Tyristorové regulátory napětí
 Tyristorové regulátory napětí jsou zařízení určená k řízení otáček a točivého momentu elektromotorů. Regulace otáček a točivého momentu se provádí změnou napětí přiváděného na stator motoru a provádí se změnou úhlu otevření tyristorů. Tento způsob řízení motoru se nazývá fázové řízení. Tato metoda je typem parametrického (amplitudového) řízení.
Tyristorové regulátory napětí jsou zařízení určená k řízení otáček a točivého momentu elektromotorů. Regulace otáček a točivého momentu se provádí změnou napětí přiváděného na stator motoru a provádí se změnou úhlu otevření tyristorů. Tento způsob řízení motoru se nazývá fázové řízení. Tato metoda je typem parametrického (amplitudového) řízení.
Tyristorové regulátory napětí lze implementovat s uzavřenými i otevřenými řídicími systémy. Regulátory s otevřenou smyčkou neposkytují uspokojivý výkon řízení rychlosti. Jejich hlavním účelem je upravit točivý moment pro získání požadovaného provozního režimu pohonu v dynamických procesech.
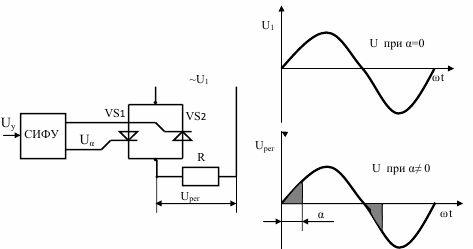
Zjednodušené schéma tyristorového regulátoru napětí
Výkonová část jednofázového tyristorového regulátoru napětí obsahuje dva řízené tyristory, které zajišťují tok elektrického proudu na zátěži ve dvou směrech při sinusovém vstupním napětí.
Tyristorové regulátory s uzavřenou smyčkou se používají zpravidla s negativní zpětnou vazbou otáček, což umožňuje dostatečně tuhé mechanické vlastnosti pohonu v oblasti nízkých otáček.
Nejúčinnější použití tyristorových regulátorů pro regulaci otáček a točivého momentu asynchronní rotorové motory.
Napájecí obvody tyristorových regulátorů
Na Obr. 1, a-e znázorňují možná schémata pro zahrnutí usměrňovacích prvků regulátoru do jedné fáze. Nejběžnější z nich je schéma na obr. 1, a. Lze jej použít pro libovolné schéma zapojení statorových vinutí. Přípustný proud procházející zátěží (efektivní hodnota) v tomto obvodu v režimu trvalého proudu je:

kde Azt je přípustná průměrná hodnota proudu procházejícího tyristorem.
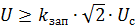
Maximální dopředné a zpětné napětí tyristoru

kde kzap — bezpečnostní faktor zvolený s ohledem na možná spínací přepětí v obvodu; — efektivní hodnota síťového napětí sítě.
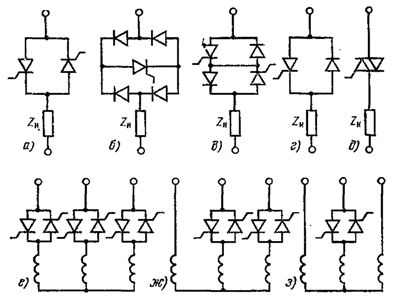
Rýže. 1. Schémata výkonových obvodů tyristorových regulátorů napětí.
Ve schématu na Obr. 1b je v úhlopříčce můstku neřízených diod zařazen pouze jeden tyristor. Poměr mezi zátěžovým a tyristorovým proudem pro tento obvod je:

Neřízené diody se volí pro proud, který je poloviční než u tyristoru. Maximální propustné napětí k tyristoru
Zpětné napětí tyristoru se blíží nule.
Schéma na Obr. 1b má určité odlišnosti od schématu na Obr. 1, ale pro konstrukci systému řízení. Ve schématu na Obr. 1 a řídicí impulsy pro každý z tyristorů musí sledovat frekvenci napájecího zdroje. Ve schématu na Obr.1b je frekvence řídicích impulsů dvakrát vyšší.
