Elektrické stroje na střídavý proud
Elektrické stroje slouží k přeměně mechanické energie na elektrickou energii (AC a DC generátory) a naopak (elektromotory).
Ve všech těchto případech se využívají v podstatě tři hlavní objevy v oblasti elektromagnetismu: fenomén mechanické interakce proudů objevený Amperem v roce 1821, fenomén elektromagnetické indukce objevený Faradayem v roce 1831 a teoretické shrnutí těchto jevů učiněné Lenz (1834) ve svém známém zákonu směru indukovaného proudu (ve skutečnosti Lenzův zákon předpovídal zákon zachování energie pro elektromagnetické procesy).

Pro přeměnu mechanické energie na elektrickou nebo naopak je nutné vytvořit relativní pohyb vodivého obvodu s proudem a magnetickým polem (magnetem nebo proudem).
U elektrických strojů určených pro nepřetržitý provoz se využívá otáčivý pohyb pohyblivé části stroje (rotor střídavého stroje) umístěné uvnitř stacionární části (statoru).Cívka stroje, která slouží k vytvoření magnetického pole, se nazývá induktor a cívka, která obtéká pracovním proudem, se nazývá kotva. Oba tyto poslední termíny se také používají pro stejnosměrné stroje.
Pro zvýšení magnetické indukce jsou vinutí strojů umístěna na feromagnetických tělesech (ocel, litina).
Všechny elektrické stroje mají vlastnost reverzibility, to znamená, že je lze použít jako generátory elektrické energie i jako elektromotory.

Asynchronní motory
Používají se asynchronní motory jeden z projevů elektromagnetické indukce… V kurzech fyziky se to demonstruje takto:
Pod měděným kotoučem, který se může otáčet kolem svislé osy procházející jeho středem, je umístěn svislý podkovovitý magnet poháněný k otáčení kolem stejné osy (mechanická interakce mezi kotoučem a magnetem je vyloučena). V tomto případě se disk začne otáčet stejným směrem jako magnet, ale nižší rychlostí. Pokud zvýšíte mechanické zatížení disku (například zvýšením tření osy o axiální ložisko), sníží se rychlost jeho otáčení.
Fyzikální význam tohoto jevu lze snadno vysvětlit teorií elektromagnetické indukce: když se magnet otáčí, vytváří se rotující magnetické pole, které indukuje vířivé proudy v disku, jehož velikost závisí, za jinak stejných okolností, na relativní rychlost pole a disku.
Podle Lenzova zákona se kotouč musí otáčet ve směru pole. Při absenci tření musí disk získat úhlovou rychlost rovnou rychlosti magnetu, po které indukované emf zmizí. V reálném životě je tření nevyhnutelně přítomno a disk se zpomaluje.Jeho velikost závisí na mechanickém brzdném momentu, který disk zažívá.
Nesoulad mezi rychlostí otáčení disku (rotoru) a rychlostí otáčení magnetického pole se odráží v názvu motorů.
Princip činnosti asynchronních motorů:
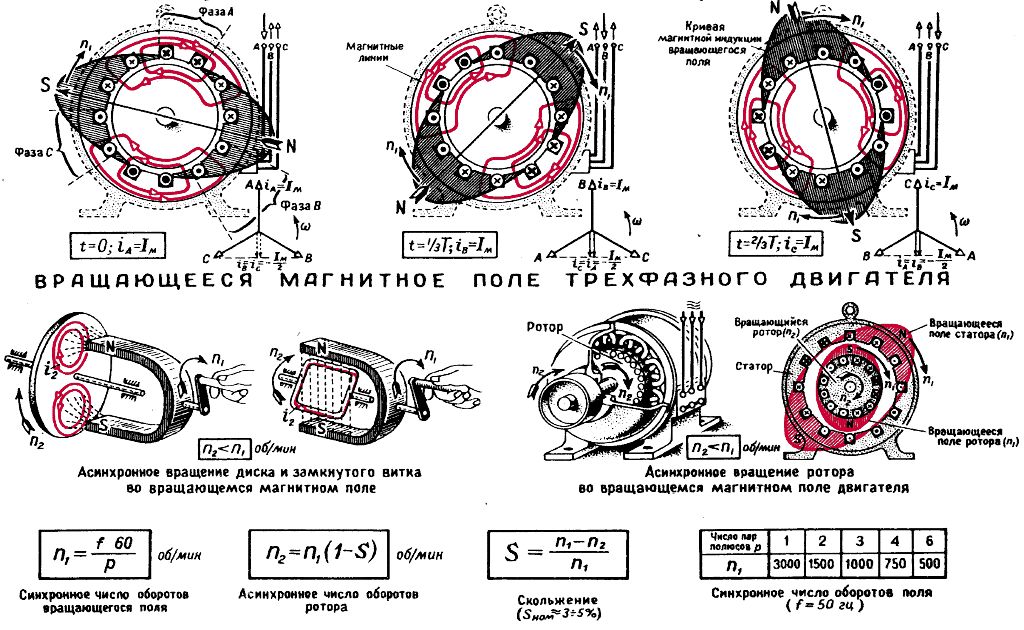
U technických asynchronních motorů (nejčastěji třífázových) vzniká točivé magnetické pole vícefázový proudproudící kolem stacionárního vinutí statoru. Při frekvenci třífázového proudu je a počtu cívek statoru 3p točivé pole činí n = f/p otáček/sec.

