Hnací řetězy dopravníků
 Článek zkoumá schémata elektrického pohonu některých dopravníků. Na Obr. 1 schematicky znázorňuje elektrický pohon jednotlivých dopravníkových linek, jejichž rychlosti musí být striktně stejné. Taková potřeba vyvstává při kontinuální výrobě, kdy se různé výrobky po nezbytných technologických operacích na samostatných linkách musí na místě montáže setkat v přísném vzájemném souladu.
Článek zkoumá schémata elektrického pohonu některých dopravníků. Na Obr. 1 schematicky znázorňuje elektrický pohon jednotlivých dopravníkových linek, jejichž rychlosti musí být striktně stejné. Taková potřeba vyvstává při kontinuální výrobě, kdy se různé výrobky po nezbytných technologických operacích na samostatných linkách musí na místě montáže setkat v přísném vzájemném souladu.
Schéma umožňuje současně spustit a zastavit několik dopravníkových linek a upravit jejich rychlost. Koordinovaného pohybu je dosaženo spínáním motorů podle schématu synchronního hřídele se společným invertorovým frekvenčním měničem. Regulace otáček motorů D1 a D2 se provádí změnou otáček měniče pomocí převodovky P s proměnným poměrem.
Povolení ke spuštění dopravníků dávají operátoři, kteří sledují provoz dopravníků v nejkritičtějších oblastech. Po stisku tlačítek připravenosti G1 a G2 se rozsvítí signální kontrolky LS1 a LS2 a jsou aktivována relé RG1 a RG2. Ten připraví relé na spuštění RP.
Když stisknete tlačítko Start, spustí se RP, čímž se zapne stykač L1. Je zde jednofázová synchronizace polohy měniče, D1 a D2. Po časových prodlevách kyvadlová relé zabudovaná do stykačů L1 a L2 střídavě zapínají L2, vypínají L1 a zapínají LZ. Start reostatu motoru frekvenčního měniče se provádí podle časového principu (časová relé RU1, RU2, RUZ).
Na Obr. 2 ukazuje schéma elektrického pohonu eskalátoru metra, který umožňuje pracovat na stoupání a klesání cestujících. Jako hnací motor je použit asynchronní motor s fázovým rotorem o výkonu až 200 kW. V určitých denních dobách, při nevýznamném toku cestujících, může eskalátor pracovat dlouhou dobu téměř naprázdno.
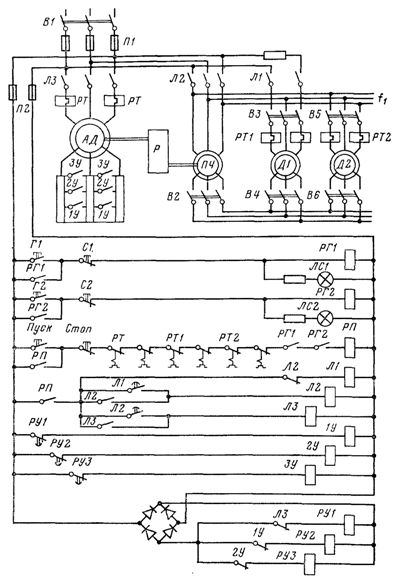
Rýže. 1. Schéma elektrického pohonu dopravníkových linek s koordinovaným pohybem.
Pro zvýšení účiníku a účinnosti motoru se při snížení zatížení jeho hřídele na cca 40 % jmenovité hodnoty vinutí statoru přepne z trojúhelníku na hvězdu. Jak se zatížení zvyšuje, přechází zpět do trojúhelníku.
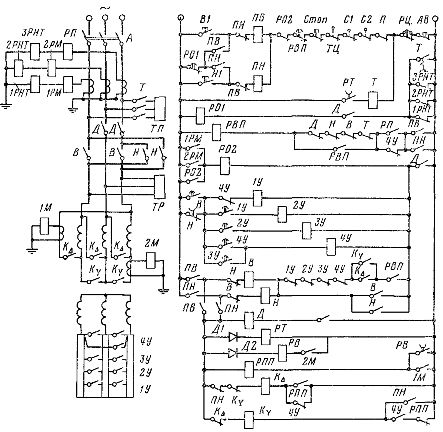
Rýže. 2. Schéma elektrického pohonu eskalátoru metra.
Uvedené spínání je prováděno automaticky nadproudovými relé 1M a 2M, která prostřednictvím relé RPP a РВ ovládají stykače k∆ a kY. Kontakt se zpožděním otevření RV zajišťuje přítomnost obvodu cívky RPP v době mezi 2M vypnuto a 1M zapnuto.
V režimu klesání generátoru s plnou zátěží je motor zatěžován podstatně méně (kvůli mechanickým ztrátám instalace) než při podobné zátěži v režimu stoupání.V klesajícím režimu je proto statorové vinutí motoru vždy zapojeno do hvězdy. Motor se spouští jako funkce času pomocí kyvadlových relé na stykačích akcelerátoru 1U-4U. Zarážka je mechanická. V tomto případě je provozní brzda TP instalována na hřídeli motoru a bezpečnostní TP je instalována na hřídeli hnacího ozubeného kola, aby se zajistilo, že se žebřík zastaví, pokud se přeruší mechanické spojení mezi ozubeným kolem a hřídelemi motoru.
Obvod implementuje typická bezpečnostní blokování popsaná v předchozí části: z poruchy mechanické části zařízení — odstranění řetězů a zábradlí (koncové spínače TC, P), porušení struktury stupňů (koncové spínače C1 a C2 ), nadměrná teplota ložisek ( tepelné relé 7), z překročení otáček (relé odstředivých otáček RC).
Navíc je zajištěna ochrana motoru: maximální (relé 1RM, 2RM), před přetížením (relé RP), před ztrátou výkonu od motoru (nulové proudové relé 1RNT, 2RNT, 3RNT), před přivařením zapínacích kontaktů výkonových stykačů (rozpínací kontakty D, Y, B, T v obvodu cívky RVP a 1U-4U v obvodu cívky B).
Ochrana proti ztrátě výkonu, přehřátí ložisek a přetížení motoru pracuje s časovým zpožděním určeným časovým relé PO1 a RVP. Všechny ochrany kromě rychlostního relé dálkového ovládání zastaví motor jeho odpojením od sítě a zatažením provozní brzdy TP. Teprve na konci procesu brzdění, po uplynutí zpoždění relé PT, je dodatečně aktivována bezpečnostní brzda TP.Když je aktivováno rychlostní relé RC nebo je stisknuto tlačítko nouzového zastavení, obě brzdy se aktivují současně.