

Asynchronní start synchronního elektromotoru
Budicí obvod synchronního motoru s naslepo připojeným budičem je vcelku jednoduchý a lze jej použít, pokud zapínací proudy nezpůsobí úbytek napětí v síti větší než je přípustný a statistický moment Ms <0,4 Mnom.
Asynchronní start synchronního motoru se provádí připojením statoru k síti. Motor je zrychlen jako indukční motor na rychlost otáčení blízkou synchronní.
V procesu asynchronního spouštění je budicí vinutí uzavřeno na vybíjecí odpor, aby se zabránilo zničení budícího vinutí při spouštění, protože při nízkých otáčkách rotoru se v něm mohou vyskytovat významná přepětí. Při otáčkách blízkých synchronním se spustí stykač KM (na schématu není znázorněn napájecí obvod stykače), odpojí se budicí cívka od vybíjecího odporu a připojí se na kotvu budiče. Začátek končí.
 Typické jednotky synchronních budicích obvodů motoru používajících tyristorové budiče ke spouštění synchronních motorů
Typické jednotky synchronních budicích obvodů motoru používajících tyristorové budiče ke spouštění synchronních motorů
Slabinou většiny elektrických pohonů se synchronními motory, která značně komplikuje provoz a prodražuje, je již řadu let budič elektrických strojů. V dnešní době jsou široce používány k buzení synchronních motorů. tyristorové budiče… Dodávají se jako sada.
Tyristorové budiče synchronních elektromotorů jsou spolehlivější a mají vyšší účinnost. ve srovnání s budiči elektrických strojů. S jejich pomocí jsou snadno vyřešeny otázky o optimální regulaci budícího proudu pro udržení stálosti. cos phi, napětí přípojnic, ze kterých je napájen synchronní motor, a také omezení rotorového a statorového proudu synchronního motoru v nouzových režimech.
Tyristorové budiče jsou vybaveny většinou vyráběných velkých synchronních elektromotorů. Obvykle plní následující funkce:
- spouštění synchronního motoru se spouštěcím odporem zahrnutým v obvodu budicího vinutí,
- bezkontaktní vypnutí rozběhového odporu po skončení rozběhu synchronního motoru a jeho ochrana před přehřátím,
- automatické napájení buzení ve vhodném okamžiku rozběhu synchronního elektromotoru,
- automatické a ruční nastavení budícího proudu
- nutné nucené buzení v případě hlubokých poklesů napětí na statoru a prudkých skoků zátěže na hřídeli synchronního motoru,
- rychlé zhasnutí pole synchronního motoru, když je nutné snížit budicí proud a vypnout elektromotor,
- ochrana rotoru synchronního motoru proti trvalému nadproudu a zkratům.
Pokud se synchronní elektromotor spouští při sníženém napětí, pak při «lehkém» startu je buzen, dokud se vinutí statoru nezapne na plné napětí a při «těžkém» startu je buzení dodáváno plným napětím v obvodu statoru. Budicí vinutí motoru je možné zapojit do série s vybíjecím odporem ke kotvě budiče.
Proces dodávání buzení do synchronního motoru je automatizován dvěma způsoby: jako funkce rychlosti a jako funkce proudu.
Budicí systém a ovládací zařízení pro synchronní motory musí poskytovat:
- spouštění, synchronizace a zastavení motoru (s automatickým buzením na konci startu);
- nucené buzení s faktorem ne menším než 1,4 při poklesu síťového napětí na 0,8Un;
- možnost kompenzovat motorem jalový výkon spotřebovaný (daný) sousedními elektrickými přijímači v rámci tepelných možností motoru;
- zastavení motoru v případě poruchy v budicím systému;
- stabilizace budícího proudu s přesností 5 % nastavené hodnoty při změně síťového napětí z 0,8 na 1,1;
- regulace buzení odchylkou napětí statoru s mrtvou zónou 8%;
- při změně napájecího napětí statoru synchronního motoru z 8 na 20 % se proud změní z nastavené hodnoty na 1,4 In, čímž se zvýší budicí proud pro zajištění maximálního přetížení motoru.
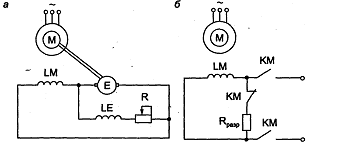
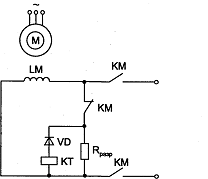
Ve schématu uvedeném na obrázku je buzení přiváděno do synchronního motoru pomocí stejnosměrného elektromagnetického relé KT (Sleeving Time Relay).Cívka relé je připojena k vybíjecímu odporu Rdisc přes VD diodu. Když je statorové vinutí připojeno k síti, indukuje se emf ve vinutí buzení motoru. Cívkou relé KT protéká stejnosměrný proud, jehož amplituda a frekvence pulzů závisí na skluzu.
 Napájení buzení do synchronního motoru v závislosti na otáčkách
Napájení buzení do synchronního motoru v závislosti na otáčkách
Při rozběhu skluz S = 1. Jak motor zrychluje, klesá a intervaly mezi korigovanými půlvlnami proudu se zvyšují; magnetický tok postupně klesá podél křivky Ф (t).
Při rychlosti blízké synchronní stihne magnetický tok relé dosáhnout hodnoty odpadového toku relé Fot v okamžiku, kdy proud neprochází relé KT. Relé ztrácí napájení a přes svůj kontakt vytváří silový obvod stykače KM (na schématu není silový obvod stykače KM znázorněn).
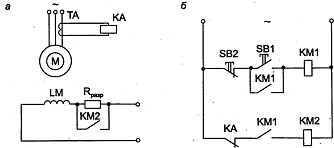
Zvažte ovládání napájení v proudové funkci pomocí proudového relé. Rozběhovým proudem se aktivuje proudové relé KA a rozepne svůj kontakt v obvodu stykače KM2.
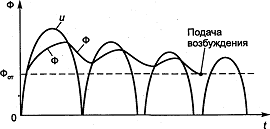
Graf změn proudu a magnetického toku v časovém relé KT
 Sledování buzení synchronního motoru jako funkce proudu
Sledování buzení synchronního motoru jako funkce proudu
Při rychlosti blízké synchronní relé KA zmizí a sepne svůj kontakt v obvodu stykače KM2. Stykač KM2 se aktivuje, sepne svůj kontakt v budicím obvodu stroje a přepne rezistor Rres.