V dutině statoru je umístěn otočný rotor. K jeho hřídeli lze připojit otočný mechanismus.U nejjednodušších motorů typu „vevercell“ je rotor tvořen soustavou podélných kovových tyčí uložených v drážkách ocelového válcového tělesa. Vodiče jsou zkratovány dvěma kroužky. Pro zvýšení točivého momentu je poloměr rotoru vyroben dostatečně velký.
U jiných konstrukcí motorů (typicky vysoce výkonné motory) tvoří dráty rotoru otevřené třífázové vinutí. Konce cívek jsou zkratovány v samotném rotoru a přívody jsou vyvedeny na tři sběrací kroužky namontované na hřídeli rotoru a izolované od ní.
K těmto kroužkům je pomocí posuvných kontaktů (kartáčů) připojen třífázový reostat, který slouží ke spuštění motoru do pohybu. Po otočení motoru je reostat zcela odstraněn a rotor se stává klec nakrátko (viz — Asynchronní motory s vinutým rotorem).

Na tělese statoru je svorkovnice. K nim jsou vyvedena statorová vinutí. Mohou být zahrnuty hvězda nebo trojúhelník, v závislosti na síťovém napětí: v prvním případě může být síťové napětí 1,73krát vyšší než ve druhém.
Nazývá se hodnota charakterizující relativní zpomalení rotoru oproti statorovému poli asynchronního motoru uklouznutí… Mění se ze 100 % (v okamžiku spuštění motoru) na nulu (ideální případ bezztrátového pohybu rotoru).
Obrácení směru otáčení asynchronního motoru je dosaženo vzájemným přepínáním každých dvou lineárních vodičů elektrické sítě napájející motor.

