Schémata ovládání elektrického pohonu z více míst
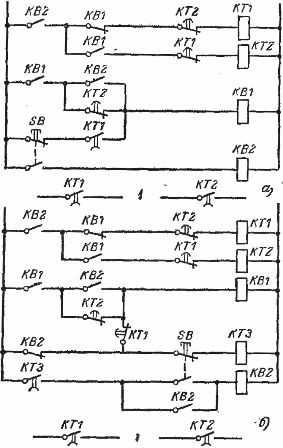
 U kontinuálních procesních linek, kde pohony pracují převážně v jednom směru (vpřed) a reverzace jsou vzácné, se doporučuje použít obvod (obr. 1) se zařazením linkového stykače pro provoz „vpřed“ přes jistič, a pro "reverzní" provoz — přes ovládací kontakty stykače KMR. Toto uspořádání zkracuje čas pro spuštění pohonu v preferovaném směru.
U kontinuálních procesních linek, kde pohony pracují převážně v jednom směru (vpřed) a reverzace jsou vzácné, se doporučuje použít obvod (obr. 1) se zařazením linkového stykače pro provoz „vpřed“ přes jistič, a pro "reverzní" provoz — přes ovládací kontakty stykače KMR. Toto uspořádání zkracuje čas pro spuštění pohonu v preferovaném směru.
Schéma na Obr. 2 umožňuje dálkové reverzibilní ovládání elektromotoru z pohybujícího se předmětu. Tento okruh se používá např. pro ovládání motorů poklopů vytápěcích studní z jeřábu. Signální obvody a příjem různých signálů jsou znázorněny na Obr. 3 — 9.
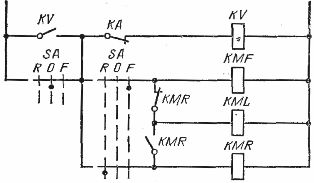
Rýže. 1. Schéma ovládání zadního motoru se vzácnou zadní «zadní».
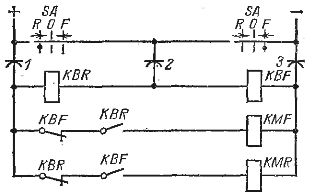
Rýže. 2. Schéma reverzibilního ovládání motoru pomocí ovládacího trolla.
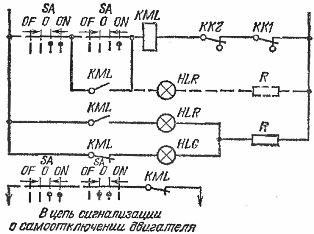
Rýže. 3. Schéma signalizace stavu nevratného elektrického pohonu.
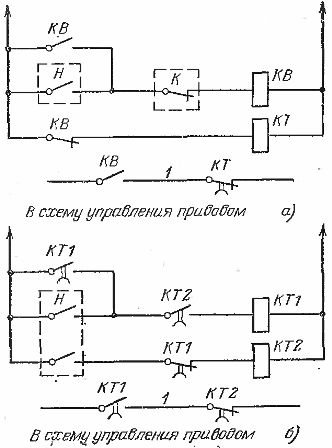
Rýže. 4.Obvody pro příjem signálu s časovým zpožděním po začátku vystavení dlouhému (a) a pulznímu (b) signálu: K — odblokovací kontakt, 1 — kontakty na ovládací obvod pohonu.
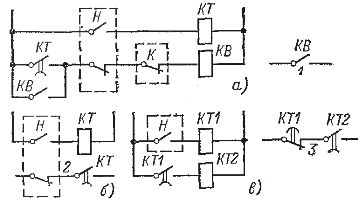
Rýže. 5. Schémata pro příjem signálu po skončení doby (z ocasu) signálu H dlouhý (a), pulz (b), pulz s časovým zpožděním (c). K — odblokovací kontakt, 1, 2, 3 — kontakty k řídicímu obvodu pohonu.
Rýže. 6. Schéma pro příjem dlouhého signálu po začátku sekundárního H.
Rýže. 7. Schéma pro příjem pulzního signálu s časovým zpožděním po sekundárním působení signálu H (KT1 je 0,2-0,8 s; KT2 0,3 s; KTZ 0,5 s). 1 — kontakty k řídicímu obvodu měniče.
Rýže. 8. Schéma příjmu signálu s určitou dobou trvání, bez ohledu na dobu trvání stisku tlačítka: 1 — kontakt na řídicí obvod pohonu.
