Ovládací a silové obvody pro zdvihací elektromagnety
 Zvedací elektromagnety mají vysokou indukčnost, proto se pro rychlé a úplné vybití zátěže, stejně jako pro omezení přepětí na hodnotu ne větší než 2 kV, používají speciální obvody a ovládací zařízení. Elektromagnety přijímají napětí z motorgenerátoru nebo usměrňovače. Schématická schémata ovládání při napájení elektromagnetů ze sítě stejnosměrného proudu jsou znázorněna na obr. 1, a a b.
Zvedací elektromagnety mají vysokou indukčnost, proto se pro rychlé a úplné vybití zátěže, stejně jako pro omezení přepětí na hodnotu ne větší než 2 kV, používají speciální obvody a ovládací zařízení. Elektromagnety přijímají napětí z motorgenerátoru nebo usměrňovače. Schématická schémata ovládání při napájení elektromagnetů ze sítě stejnosměrného proudu jsou znázorněna na obr. 1, a a b.
Řízení zvedací elektromagnet podle uvedeného schématu se provádí následujícím způsobem. Při zapnutí regulátoru K je přivedeno napětí na magnetizační stykač B, jehož zapínací kontakty spojují elektromagnet se sítí. V tomto případě protéká jmenovitý proud cívkou M elektromagnetu a paralelně zapojený vybíjecí odpor (P1 — P4, P4 — PZ a PZ — P2) obtéká proudem nižší hodnoty. Cívka stykače H zapojená mezi body 6 a 7 nevede kvůli přítomnosti sériově zapojeného otevřeného pomocného kontaktu B, rozepnutého, když je stykač B zapnutý.
Když ovladač K.se vypne, otevřou se zapínací kontakty stykače B, elektromagnet se nakrátko odpojí a automaticky přepne na obrácenou polaritu a po poklesu zátěže je elektromagnet definitivně odpojen od zdroje energie. Toto zahrnutí elektromagnetu zajišťuje demagnetizaci zátěže, což přispívá k jejímu rychlému pádu.
Automatickou akci při vypnutí elektromagnetu zajišťuje především činnost demagnetizačního stykače H. Napětí na svorkách cívky stykače H je určeno úbytkem napětí v odporových sekcích 6 — P4 a P4—7 . Po vypnutí elektromagnetu jeho proud hned nezmizí, ale je uzavřen obvodem vybíjecích odporů. Odpory sekcí 6 — P4 a P4—7 se volí tak, že po vypnutí regulátoru K a sepnutí rozpínacího kontaktu B dojde k sepnutí stykače H.
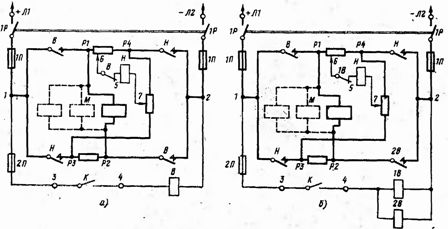
Rýže. 1. Schémata ovládání magnetických ovladačů PMS 50 (a) a PMS 150 (b) pro zdvihací elektromagnety: V nebo 1V, 2V-bipolární magnetizační stykač nebo dva unipolární; H — dvoupólový demagnetizační stykač; 1P — spínač; 1P, 2P — pojistky silového obvodu a řídicího obvodu; K – řídící jednotka; M — elektromagnet; Vybíjecí odpory P1-P4, P4-P3 a P3-P2.
Po sepnutí stykače H se sepnou jeho výkonové kontakty a elektromagnet se připojí k síti. V tomto případě se směr proudu v cívce elektromagnetu a v odporu 6-P4 zapojeném do série s cívkou časem mění na opačný. Ke změně směru proudu v úseku odporu 6 — P4 dochází při předběžném snížení předchozího opačně nasměrovaného proudu na nulu.Při nulovém proudu v sekci 6 — P4 zůstává stykač H zapnutý, protože k tomu stačí úbytek napětí v sekci P4–7 (v sekci 6 — P4 je úbytek napětí nulový).
