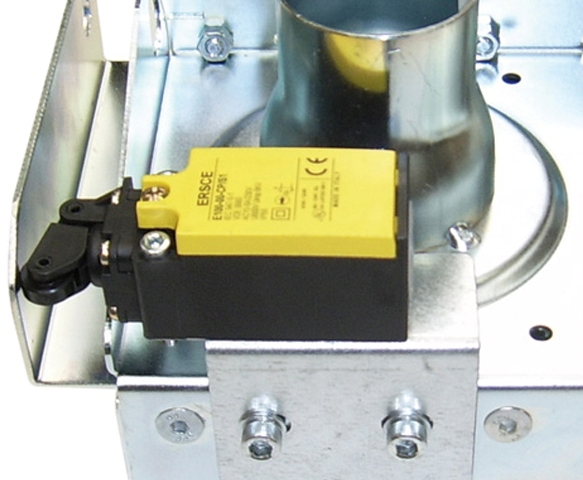
Porovnání kontaktních a bezkontaktních pojezdových spínačů
V průmyslové automatizaci jsou obvody široce používány pojezdové (polohové) spínače a výhybky vícenásobné konstrukce určené k ovládání polohy různých výrobních mechanismů a založené na transformaci pohybu těchto mechanismů v elektrickém signálu.
Polohové spínače lze použít i k provádění jiných funkcí, než je polohové řízení výrobních mechanismů, například ovládání úhlu natočení, hladiny, přítlaku hmotnosti atd.

Směrové spínače jsou zařízení s diskrétním působením, pracující na principu zvýšení, to znamená, že reagují pouze na změnu polohy ovládaného mechanismu. Výstupní signál směrových spínačů je nejednoznačnou funkcí pohybu mechanismu z dané výchozí polohy.
Typy silničních výhybek
V závislosti na principech polohového přepínání se způsob přepínání dělí na:
-
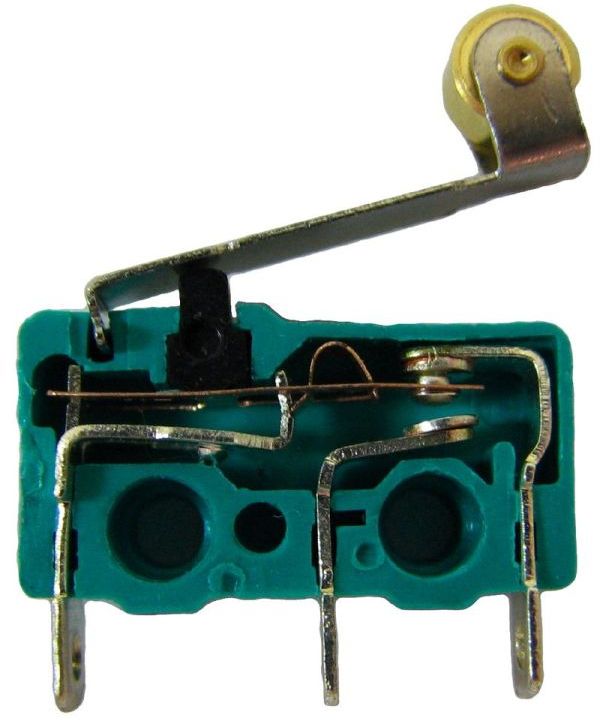
mechanický kontakt se spínacími kontakty a prvky citlivými na kontakt;
-
statický kontakt (magnetomechanický), jehož citlivý prvek je bezkontaktní a spínací prvek je kontakt;
-
statické bezkontaktní, citlivé a spínací prvky, ze kterých jsou bezkontaktní vyrobeny.
V kontaktní povaze uzlu "spínací - stop", to znamená v kontaktní povaze spojení hnacího prvku (vstupního řídicího signálu) s citlivým prvkem, se tento uzel nazývá mechanický a v bezkontaktním - statický .
V závislosti na provedení lze spínače kombinovat nebo oddělovat. V prvním případě jsou citlivé a spínací prvky umístěny v jednom pouzdře a jsou konstrukčně provedeny jako celek. Ve druhém může být citlivý prvek umístěn ve vzdálenosti několika desítek a stovek metrů od spínače.
Zkreslení magnetického pole dráhového spínače je dosaženo změnou parametrů magnetický obvod citlivý prvek. Variabilními parametry může být aktivní plocha a také velikost vzduchové mezery magnetická permeabilita magnetický obvod.