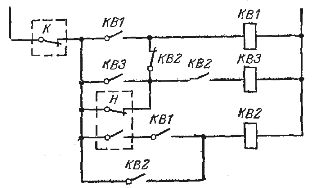
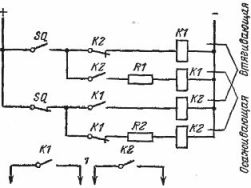
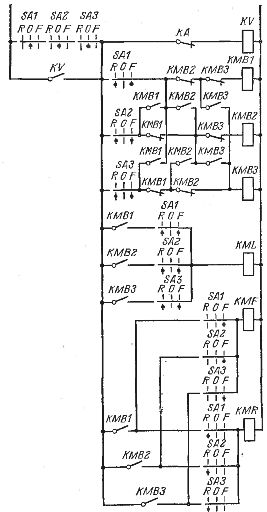
Schémata počítání se používají k automatickému ovlivnění pohonu po napočítání určitého počtu operací nebo cyklů. Mohou počítat uzávěry a otvory (obr. 10), pouze uzávěry (obr. 11), nebo pouze otvory (obr. 12).
Počítací impulsy podle uvedených schémat jsou dodávány z kontaktů fotorelé, pohybových spínačů nebo jiných zařízení.
Ve schématu počítání znázorněném na Obr. 10 je použito relé REV850 s magnetickým "přilepením" kotvy, a proto přerušení napájení tohoto obvodu neruší počítání. V jiných počítacích obvodech dochází při přerušení dodávky napětí ke ztrátě počtu impulzů.
Chcete-li zkontrolovat platnost schématu účtu (obr. 11), ovládací tlačítka… Při každém stisknutí tlačítka SB0N obvod provede jedno počítání. Tlačítko SB0F slouží k vynulování počítadla.Taková tlačítka mohou být také poskytnuta v jiných schématech.
Rýže. 9. Obvody pro příjem signálů ve dvou různých okruzích postupným stisknutím jednoho tlačítka: a — doba trvání signálu se rovná době trvání stisku tlačítka, b — doba trvání signálu nezávisí na době trvání stisku tlačítka. , 1 — kontakty k řídicímu obvodu měniče.
Rýže. 10. Schéma účtu do dvou.
Impulzy pro každé číslo jsou jedno sepnutí a jedno rozepnutí kontaktu koncového spínače SQ; 1 — kontakty k řídicímu obvodu měniče.
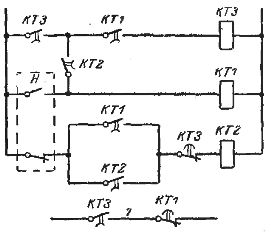
Počítání impulsů v obvodech na Obr. 11, 12 jsou krátkodobé sepnutí (rozepnutí) kontaktu SQ a sepnutý stav tohoto kontaktu by měl stačit k sepnutí impulsního stykače KNA a jednoho relé KB (KL).
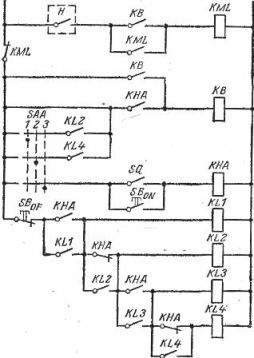
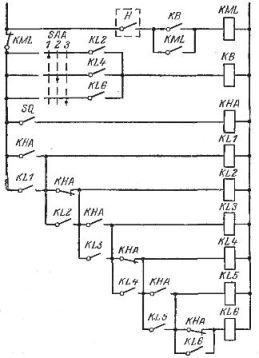
Rýže. 11. Schéma počítání do tří při sepnutém kontaktu SQ.
Rýže. 12. Schéma pro počítání do tří při rozepnutí kontaktu SQ
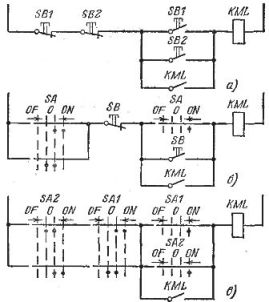
Rýže. 13. Schémata nevratného ovládání motoru ze dvou míst: a — dvěma tlačítky, b — tlačítkem a klíčem, c — dvěma klíči.
Rýže. 14. Schéma jednostranně závislého reverzního řízení elektropohonu ze dvou míst.
Počet je vynulován síťovým stykačem KML; doba sepnutí stykače SQ musí být kratší než doba sepnutí stykače KML.
Schémata počítání pro o něco větší číslo lze sestavit analogicky s výše uvedenými schématy, ale když je počet větší než pět nebo osm, nebo v případech, kdy je ztráta počítání po vymizení napětí nepřijatelná, doporučuje se použít číslované relé.