Motory s veverkovou klecí jsou široce používány v průmyslu. Výhodou asynchronních motorů je jednoduchost konstrukce a absence kluzných kontaktů.
Donedávna byla hlavní nevýhodou takových motorů obtížnost regulace otáček, protože pokud se kvůli tomu změní napětí obvodu statoru, pak se točivý moment prudce změní, ale bylo technicky obtížné změnit frekvenci napájecího proudu. Moderní mikroprocesorová zařízení jsou nyní široce používána k řízení frekvence napájecího proudu pro změnu rychlosti motorů — frekvenční měniče.
Alternátory
Alternátory jsou konstruovány pro značný výkon a vysoké napětí. Stejně jako asynchronní stroje mají dvě vinutí. Normálně je vinutí kotvy umístěno v tělese statoru. Induktory, které vytvářejí primární magnetický tok, jsou namontovány na rotoru a jsou napájeny budičem – malým stejnosměrným generátorem namontovaným na hřídeli rotoru. U vysoce výkonných strojů je buzení někdy vytvářeno usměrněným střídavým napětím.
Vzhledem k nehybnosti vinutí kotvy mizí technické potíže spojené s použitím kluzných kontaktů při vysokých výkonech.
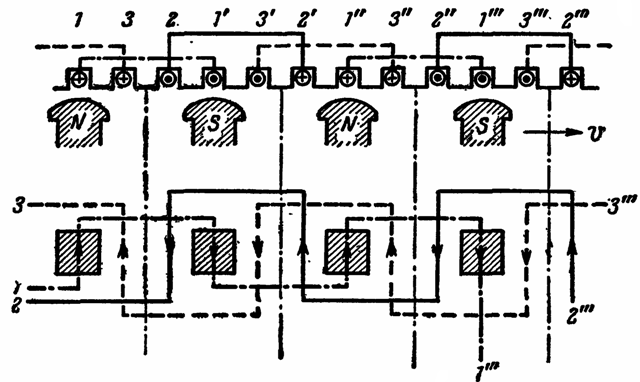
Níže uvedený obrázek ukazuje schéma jednofázového generátoru. Jeho rotor má osm pólů. Na nich jsou navinuté cívky (na obrázku neznázorněné) napájené z externího zdroje stejnosměrným proudem aplikovaným na sběrací kroužky namontované na hřídeli rotoru. Cívky pólů jsou navinuty tak, že se střídají znaky pólů přivrácených ke statoru. Počet pólů musí být sudý.
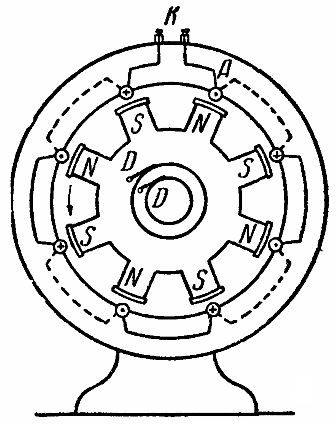
Vinutí kotvy je umístěno v tělese statoru. Jeho dlouhé pracovní «aktivní» dráty, kolmé k rovině výkresu, jsou na obrázku znázorněny kroužky, při otáčení rotoru je protínají čáry magnetické indukce.
Kroužky znázorňují okamžité rozložení směrů indukovaných elektrických polí. Připojovací vodiče vedoucí podél přední strany statoru jsou znázorněny plnými čarami a na zadní straně přerušovanými čarami. Svorky K slouží k připojení vnějšího obvodu k vinutí statoru. Směr otáčení rotoru je označen šipkou.
Pokud mentálně oříznete stroj podél poloměru procházejícího mezi svorkami K a otočíte jej do roviny, pak bude relativní poloha vinutí statoru a pólů rotoru (strana a půdorys) znázorněna schematickým nákresem:
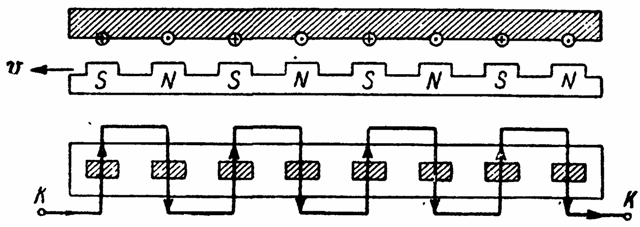
Vzhledem k obrázku dbáme na to, aby všechny aktivní vodiče (procházející póly induktoru) byly vzájemně zapojeny do série a sečetly se v nich indukované EMF. Fáze všech EMP jsou zjevně stejné.Během jedné úplné rotace rotoru se získají čtyři kompletní periody změny proudu v každém z vodičů (a tedy ve vnějším obvodu).
Pokud má elektrický stroj p párů pólů a rotor se otáčí n otáčkami za sekundu, pak frekvence střídavého proudu přijímaného strojem je f = pn hz.
Protože frekvence EMF v síti musí být konstantní, rychlost otáčení rotorů musí být konstantní. Pro získání EMF technické frekvence (50 Hz) lze použít relativně pomalou rotaci, pokud je počet pólů rotoru dostatečně velký.
Pro získání třífázového proudu jsou v tělese statoru umístěna tři samostatná vinutí. Každý z nich je vůči ostatním dvěma posunut o třetinu obloukové vzdálenosti mezi sousedními (protilehlými) póly induktorů.
Je snadné ověřit, že když se induktory otáčejí, indukují se EMF v cívkách posunutých ve fázi (v čase) o 120 °. Konce cívek jsou vyjmuty ze stroje a mohou být zapojeny do hvězdy nebo trojúhelníku.
V generátoru je relativní rychlost pole a vodiče určena průměrem rotoru, počtem otáček rotoru za sekundu a počtem pólových párů.

Pokud je generátor poháněn vodním proudem (hydrogenerátor), je obvykle vyroben s pomalými otáčkami. Pro získání požadované proudové frekvence je nutné zvýšit počet pólů, což zase vyžaduje zvětšení průměru rotoru.
Z řady technických důvodů výkonné vodíkové generátory obvykle mají vertikální hřídel a jsou umístěny nad hydraulickou turbínou, což způsobuje jejich otáčení.

