Automatické řídicí obvody pro spouštění a zastavování stejnosměrných motorů
 Startování jakéhokoli motoru je doprovázeno určitými spínači v napájecím a řídicím obvodu. V tomto případě se používají relé-stykač a bezkontaktní zařízení. Pro stejnosměrné motory na omezení startovací proudy V obvodu rotoru a kotvy motorů jsou obsaženy spouštěcí odpory, které se při stupňovitém zrychlování motorů vypínají. Po dokončení spouštění jsou spouštěcí odpory zcela přemostěny.
Startování jakéhokoli motoru je doprovázeno určitými spínači v napájecím a řídicím obvodu. V tomto případě se používají relé-stykač a bezkontaktní zařízení. Pro stejnosměrné motory na omezení startovací proudy V obvodu rotoru a kotvy motorů jsou obsaženy spouštěcí odpory, které se při stupňovitém zrychlování motorů vypínají. Po dokončení spouštění jsou spouštěcí odpory zcela přemostěny.
Proces brzdění motorů lze také automatizovat. Po povelu k zastavení se pomocí zařízení relé-stykač provedou potřebné spínače v silových obvodech. Při přiblížení rychlosti blízké nule se motor odpojí od sítě. Během spouštění se kroky vypínají v pravidelných intervalech nebo v závislosti na jiných parametrech. Tím se změní proud a rychlost motoru.
Řízení spouštění motoru se provádí jako funkce EMF (neboli rychlosti), proudu, času a dráhy.
Typické podsestavy a obvody pro automatické řízení spouštění stejnosměrných motorů
Spouštění stejnosměrného motoru s paralelním nebo nezávislým buzením se provádí odporem zavedeným v obvodu kotvy. K omezení zapínacího proudu je nutný odpor. Jak motor zrychluje, startovací odpor je stupňovitý. Po dokončení startu bude rezistor zcela přemostěn a motor se vrátí ke svým přirozeným mechanickým vlastnostem (obr. 1). Při startu motor zrychluje podle umělé charakteristiky 1, poté 2 a po manévrování s odporem - podle přirozené charakteristiky 3.
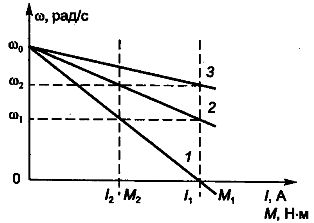
Rýže. 1. Mechanické a elektromechanické vlastnosti stejnosměrného motoru s paralelním buzením (ω — úhlová rychlost otáčení; I1 M1 — špičkový proud a moment motoru; I2 M2 — proud a spínací moment)
Uvažujme uzel spouštěcího obvodu stejnosměrného motoru (DCM) ve funkci EMF (obr. 2).
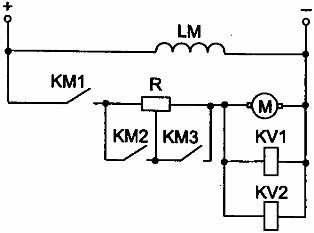
Rýže. 2. Uzel startovacího obvodu DCT paralelního buzení ve funkci EMF
Funkce EMF (neboli rychlost) je řízena relé, napětími a stykači. Napěťová relé jsou konfigurována tak, aby pracovala při různých hodnotách emf kotvy. Když je stykač KM1 zapnutý, napětí relé KV v době spuštění nestačí k provozu. Když motor zrychluje (v důsledku zvýšení emf motoru), aktivuje se relé KV1, poté KV2 (aktivační napětí relé mají odpovídající hodnoty); zahrnují zrychlovací stykače KM2, KMZ a odpory v obvodu kotvy jsou bočníkové (spínací obvody stykačů nejsou ve schématu znázorněny, LM je budicí vinutí).
Podívejme se na schéma spouštění stejnosměrného motoru ve funkci EMF (obr. 3). Úhlová rychlost motoru je často fixována nepřímo, tzn.měření veličin souvisejících s rychlostí. U stejnosměrného motoru je takovou hodnotou EMF. Start se provádí následovně. Jistič QF se zapne, pole motoru je připojeno k napájení. Relé KA sepne a sepne svůj kontakt.
