Frekvenční měniče - typy, princip činnosti, schémata zapojení
 Rotor jakéhokoli elektromotoru je poháněn silami způsobenými rotujícím elektromagnetickým polem uvnitř vinutí statoru. Jeho rychlost je obvykle určena průmyslovou frekvencí elektrické sítě.
Rotor jakéhokoli elektromotoru je poháněn silami způsobenými rotujícím elektromagnetickým polem uvnitř vinutí statoru. Jeho rychlost je obvykle určena průmyslovou frekvencí elektrické sítě.
Jeho standardní hodnota 50 hertzů znamená padesát oscilačních period za jednu sekundu. Za jednu minutu se jejich počet zvýší 60krát a je 50×60 = 3000 otáček. Rotor se pod vlivem aplikovaného elektromagnetického pole otočí stejně mnohokrát.
Pokud změníte hodnotu síťové frekvence aplikované na stator, můžete upravit rychlost otáčení rotoru a pohonu k němu připojeného. Tento princip je základem řízení elektromotorů.
Typy frekvenčních měničů
Podle návrhu jsou frekvenční měniče:
1. indukční typ;
2. elektronické.
Vyrábí asynchronní motory podle schématu s fázovým rotorem a spuštěné v režimu generátoru, jsou zástupci prvního typu. Při provozu mají nízkou účinnost a vyznačují se nízkou účinností.Proto nenašly široké uplatnění ve výrobě a používají se extrémně zřídka.
Metoda elektronické frekvenční konverze umožňuje plynulou regulaci otáček asynchronních i synchronních strojů. V tomto případě lze použít jeden ze dvou principů ovládání:
1. Podle předem stanovené charakteristiky závislosti rychlosti otáčení na frekvenci (V / f);
2. metoda vektorového řízení.
První metoda je nejjednodušší a méně dokonalá a druhá se používá k přesnému řízení otáček kritických průmyslových zařízení.
Vlastnosti vektorového řízení frekvenční konverze
Rozdíl mezi touto metodou je interakce, vliv řídicího zařízení měniče na «prostorový vektor» magnetického toku rotujícího s frekvencí rotorového pole.
Algoritmy pro převodníky pro práci na tomto principu jsou vytvořeny dvěma způsoby:
1. bezsenzorové řízení;
2. regulace průtoku.
První metoda je založena na stanovení určité závislosti na střídání sekvencí pulzně šířková modulace (PWM) invertor pro přednastavené algoritmy. V tomto případě jsou amplituda a frekvence výstupního napětí měniče řízeny skluzovým proudem a zátěží, ale bez použití zpětné vazby otáček rotoru.
Tato metoda se používá při řízení několika elektromotorů zapojených paralelně s frekvenčním měničem.Řízení toku zahrnuje monitorování provozních proudů uvnitř motoru s jejich rozkladem na aktivní a reaktivní složky a provádění úprav provozu měniče pro nastavení amplitudy, frekvence a úhlu pro vektory výstupního napětí.
To zlepšuje přesnost motoru a zvyšuje limity jeho seřízení. Použití řízení průtoku rozšiřuje možnosti pohonů pracujících v nízkých otáčkách s vysokým dynamickým zatížením, jako jsou jeřábové kladkostroje nebo průmyslové navíječky.
Použití vektorové technologie umožňuje implementovat dynamické řízení točivého momentu třífázové asynchronní motory.
Ekvivalentní obvod
Základní zjednodušený elektrický obvod indukčního motoru lze znázornit následovně.
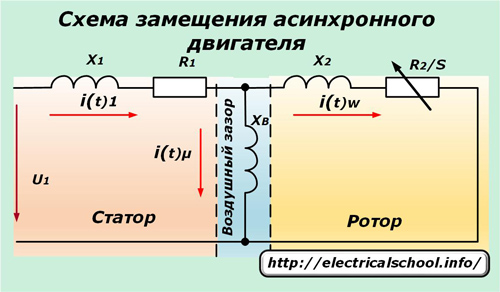
Na vinutí statoru, která mají aktivní odpor R1 a indukční odpor X1, je přivedeno napětí u1. Ten se po překonání odporu vzduchové mezery Xv přemění na vinutí rotoru a způsobí v něm proud, který překoná jeho odpor.
Ekvivalentní obvod vektorového obvodu
Jeho konstrukce pomáhá pochopit procesy probíhající v indukčním motoru.