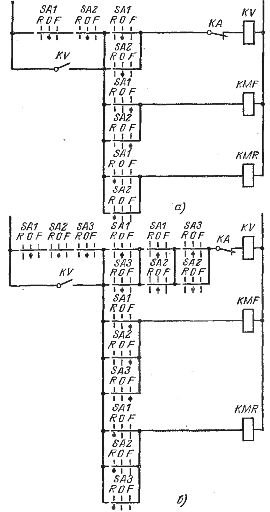
Rýže. 15. Schémata závislého reverzního řízení motoru: a — ze dvou míst, b — ze tří míst
Lze použít relé počtu kroků motoru typu E-526 pro až 30 impulzů nebo relé počtu impulzů typu E 531 s počtem impulzů až 75. Relé pracují na střídavý proud a jejich kontakty umožňují vypnutí při 220 V resp. a DC 50 a 30 wattů.
Řídicí obvody elektromotorů z více míst mohou být závislé, jednosměrně závislé a nezávislé (obr. 13). Nejčastěji se jako nejjednodušší používají závislá schémata řízení (obr. 15). Podle těchto schémat při ovládání jakéhokoli ovládacího zařízení způsobí pohyb rukojeti jiného zařízení z nuly do provozní polohy zastavení motoru.
Podle schémat jednosměrně závislého ovládání ze dvou (obr. 14) a tří (obr. 16) míst lze spínač SA1 ovládat nezávisle na poloze spínače SA2 (SA2 a SA3). Ovládání přepínače SA2 je možné, když je přepínač SA1 v nulové poloze a nezávisí na poloze přepínače SA3. Ovládání spínačů SA3 je možné, když jsou spínače SA1 a SA2 v nulové poloze.
Obrázek 16. Schéma jednosměrného závislého řízení třímístného pístového motoru
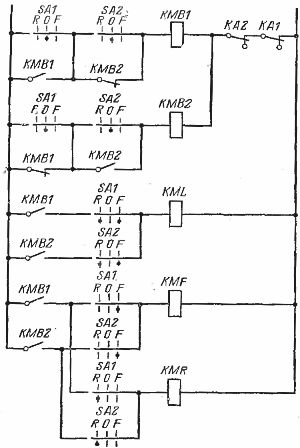
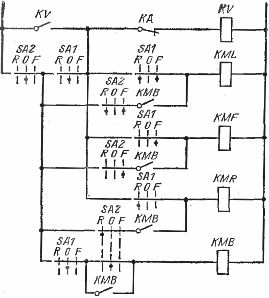
Rýže. 17. Schéma nezávislého reverzního řízení motoru ze dvou míst.
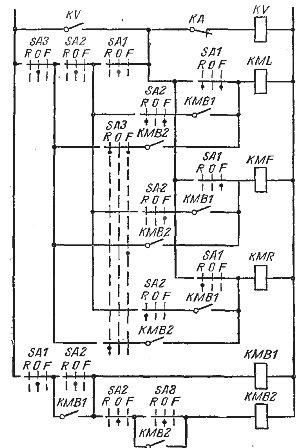
Rýže. 18. Schéma nezávislého reverzního řízení motoru ze tří míst.
V nezávislých schématech ovládání (obr. 17 a 18), kdy je pohon ovládán kterýmkoli prvním spínačem (SA1, SA2 nebo SA3), pohyb rukojeti druhého spínače neovlivňuje činnost měniče. Po návratu do nulové polohy rukojeti prvního klíče se akční člen zastaví bez ohledu na polohu rukojeti druhého klíče (nebo dvou dalších). Nový start je možný pouze po vrácení druhého klíče (nebo dvou dalších) do nulové polohy.
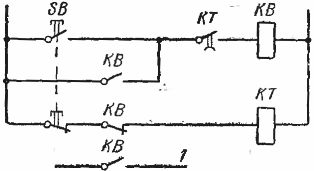
Velmi často využívají řízení pohonu ze dvou a tří míst podle zjednodušeného schématu (obr. 19); to znamená přednostní ovládání pouze z jednoho prvního místa (klíč SA1). Když je pohon ovládán jiným spínačem (SA2 nebo SA3), pohyb rukojeti prvního spínače z nulové polohy způsobí přenesení ovládání na tento spínač.
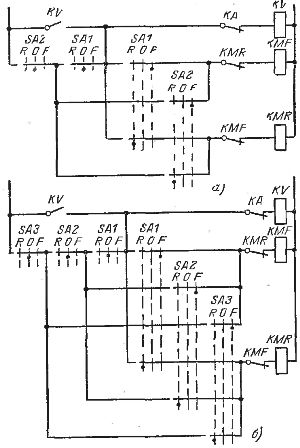
Rýže. 19. Zjednodušená schémata ovládání vratného elektrického pohonu: a — ze dvou míst, b — ze tří míst.