Schéma na Obr. 1, c, sestávající ze dvou tyristorů a dvou diod, pokud je to možné, ovládání, zatížení, proud a maximální propustné napětí tyristorů je podobné schématu na Obr. 1, a.
Zpětné napětí v tomto obvodu v důsledku bočníku diody je blízké nule.
Schéma na Obr. 1d, pokud jde o proud a maximální propustné a zpětné napětí tyristorů, je podobný obvodu na obr. 1d. 1, a. Schéma na Obr. 1, d se liší od uvažovaných požadavků na řídicí systém, aby poskytoval potřebný rozsah variace regulačního úhlu tyristoru.Pokud se úhel počítá od nulového fázového napětí, pak pro obvody na obr. 1, a-c, vztah
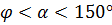
kde φ- fázový úhel zátěže.
Pro obvod z Obr. 1, d, podobný poměr má tvar:
Potřeba zvětšit rozsah změny úhlu komplikuje tyristorový řídicí systém… Diagram na Obr. 1, d lze použít, když jsou statorová vinutí zapojena do hvězdy bez nulového vodiče a do trojúhelníku s usměrňovači obsaženými v linkových vodičích. Rozsah tohoto schématu je omezen na nevratné i reverzibilní elektrické pohony s reverzním kontaktem.
Schéma na Obr. 4-1, e je svými vlastnostmi podobný schématu na obr. 1, a. Proud triaku se zde rovná proudu zátěže a frekvence řídicích impulsů se rovná dvojnásobku frekvence napájecího napětí. Nevýhodou triakového obvodu je mnohem menší než u konvenčních tyristorů, přípustné hodnoty du / dt a di / dt.
Pro tyristorové regulátory je nejracionálnější schéma na obr. 1, ale se dvěma antiparalelně zapojenými tyristory.
Výkonové obvody regulátorů jsou realizovány antiparalelními tyristory ve všech třech fázích (symetrický třífázový obvod), ve dvou a jedné fázi motoru, jak je znázorněno na Obr. 1, f, g, resp.
U regulátorů používaných v elektrických pohonech jeřábů je nejrozšířenější symetrický spínací obvod znázorněný na obr. 1, e, který se vyznačuje nejnižšími ztrátami z vyšších harmonických proudů. Větší ztráty v obvodech se čtyřmi a dvěma tyristory jsou dány napěťovou nerovnováhou ve fázích motoru.
Základní technické údaje pro tyristorové regulátory řady PCT
Tyristorové regulátory řady PCT jsou zařízení pro změnu (podle daného zákona) napětí přiváděného na stator indukčního motoru s vinutým rotorem. Tyristorové regulátory řady PCT jsou vyrobeny podle symetrického třífázového spínacího obvodu (obr. 1, e). Použití regulátorů uvedené řady v elektrických pohonech jeřábů umožňuje regulaci frekvence otáčení v rozsahu 10:1 a regulaci točivého momentu motoru v dynamických režimech při rozjezdu a zastavení.
Tyristorové regulátory řady PCT jsou určeny pro trvalé proudy 100, 160 a 320 A (maximální proudy 200, 320 a 640 A) a napětí 220 a 380 V AC. Regulátor se skládá ze tří napájecích jednotek sestavených na společném rámu (podle počtu fází antiparalelně zapojených tyristorů), jednotky proudového snímače a automatizační jednotky. Zdroje využívají tabletové tyristory s chladiči z extrudovaného hliníkového profilu. Chlazení vzduchem – přirozeně. Blok automatizace je stejný pro všechny verze regulátorů.
Tyristorové regulátory jsou vyráběny v krytí IP00 a jsou určeny pro montáž na standardní rámy magnetických ovladačů typu TTZ, které jsou designově podobné ovladačům řady TA a TCA. Celkové rozměry a hmotnost regulátorů řady PCT jsou uvedeny v tabulce. 1.