Zbývající zařízení obvodu zůstávají v původní poloze. Chcete-li nastartovat motor, musíte zmáčknout tlačítko SB1 «Start», po kterém se aktivuje stykač KM1 a připojí motor ke zdroji energie. Stykač KM1 je samonapájený. Stejnosměrný motor je urychlován odporem R obvodu kotvy motoru.
S rostoucími otáčkami motoru se zvyšuje jeho emf a napětí v cívkách relé KV1 a KV2. Při rychlosti ω1 (viz obr. 1.) se aktivuje relé KV1. Sepne svůj kontakt v obvodu stykače KM2, který svým kontaktem vybaví a zkratuje první stupeň spouštěcího odporu. Při rychlosti ω2 se sepne relé KV2. Svým kontaktem sepne napájecí obvod stykače KMZ, který při aktivaci kontaktem zkratuje druhý rozběhový stupeň rozběhového odporu. Motor dosáhne svých přirozených mechanických vlastností a ukončí vzlet.
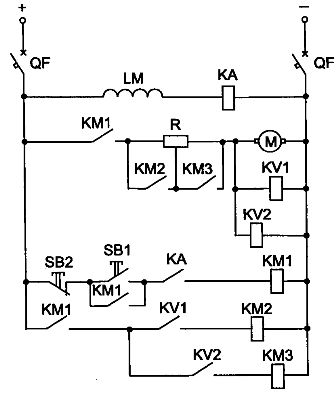
Rýže. 3. Schéma spouštění DCT paralelního buzení ve funkci EMF
Pro správnou funkci obvodu je nutné nastavit napěťové relé KV1 tak, aby pracovalo na EMF odpovídající otáčkám ω1 a relé KV2, aby pracovalo na otáčky ω2.
Pro zastavení motoru stiskněte tlačítko Stop SB2. Chcete-li odpojit elektrický obvod, otevřete jistič QF.
Proudová funkce je řízena proudovým relé. Zvažte uzel obvodu spouštěče stejnosměrného motoru ve funkci toku. V diagramu na Obr.4 jsou použita nadproudová relé, která nabírají při náběhovém proudu I1 a odpadnou při minimálním proudu I2 (viz obr. 1). Interní doba odezvy proudových relé musí být kratší než doba odezvy stykače.
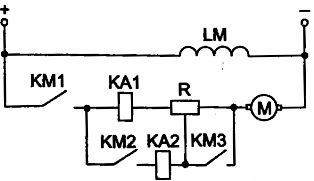
Rýže. 4. Uzel spouštěcího obvodu paralelního buzení DCT v závislosti na proudu
Zrychlení motoru začíná při úplném zasunutí rezistoru do obvodu kotvy. Při akceleraci motoru proud klesá, s proudem I2 relé KA1 mizí a svým kontaktem uzavírá napájecí obvod stykače KM2, který svým kontaktem obchází první kontakt rozběhového odporu. Podobně je zkratován i druhý spouštěcí stupeň rezistoru (relé KA2, stykač KMZ). Výkonové obvody stykače nejsou ve schématu znázorněny. Na konci rozběhu motoru dojde k přemostění rezistoru v obvodu kotvy.
Uvažujme obvod pro spouštění stejnosměrného motoru jako funkci toku (obr. 5). Odpory odporových stupňů jsou voleny tak, aby v okamžiku zapnutí motoru a posunutí stupňů proud I1 v obvodu kotvy a moment M1 nepřekročily přípustnou úroveň.
Spuštění stejnosměrného motoru se provádí zapnutím jističe QF a stisknutím tlačítka «Start» SB1. V tomto případě se stykač KM1 aktivuje a sepne své kontakty. Výkonovým obvodem motoru prochází zapínací proud I1, pod jehož vlivem se aktivuje nadproudové relé KA1. Jeho kontakt se rozepne a stykač KM2 není napájen.
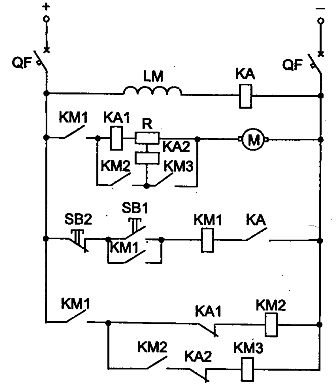
Rýže. 5. Schéma paralelního buzení spouštění DCT jako funkce proudu
Při poklesu proudu na minimální hodnotu I2 nadproudové relé KA1 klesne a sepne svůj kontakt.Stykač KM2 se aktivuje a přes svůj hlavní kontakt odpojí první sekci rozběhového odporu a relé KA1. Při přepínání proud stoupne na hodnotu I1.