Energie statorového proudu se dělí na dvě části:
-
iµ — tok tvořící přepážka;
-
iw — moment generující komponenta.
V tomto případě má rotor aktivní odpor R2/s závislý na skluzu.
Pro bezsenzorové řízení se měří:
-
napětí u1;
-
proud i1.
Podle svých hodnot vypočítají:
-
iµ — složka toku tvořící tok;
-
iw — točivý moment vytvářející hodnotu.
Výpočtový algoritmus nyní obsahuje elektronický ekvivalentní obvod indukčního motoru s regulátory proudu, který zohledňuje podmínky saturace elektromagnetického pole a ztráty magnetické energie v oceli.
Obě složky proudových vektorů, různé v úhlu a amplitudě, rotují společně se souřadnicovým systémem rotoru a stávají se stacionárním systémem orientace statoru.
Podle tohoto principu se parametry frekvenčního měniče upravují podle zatížení asynchronního motoru.
Princip činnosti frekvenčního měniče
Toto zařízení, kterému se také říká invertor, je založeno na dvojí změně tvaru vlny síťového napájení.
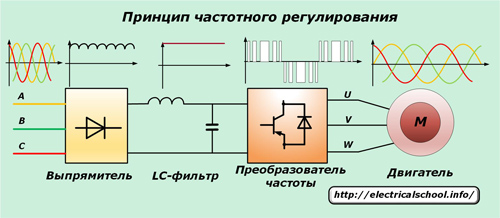
Zpočátku je průmyslové napětí přiváděno do usměrňovače s výkonnými diodami, které odstraňují sinusové harmonické, ale zanechávají vlnění signálu. Pro jejich odstranění je určena kondenzátorová banka s indukčností (LC-filtr), která zajišťuje stabilní, vyhlazený tvar usměrněnému napětí.
Signál pak jde na vstup frekvenčního měniče, což je třífázový můstkový obvod šesti výkonové tranzistory Řada IGBT nebo MOSFET s ochrannými diodami proti přepólování napětí. Dříve používané tyristory pro tyto účely nemají dostatečnou rychlost a pracují s velkými poruchami.
Pro zapnutí režimu „brzdy“ motoru lze do obvodu nainstalovat řízený tranzistor s výkonným odporem, který rozptyluje energii. Tato technika umožňuje odstranění napětí generovaného motorem, aby byly filtrační kondenzátory chráněny před přebíjením a poškozením.
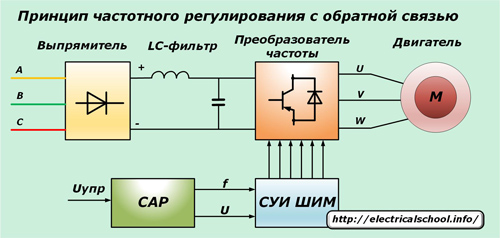
Metoda vektorového řízení frekvence převodníku umožňuje vytvářet obvody, které provádějí automatické řízení signálu ze systémů ACS. K tomu se používá systém řízení:
1. amplituda;
2. PWM (simulace šířky pulzu).
Způsob řízení amplitudy je založen na změně vstupního napětí a PWM je založen na algoritmu pro spínání výkonových tranzistorů při konstantním vstupním napětí.
Při PWM regulaci se vytvoří perioda modulace signálu, když je statorové vinutí připojeno v přesném pořadí ke kladným a záporným svorkám usměrňovače.
Vzhledem k tomu, že taktovací frekvence generátoru je poměrně vysoká, jsou ve vinutí elektromotoru, které má indukční odpor, vyhlazeny na normální sinusovku.
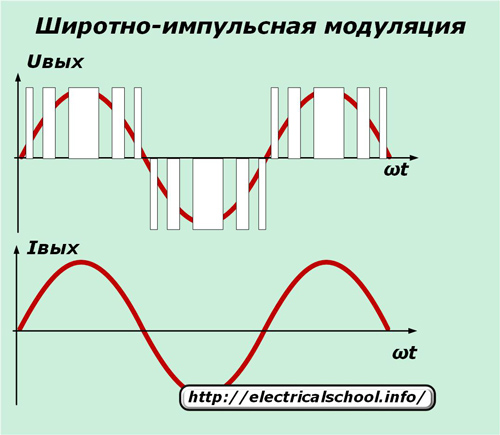
Metody PWM řízení maximalizují eliminaci energetických ztrát a poskytují vysokou účinnost konverze díky současnému řízení frekvence a amplitudy. Staly se dostupnými díky vývoji technologií řízení tyristorových tyristorů řady GTO nebo bipolárních značek IGBT tranzistorů s izolovaným hradlem.