Tabulka 1 Celkové rozměry a hmotnost regulátorů napětí řady PCT

Magnetické regulátory TTZ jsou vybaveny směrovými stykači pro reverzaci motoru, stykači obvodu rotoru a dalšími relé-kontaktními prvky elektropohonu, které komunikují regulátor s tyristorovým regulátorem. Konstrukční struktura řídicího systému regulátoru je patrná z funkčního schématu elektrického pohonu na Obr. 2.
Třífázový symetrický tyristorový blok T je řízen systémem řízení fáze SFU. Pomocí ovladače KK v regulátoru se mění nastavení otáček BZS Prostřednictvím bloku BZS se ve funkci času ovládá urychlovač KU2 v okruhu rotoru. Rozdíl mezi referenčními signály a tachogenerátorem TG je zesilován zesilovači U1 a UZ Na výstup zesilovače UZ je připojeno zařízení logického relé, které má dva stabilní stavy: jeden odpovídá sepnutí stykače v dopředném směru. KB, druhý - k sepnutí dopředného stykače směrem vzad KN.
Současně se změnou stavu logického zařízení dochází k obrácení signálu v řídicím obvodu rozváděče. Signál z přizpůsobovacího zesilovače U2 je sčítán se signálem zpětné vazby zpožděného proudu statoru motoru, který přichází z bloku TO omezujícího proud a je přiváděn na vstup SFU.
Logický blok BL je také ovlivněn signálem z proudového snímače DT a modulu přítomnosti proudu NT, který zakazuje spínání směrových stykačů pod napětím. Jednotka BL také provádí nelineární korekci systému stabilizace rychlosti pro zajištění stability pohonu. Regulátory lze použít v elektrických pohonech zdvihacích a pojezdových mechanismů.
Regulátory řady PCT jsou vyrobeny se systémem omezení proudu. Úroveň proudového omezení pro ochranu tyristorů před přetížením a pro omezení momentu motoru v dynamických režimech se plynule mění od 0,65 do 1,5 jmenovitého proudu regulátoru, úroveň proudového omezení pro ochranu proti nadproudu — od 0,9 do. 2,0 jmenovitý proud regulátoru. Široká škála nastavení ochrany umožňuje provoz regulátoru stejné standardní velikosti s motory, které se liší ve výkonu asi 2krát.
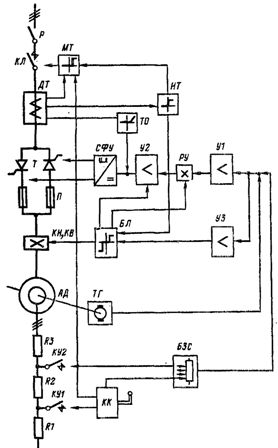
Rýže. 2. Funkční schéma elektrického pohonu s tyristorovým regulátorem typu PCT: KK — povelový regulátor; TG — tachogenerátor; KN, KB — směrové stykače; BZS — blok nastavení rychlosti; BL — logický blok; U1, U2. US - zesilovače; SFU – systém řízení fáze; DT — snímač proudu; IT – aktuální jednotka přítomnosti; TO — jednotka omezení proudu; MT – ochranná jednotka; KU1, KU2 — stykače zrychlení; KL — lineární stykač: R — jistič.
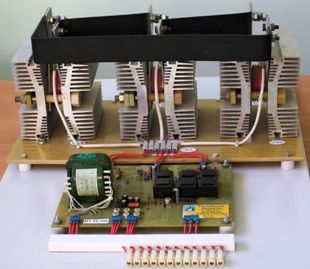
Rýže. 3. Tyristorový regulátor napětí PCT
Citlivost systému přítomnosti proudu je 5-10 A rms proudu ve fázi. Regulátor také poskytuje ochranu: nulovou, před spínacími přepětími, před ztrátou proudu alespoň v jedné z fází (bloky IT a MT), před rušením rádiového příjmu.Vysokorychlostní pojistky typu PNB 5M poskytují ochranu proti zkratovým proudům.