Stanovení výkonu motoru v nepřetržitém provozu
 Režim provozu elektrického pohonu s takovou dobou trvání, ve kterém teplota elektromotoru dosáhne stacionární hodnoty, se nazývá dlouhodobý. V tomto případě se jmenovitý výkon elektromotoru musí rovnat výkonu potřebnému k provozu stroje. Pokud v katalogu není elektromotor s tímto jmenovitým výkonem, volí se motor s nejbližším vyšším výkonem.
Režim provozu elektrického pohonu s takovou dobou trvání, ve kterém teplota elektromotoru dosáhne stacionární hodnoty, se nazývá dlouhodobý. V tomto případě se jmenovitý výkon elektromotoru musí rovnat výkonu potřebnému k provozu stroje. Pokud v katalogu není elektromotor s tímto jmenovitým výkonem, volí se motor s nejbližším vyšším výkonem.
Pokud je pro daný technologický proces známa řezná síla F v N a řezná rychlost v vm/min, lze řezný výkon v kW určit podle vzorce:

Pro stanovení odpovídajícího hřídelového výkonu hnacího elektromotoru je nutné vzít v úvahu ztráty v mechanických převodech stroje a k tomu je nutné znát účinnost stroje ηc; pak:

Výkonové ztráty při spouštění motoru (v průměru) převyšují ztráty při jmenovitém zatížení, ale v uvažovaném režimu se spouštěcí procesy opakují tak zřídka, že lze tyto ztráty zanedbat.
Při určování hnací síly univerzálních (univerzálních) strojů se uvažují o strojích s kontinuálním režimem provozu, jelikož při. provoz těchto strojů je možný i v takovém režimu. V tomto případě výkon hřídele elektromotoru

kde Prn — nejvyšší možný (nominální) řezný výkon;
ηcn — účinnost hlavního pohybového obvodu stroje při jmenovitém zatížení (hodnota obvykle blízká 0,8).
Účinnost stroje ηsn při jeho plném zatížení lze definovat jako součin účinnosti jednotlivých ozubených kol, které tvoří kinematický řetězec při provozu při dané rychlosti:

Každá rychlost odpovídá určité hodnotě účinnosti stroje v závislosti na počtu převodových stupňů a jejich typu.
S výrazným zvýšením rychlosti otáčení se výrazně zvyšuje ztráta výkonu ve stroji. Je to dáno tím, že některé ztráty rostou rychleji než rychlost otáčení (například ztráty při míchání oleje v převodovkách).
 Výkon potřebný k pohonu silových obvodů je obvykle nízký. Při společném pohonu hlavního pohonu a napájecího obvodu by měl být výkon motoru přibližně o 5 % vyšší než výkon požadovaný pro hlavní obvod pohonu. U samostatného napájecího zdroje musí být jeho výkon stanoven stejným způsobem, jako to bylo provedeno pro hlavní obvod pohonu. V tomto případě se výkon motoru vynakládá na podávání a překonávání tření ve vedeních a dalších přenosových spojkách.
Výkon potřebný k pohonu silových obvodů je obvykle nízký. Při společném pohonu hlavního pohonu a napájecího obvodu by měl být výkon motoru přibližně o 5 % vyšší než výkon požadovaný pro hlavní obvod pohonu. U samostatného napájecího zdroje musí být jeho výkon stanoven stejným způsobem, jako to bylo provedeno pro hlavní obvod pohonu. V tomto případě se výkon motoru vynakládá na podávání a překonávání tření ve vedeních a dalších přenosových spojkách.
Efektivitu dodavatelského řetězce lze určit na základě znalosti prvků, které tento řetězec tvoří.Typicky je hodnota této účinnosti v rozmezí 0,1-0,2.
Univerzální stroje s motory vybranými na základě podmínek nejvyššího zatížení jsou obvykle pod zatížením. Při takové práci se to výrazně zhoršuje řídit energetický výkon... Snížení jmenovitého výkonu elektromotoru oproti co největší zátěži vede k omezení možností využití stroje. Vzhledem k tomu, že je to nepřijatelné, vyrábějí obráběcí závody univerzální stroje s nainstalovanými elektromotory s primárním pohonem, které jsou vybrány pro nejvyšší výkon, který mohou tyto stroje provozovat.
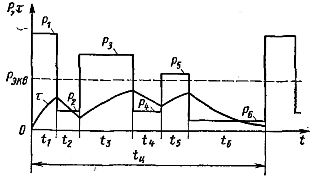
Rýže. 1. Harmonogram nepřetržitého provozu s proměnnou zátěží
Při dlouhodobém proměnlivém zatížení se provoz elektrického pohonu vyznačuje rozvrhem zatížení podobným tomu, který je znázorněn na Obr. 1.Každý obráběcí přechod součásti obráběcího stroje odpovídá určitému výkonu hřídele motoru. Období řezání jsou oddělena intervaly nečinnosti stroje, během kterých je nástroj přiváděn a odebírán a obrobek je vyměňován.
Celková doba zpracování jednoho dílu včetně všech pomocných operací se nazývá doba cyklu tts. Stejně tak stroje, které zpracovávají stejný typ dílů a mají třecí spojku v hlavním hnacím řetězu, stejně jako stroje s automatickou linkou, kde se mnoho elektromotorů točí nepřetržitě.
Při provozu s proměnnou zátěží musí být motor zvolen tak, aby mohl pracovat na nejvyšší výkon podle plánu (volba přetížení), aby se při provozu s daným plánem zátěže motor nepřehříval nad normální hodnotu (výběr pomocí topení). Ze dvou jmenovitých kapacit určených těmito podmínkami se vybere ta větší.
Přetížitelnost

kde Pn1 je jmenovitý výkon motoru požadovaný za podmínek přetížení; Pmax — maximální výkon programu zatížení odpovídající provozu motoru v rovnovážném stavu; λ1 — koeficient dovoleného přetížení.