V současné době se oblast použití mechanických kontaktních polohových spínačů v průmyslové automatizaci zužuje a vyvstává otázka zbytečnosti polohových spínačů tohoto typu pro účely budování automatických řídicích systémů.
To poslední je způsobeno následujícím:
-
Složitost konstrukce sestavy spínač-doraz, vzhledem k přísnosti požadavků na meze přípustného kolísání řady parametrů, způsobuje značné potíže při její výrobě a seřizování.
-
Poměrně vysoká kritičnost charakteristik přesnosti tohoto zařízení na vliv destabilizujících faktorů (opotřebení styčných ploch, uvolněnost upevňovacích prvků, nesouosost pohyblivých prvků atd.).
Řadu konstrukčních řešení mechanismů na bázi mechanických kontaktních spínačů nelze vůbec realizovat. Patří mezi ně mechanismy, které vyžadují vysoké přípustné úrovně rychlosti a frekvence pohybových spínačů.
Pokud lze požadovanou rychlost chodu silniční výhybky snížit v důsledku dalších kinematických vazeb mechanismu, které mimo jiné zhoršují kvalitativní charakteristiky řídicího systému (zejména parametry přesnosti), pak přípustná pracovní frekvence ( rozlišení) nemusí být zvýšeno strukturálními komplikacemi.
Viz také: Montáž koncových spínačů a spínačů
Jaký je v tomto případě důvod pro rozšířené používání principu mechanického kontaktu přepínání polohy? Odpověď na tuto otázku je třeba hledat ve dvou aspektech: ve stávajících principech konstrukce automatických řídicích systémů a ve výhodách spínacího obvodu kontaktní cesty.
Výhody přepínačů kontaktních cest
Mechanické kontaktní spínače, obvykle realizované s víceobvodovým výstupem, se vyznačují následujícími výhodami:
-
vysoký spínací poměr;
-
vysoký specifický regulační výkon (poměr zahrnutého výkonu k celkovým rozměrům);
-
univerzálnost, tedy schopnost spínat obvody stejnosměrného i střídavého proudu;
-
velký rozsah zahrnutých napětí;
-
zanedbatelná vnitřní spotřeba energie (malá hodnota přechodového odporu kontaktů v sepnutém stavu);
-
malá závislost přesnosti a stability provozu na změnách řízeného výkonu.
Nevýhody spínačů kontaktních cest
Princip mechanického kontaktu těchto zařízení často neumožňuje splnit zvýšené požadavky na spolehlivost, životnost a přesnost automatizačních systémů. Mechanické kontaktní spínače jsou navíc velmi citlivé na působení různých klimatických faktorů (zejména při nízkých teplotách).
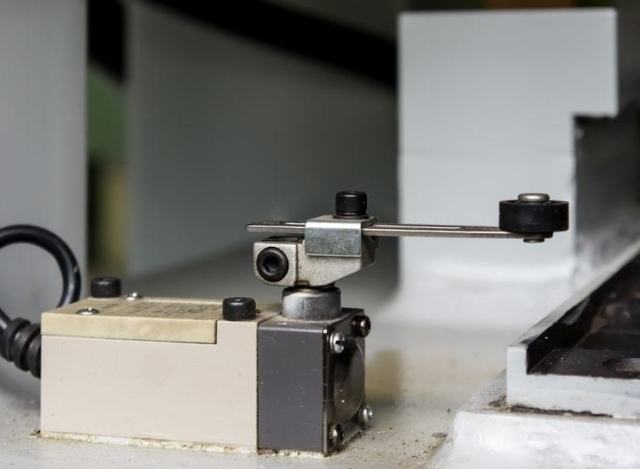
Mechanické kontaktní spínače se vyznačují omezenými přípustnými úrovněmi maximální a minimální rychlosti pohybu spínacího dorazu, které se pohybují v rozmezí 0,3 — 30 m/min a zvýšení rychlosti spínacího dorazu nad přípustnou úroveň vede k prudkému poklesu v mechanické odolnosti na spínači.
U takových spínačů jsou dovolené odchylky směru působení spínací síly vůči ose páky velmi malé a jejich překročení vede k mechanickému poškození, zejména u spínačů s předním táhlem.