Principy jejich zařazení pro ovládání třífázového motoru jsou uvedeny na fotografii.
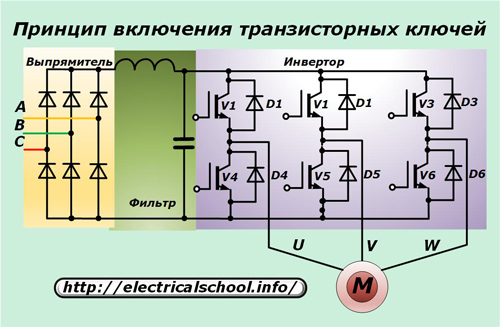
Každý ze šesti IGBT je připojen v antiparalelním obvodu k vlastní diodě zpětného proudu. V tomto případě aktivní proud indukčního motoru prochází silovým obvodem každého tranzistoru a jeho reaktivní složka je směrována přes diody.
Aby se eliminoval vliv vnějšího elektrického šumu na provoz měniče a motoru, může obvod frekvenčního měniče zahrnovat filtr pro redukci šumulikvidace:
-
rádiové rušení;
-
elektrické výboje způsobené provozovaným zařízením.
Ty jsou signalizovány řídicí jednotkou a mezi motorem a výstupními svorkami měniče je použito stíněné vedení pro snížení rázů.
Pro zlepšení přesnosti provozu asynchronních motorů obsahuje řídicí obvod frekvenčních měničů:
-
komunikační vstup s pokročilými možnostmi rozhraní;
-
vestavěný ovladač;
-
Paměťová karta;
-
software;
-
informační LED displej zobrazující hlavní výstupní parametry;
-
brzdný chopper a vestavěný EMC filtr;
-
systém chlazení okruhu založený na foukání ventilátory zvýšeného zdroje;
-
funkce ohřevu motoru stejnosměrným proudem a některé další možnosti.
Provozní schémata zapojení
Frekvenční měniče jsou určeny pro práci s jednofázovými nebo třífázovými sítěmi. Pokud však existují průmyslové zdroje stejnosměrného proudu s napětím 220 voltů, lze z nich napájet měniče.

Třífázové modely jsou určeny pro síťové napětí 380 voltů a napájí jej elektromotor. Jednofázové měniče jsou napájeny napětím 220 V a na výstupu jsou tři fáze rozložené v čase.
Schéma připojení frekvenčního měniče k motoru lze provést podle schémat:
-
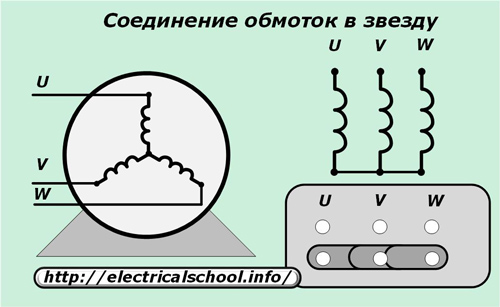
hvězdy;
-
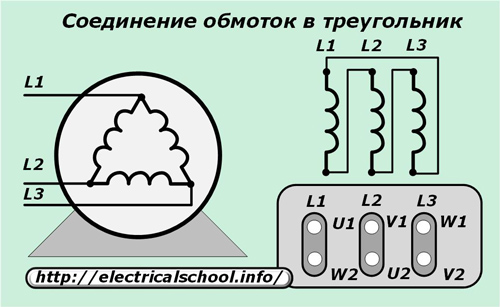
trojúhelník.
Vinutí motoru jsou sestavena do „hvězdy“ pro měnič, napájená třífázovou sítí 380 voltů.
Podle schématu "delta" jsou vinutí motoru sestavena, když je výkonový měnič připojen k jednofázové 220voltové síti.
Při volbě způsobu připojení elektromotoru k frekvenčnímu měniči je třeba dbát na poměr výkonu, který může běžící motor vytvořit ve všech režimech, včetně pomalého, zatěžovaného startu, s možnostmi měniče.
Frekvenční měnič nelze neustále přetěžovat a malá rezerva jeho výstupního výkonu zajistí jeho dlouhodobý a bezporuchový provoz.