Při změně směru proudu v sekci 6 — P4 se stykač H vypne, protože se ukáže, že jeho cívka je spojena s rozdílem úbytku napětí v sekcích 6 — P4 a P4 — 7. K přerušení stykače H dochází, když demagnetizační proud dosáhne hodnoty rovné 10-20% pracovního proudu studené cívky elektromagnetu, tedy prakticky po demagnetizaci a ztrátě zátěže.
Po vypnutí stykač H odpojí cívku elektromagnetu od sítě, která zůstane sepnutá vůči vybíjecímu odporu. To usnadňuje přerušení oblouku ze stykače a snižuje přepětí a zvyšuje životnost izolace cívky. Rozpínací pomocný kontakt stykače B (v obvodu cívky stykače H) zabraňuje současnému provozu obou stykačů.
Obvod umožňuje upravit dobu demagnetizace, což lze provést pohybem svorek odporu, to znamená změnou hodnot odporu sekcí 6 — P4 a P4—7. Zároveň se tato doba automaticky nastavuje v závislosti na typu zvedáného nákladu. S větší hmotností zátěže je její magnetická vodivost větší, což vede ke zvýšení časové konstanty elektromagnetu a tím ke zvýšení doby demagnetizace. S nízkou hmotností zátěže se zkracuje doba demagnetizace.
Podle popsaného schématu jsou vyráběny magnetické regulátory typů PMS 50, PMS 150, PMS50T a PMS 150T.
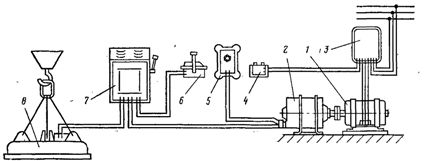
Rýže. 2.Elektrický obvod zvedacího elektromagnetu jeřábu v přítomnosti sítě střídavého proudu: 1 — asynchronní elektromotor; 2 — dostatečný generátor proudu; 3 — magnetický startér; 4 — ovládací tlačítko; 5 — regulátor buzení; 6 — povelový ovladač; 7 — magnetický ovladač; 8 — zvedací elektromagnet.
Většina jeřábů se zvedacími solenoidy je napájena ze sítě, takže pro stejnosměrné solenoidy je nutné použít motorgenerátor nebo usměrňovač. Na Obr. 2 znázorňuje napájecí obvod zvedacího elektromagnetu z motorgenerátoru. Ochrana generátoru proti zkratovým proudům. v kabelu napájejícím elektromagnet je vyvedeno napěťové relé typu REV 84.
Výměna rotačních měničů za statické měniče snižuje investiční náklady, elektrickou hmotnost a provozní náklady. Magnetický ovladač typu PSM 80 v kombinaci s ovladačem selsyn KP 1818 umožňuje nastavení nosnosti. To má velký význam při pracích spojených s dokončováním, tříděním, značením a přepravou plechu v hutních provozech, ale i v různých skladech a základnách.
Na Obr. 3 znázorňuje schéma magnetického regulátoru PSM 80 se staticky řízeným měničem. Převodník je vyroben podle beztransformátorového třífázového plnovlnného obvodu s jedním tyristorem a výbojovou diodou. Regulace proudu se provádí změnou výstupního napětí měniče změnou úhlu otevření tyristoru. Úhel otevření tyristoru závisí na referenčním signálu, který je plynule nastavitelný v širokém rozsahu synchronním řídicím regulátorem.
Napájení I používá třívinutý transformátor.Vinutí 36 V slouží k napájení reléových prvků, z vinutí 115 V je odstraněno selsinové budicí napětí regulátoru. Součástí zdroje je jednofázový usměrňovač D7-D10, na jehož výstupu jsou zenerovy diody St1-St3 a předřadný odpor R2.
Stabilizované napájecí napětí reléového prvku 16,4 V je odstraněno zenerovými diodami St2 a St3. V tomto případě protéká odporem R3 a bází tranzistoru T1 propustný proud, který tranzistor sepne. Zenerova dioda St1 je aplikována na bázi tranzistoru T2 záporným předpětím (-5,6 V), aby se vypnula, když je tranzistor T1 otevřený.