Když se proud opět zvýší na hodnotu I1, stykač KM1 se nesepne, protože jeho cívka je přemostěna kontaktem KM2. Vlivem proudu I1 se aktivuje relé KA2 a rozepne svůj kontakt. Když v procesu zrychlování proud opět klesne na hodnotu I2, relé KA2 klesne a sepne stykač KMZ. Start je kompletní, motor pracuje se svými přirozenými mechanickými vlastnostmi.
Pro správnou funkci obvodu je nutné, aby doba odezvy relé KA1 a KA2 byla menší než doba odezvy stykačů. Chcete-li motor zastavit, stiskněte tlačítko «Stop» SB2 a vypněte jistič QF pro odpojení obvodu.
Časové řízení se provádí pomocí časového relé a odpovídajících stykačů, které svými kontakty zkratují odporové stupně.
Uvažujte uzel spouštěcího obvodu stejnosměrného motoru jako funkci času (obr. 6) Časové relé KT se aktivuje okamžitě, když se v řídicím obvodu objeví napětí přes rozpínací kontakt KM1. Po rozepnutí kontaktu KM1 ztratí časové relé KT napájení a sepne kontakt s časovým zpožděním. Stykač KM2 po časovém intervalu rovném časové prodlevě časového relé přijme napájení, sepne svůj kontakt a odpojí odpor v obvodu kotvy.
Rýže. 6. Uzel spouštěcího obvodu DCT paralelního buzení jako funkce času
Mezi výhody řízení ve funkci času patří snadné ovládání, stabilita procesu zrychlování a zpomalování, absence zpoždění elektrického pohonu při středních rychlostech.
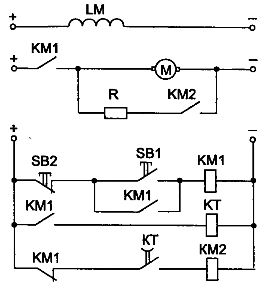
Zvažte obvod pro spouštění paralelního buzení stejnosměrného motoru jako funkci času. Na Obr. 7 znázorňuje schéma nevratného startu stejnosměrného paralelního budícího motoru. Spuštění probíhá ve dvou fázích. Obvod využívá tlačítka SB1 «Start» a SB2 «Stop», stykače KM1 ... KMZ, elektromagnetická časová relé KT1, KT2. Jistič QF se zapne. V tomto případě je cívka časového relé KT1 napájena a otevírá svůj kontakt v obvodu stykače KM2. Motor se nastartuje stisknutím tlačítka «Start» SB1. Stykač KM1 přijímá napájení a svým hlavním kontaktem připojuje motor k napájecímu zdroji s odporem v obvodu kotvy.
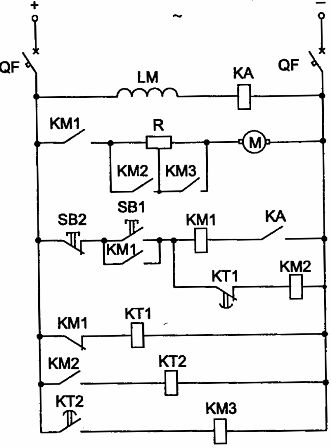
Rýže. 7. Schéma nevratného rozběhu stejnosměrného motoru v závislosti na čase
Podproudové relé KA slouží k ochraně motoru před přerušením budícího obvodu. Během normálního provozu relé KA sepne a jeho kontakt v obvodu stykače KM1 se sepne, čímž je stykač KM1 připraven k provozu. Při přerušení budícího obvodu relé KA vypne, rozepne svůj kontakt, poté se vypne stykač KM1 a motor se zastaví. Při sepnutí stykače KM1 se sepne jeho blokovací kontakt a rozepne kontakt KM1 v reléovém obvodu KT1, který s časovým zpožděním vypne a sepne svůj kontakt.