Generátory poháněné parní turbínou — Turbínové generátory jsou obvykle vysokorychlostní. Aby se snížily mechanické síly, mají malé průměry a tomu odpovídající malý počet pólů.Řada technických úvah vyžaduje výrobu turbínových generátorů s horizontálním hřídelem.
Pokud je generátor poháněn spalovacím motorem, nazývá se dieselový generátor, protože dieselové motory se obecně používají jako motory, které spotřebovávají levnější palivo.

Reverzibilita generátoru, synchronní motory
Pokud je na statorové vinutí generátoru přivedeno střídavé napětí z vnějšího zdroje, dojde k interakci pólů induktoru s magnetickým polem proudu generovaného ve statoru a budou působit točivé momenty ze stejného směru. na všech pólech.
Pokud se rotor otáčí takovou rychlostí, že krátce po polovině periody střídavého proudu se další pól induktoru (ve znaménku opačně k prvnímu pólu) vejde pod uvažovaný drát statorového vinutí, pak se znaménko síla interakce mezi ním a proudem, který změnil svůj směr, zůstane stejná.
Za těchto podmínek se rotor, který je pod neustálým vlivem točivého momentu, bude nadále pohybovat a bude schopen pohánět jakýkoli mechanismus. K překonání odporu vůči pohybu rotoru dojde v důsledku energie spotřebované sítí a generátor se stane elektromotorem.

Je však třeba poznamenat, že kontinuální pohyb je možný pouze při přesně definované rychlosti otáčení, protože v případě odchylky od ní bude na každý z pólů rotoru částečně působit zrychlující moment, pohybující se mezi dvěma vodiči rotoru. stator, část času - zastavení .
Rychlost otáčení motoru tedy musí být přesně stanovena, — doba, po kterou je pól nahrazen dalším, se musí shodovat s půlperiodou proudu, proto se takové motory nazývají synchronně.
Je-li na vinutí statoru přivedeno střídavé napětí se stacionárním rotorem, pak, ačkoliv všechny póly rotoru během první půlperiody proudu procházejí působením točivých momentů stejného znaménka, stále, vlivem setrvačnosti, rotor nebude mít čas se pohybovat. V dalším půlcyklu se znaménko momentů pro všechny póly rotoru změní na opačné.
V důsledku toho bude rotor vibrovat, ale nebude se moci otáčet. Proto je třeba synchronní motor nejprve navinout, to znamená uvést na normální počet otáček, a teprve poté zapnout proud ve vinutí statoru.
Vývoj synchronních motorů se provádí mechanickými metodami (při malých výkonech) a speciálními elektrickými zařízeními (při vysokých výkonech).
Při malých změnách zátěže se rychlost motoru automaticky změní, aby se přizpůsobila nové zátěži. Takže když se zatížení hřídele motoru zvýší, rotor se okamžitě zpomalí. Proto se mění fázový posun mezi síťovým napětím a opačně indukovaným EMF indukovaným induktorem ve vinutí statoru.
Reakce kotvy navíc vytváří demagnetizaci tlumivek, takže statorový proud se zvyšuje, tlumivky zažívají zvýšený krouticí moment a motor se opět začíná synchronně otáčet, čímž překonává zvýšenou zátěž. Podobný proces nastává při snižování zátěže.
Při prudkém kolísání zátěže může být tato adaptabilita motoru nedostatečná, výrazně se změní jeho otáčky, „vypadne ze synchronismu“ a nakonec se zastaví, zatímco indukční EMF indukované ve statoru zmizí a proud v něm se zvýší ostře. Proto je třeba zabránit prudkým výkyvům zatížení. K zastavení motoru musíte samozřejmě nejprve odpojit obvod statoru a poté odpojit tlumivky; při startování motoru musíte dodržet opačné pořadí operací.
Synchronní motory se nejčastěji používají k pohonu mechanismů, které pracují konstantní rychlostí. Zde jsou výhody a nevýhody synchronních motorů a způsoby jejich spouštění: Synchronní motory a jejich aplikace
Vzdělávací filmový pás - "Synchronní motory", vytvořený továrnou na vzdělávací a vizuální pomůcky v roce 1966. Můžete si jej prohlédnout zde: Filmový pás «Synchronous Motor»