Bloková úloha II se skládá z Selsinasoučástí regulátoru selsyny a jednofázového usměrňovače D11-D14. Síťové napětí rotoru selsyn je přivedeno na vstup můstku, které se mění, když se otáčí vzhledem ke statoru. Rotor se otáčí klikou CCK Na výstupu můstku se získává měnící se usměrněné napětí, úměrně tomu se mění i výstupní proud, který protéká při otevřeném tranzistoru T1 jeho bází a rezistorem R6. Reléový prvek je sestaven na dvou tranzistorech typu p-p-p.
Pro zajištění režimu fázového řízení v obvodu je k dispozici pilový zdroj napětí, což je RC obvod, který je bočníkem tyristoru T. Při sepnutém tyristoru se nabíjejí kondenzátory C4 C5. Při otevření tyristoru T dojde k rychlému vybití kondenzátorů. Proud pily protéká rezistorem R13 a bází tranzistoru T1.
Ovladač selsinki má jednu pevnou polohu (nulu) a zajišťuje stav brzdění v jakékoli mezipoloze ovládací rukojeti.V tomto případě každé poloze rotorového selsynu odpovídá určitá hodnota elektromagnetického proudu. V řídicích polohách obvod udržuje s dostatečnou přesností průměrnou hodnotu proudu elektromagnetu při zahřívání jeho cívky. Tolerance proudu pro studenou a horkou cívku nepřesahují 10% a maximální hodnota proudu pro vyhřívanou cívku nepřesahuje katalogovou hodnotu proudu o více než 5. Při kolísání napájecího napětí v rozsahu (0,85 — 1,05) UH, změna proudu elektromagnetu nepřekračuje stanovené limity.
Spínací obvod DC strany obsahuje:
• dvoupólové stykače pro přímé spínání elektromagnetů KB a zpětného CV;
• dvě časová relé РВ a РП pro řízení procesu demagnetizace elektromagnetu během vypínání,
• vybíjecí odpory R19 – R22 pro omezení přepětí, ke kterému dochází při vypnutí elektromagnetu;
• dioda D4 pro snížení výkonu vybíjecích odporů.
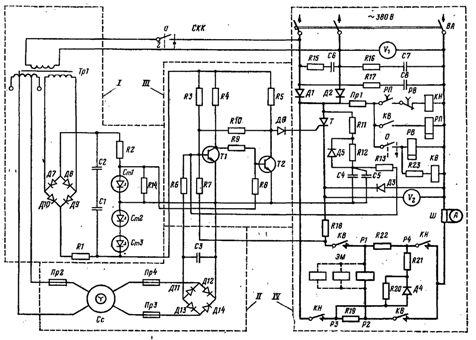
Rýže. 3. Schéma pro nastavení zatížitelnosti elektromagnetu: I - napájecí blok: II - úkolový blok; III — reléový prvek; VI — silový obvod; R1 — R25 — odpory; C1 — C8 — kondenzátory, W — bočník; VA — automatický spínač; D1 -D16 — diody; KV a KN — stykače s přímým a zpětným vinutím elektromagnetu (magnetizace a demagnetizace); РВ a РП — časové relé pro řízení procesu demagnetizace, Pr1 — Pr4 — pojistky; Сс — ovladač selsyn; St1 -St3 — zenerovy diody; T — tyristor: T1, T2 — tranzistory, TP1 — transformátor; EM — zvedací elektromagnet; SKK — řídicí jednotka selsyn.
Pokud se přeruší kabel napájející elektromagnet, je nutné vypnout vypínač nebo jistič magnetického ovladače. Je přísně zakázáno být pod kohoutkem s funkčním elektromagnetem. Kontrola a výměna zařízení musí být prováděna při vypnutém hlavním vypínači vodovodní baterie.
Všechna elektrická zařízení musí být bezpečně uzemněna. Zvláštní pozornost věnujte uzemnění elektromagnetu. Zemnicí šroub v elektromagnetu je připojen k zemnicímu šroubu skříně magnetického ovladače. Připojení je provedeno z jedné z žil třížilového napájecího kabelu. Jinak by se provoz elektrického zařízení měl řídit obecnými bezpečnostními pravidly pro údržbu elektrických instalací.