Po časovém intervalu rovném časové prodlevě relé KT1 se sepne napájecí obvod zrychlovacího stykače KM2, který se spustí a svým hlavním kontaktem zkratuje jeden stupeň rozběhového odporu. Současně se sepne časové relé KT2. Motor zrychluje. Po časovém intervalu rovném zpoždění relé KT2 se sepne kontakt KT2, aktivuje se zrychlovací stykač KMZ a svým hlavním kontaktem kontaktuje druhý stupeň rozběhového odporu v obvodu kotvy. Start je dokončen a motor se vrátí ke svým přirozeným mechanickým vlastnostem.
Typické jednotky řídicího obvodu stejnosměrné brzdy
Automatické řídicí systémy stejnosměrného motoru využívají dynamické brzdění, opačné brzdění a rekuperační brzdění.
Při dynamickém brzdění je nutné uzavřít vinutí kotvy motoru na přídavný odpor a nechat budicí vinutí pod napětím. Toto brzdění může být provedeno jako funkce rychlosti a jako funkce času.
Řízení jako funkce rychlosti (EMF) při dynamickém brzdění lze provádět podle schématu na obr. 8. Při vypnutí stykače KM1 je kotva motoru odpojena od sítě, ale na jejích svorkách je v okamžiku odpojení napětí. Napěťové relé KV sepne a sepne svůj kontakt v obvodu stykače KM2, který svým kontaktem sepne kotvu motoru k rezistoru R.
Při otáčkách blízkých nule ztrácí KV relé napájení. K dalšímu zpomalení z minimální rychlosti na úplné zastavení dochází působením statického momentu odporu.Pro zvýšení účinnosti brzdění lze použít dva nebo tři stupně brzdění.
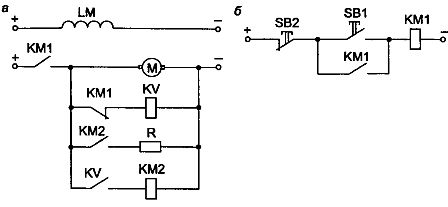
Rýže. 8. Uzel obvodu pro automatické řízení dynamického brzdění ve funkci EMF: a — silový obvod; b — řídicí obvod
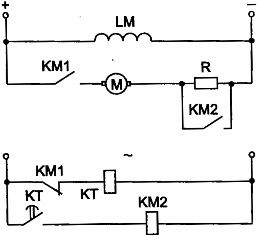
Dynamické brzdění konstantní buzení nezávislé na motoru jako funkce času se provádí podle schématu na obr. devět.
Rýže. 9. Uzel obvodu dynamického brzdění DCT nezávislého buzení jako funkce času
Při běžícím motoru je časové relé KT sepnuto, ale obvod brzdového stykače KM2 je rozpojený. Chcete-li zastavit, musíte stisknout tlačítko "Stop" SB2. Stykač KM1 a časové relé KT ztrácí napájení; stykač KM2 je aktivován, protože kontakt KM1 v obvodu stykače KM2 sepne a kontakt časového relé KT rozepne s časovým zpožděním.
Pro časování časového relé přijme stykač KM2 napájení, sepne svůj kontakt a připojí kotvu motoru k přídavnému odporu R. Provede se dynamické zastavení motoru. Na jeho konci relé KT po nějaké době rozepne kontakt a odpojí stykač KM2 od sítě. Další brzdění až do úplného zastavení se provádí pod vlivem momentu odporu Ms.
Při zpětném brzdění působí EMF motoru a síťové napětí v souladu. Pro omezení proudu je do obvodu vložen rezistor.
Řízení buzení stejnosměrných motorů
Budící vinutí motoru má značnou indukčnost a při rychlém vypnutí motoru se na něm může objevit velké napětí, které způsobí porušení izolace vinutí. Abyste tomu zabránili, můžete použít uzly obvodu zobrazené na obr.10. Zhášecí odpor se zapíná paralelně s budicí cívkou přes diodu (obr. 10, b). Proto po vypnutí prochází proud na krátkou dobu odporem (obr. 10, a).

Rýže. 10. Uzly obvodů pro zapínání zhášecích odporů: a — zhášecí odpor je zapojen paralelně; b — zhášecí odpor se zapíná přes diodu.
Ochrana proti přerušení budícího obvodu se provádí pomocí podproudového relé podle schématu na obr. jedenáct.

Rýže. 11. Ochrana proti přerušení budícího obvodu: a — silový budicí obvod; b — řídicí obvod
V případě přerušení budicí cívky relé KA odbudí a rozpojí obvod stykače KM.