Aby se získaly charakteristiky reléového výstupu (regulační charakteristiky), jsou v konstrukci takových spínačů poskytnuta zařízení spouštěcí pružiny. Požadovaného stupně výstupních charakteristik relé je dosaženo za cenu výrazného snížení životnosti spínače v důsledku velkých dynamických pnutí vyskytujících se ve spouště v době sepnutí.
U mechanických mžikových spínačů dosahuje šířka hysterezní smyčky (rozdíl zdvihu) výstupní charakteristiky značné hodnoty, což je pro řadu technologických procesů zcela nepřijatelné z důvodu neproduktivního prodloužení doby zpracovatelského cyklu.
Snížení rozdílu ve zdvihu těchto přehazovaček souvisí buď se zvýšením složitosti jejich konstrukce, nebo se zvětšením jejich velikosti. Kromě toho jsou v některých případech nutné značné mechanické síly k ovládání mechanických kontaktních spínačů.
Výhody a nevýhody bezdotykových spínačů
Výše uvedené okolnosti vedou k potřebě vyvinout zařízení, která postrádají uvedené nevýhody a zároveň jsou schopna plnit obdobné funkce. Taková zařízení jsou bezdotykové spínače, mezi jehož výhody patří:
-
výrazná životnost s vysokou spolehlivostí a vysokou přípustnou provozní frekvencí;
-
není potřeba mechanické námahy při ovládání, nízká citlivost na vibrace, zrychlení atd.;
-
nevýznamná citlivost parametrů na změny v poměrně širokém spektru vnějších podmínek;
-
zlepšení podmínek provozních služeb.
Díky nízké úrovni zpětné vazby bezdotykového spínače je dosaženo výrazného zjednodušení konstrukce stop spínače při zachování vysoké stability charakteristik přesnosti v čase. Absence elektrických a mechanických kontaktů navíc zajišťuje požární a výbuchovou bezpečnost těchto zařízení, což výrazně rozšiřuje oblast jejich možné aplikace.
Jednou z významných nevýhod bezkontaktních koncových spínačů je složitost implementace mnoha konstrukčních úprav, které jsou snadno implementovatelné do mechanických kontaktních koncových spínačů.
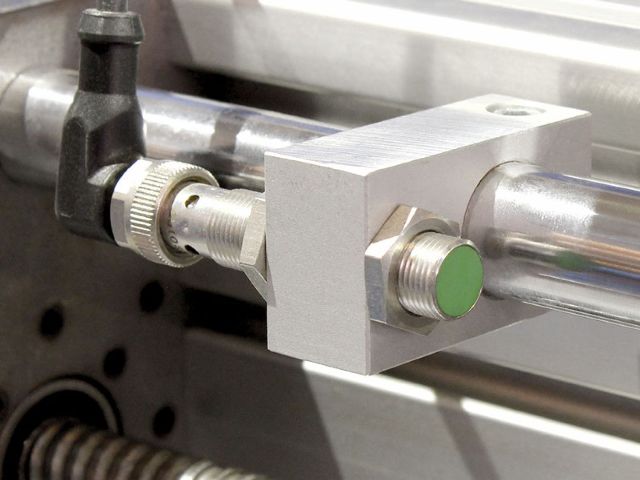
Zařízení pro přiblížení
Princip činnosti statických bezkontaktních dráhových spínačů parametrického typu je založen na využití zkreslení magnetického nebo elektrického pole vytvářeného citlivým prvkem, když se v jeho oblasti objeví hnací prvek, v důsledku čehož dojde k nevyváženému stavu. dojde v elektrickém obvodu spínače a výstupní zařízení se spustí.
Statické bezdotykové spínače jsou nejčastěji vyráběny s jedním výstupním obvodem a u některých spínačů je aktivace doprovázena výskytem signálu na výstupu (přímý spínací efekt), v jiných - zmizením (reverzní spínací efekt), což je ekvivalentní na spínací a rozpínací kontakty mechanických kontaktních drah.
Pokud je v obvodu reléového přibližovacího spínače zesilovací prvek, může být výstupní parametr snímacího prvku v trvalé funkční závislosti na řízeném pohybu.
V současné době se používají četné konstrukční úpravy bezdotykových spínačů pojezdu, lišící se úrovní citlivosti (velikost pracovní mezery), umístěním štěrbiny nebo roviny citlivého prvku vzhledem k montážní rovině, směrem náběhové vodiče, počet kroků snímacího prvku (u provedení se štěrbinami), hloubku štěrbiny, délku připojovacích vodičů, úroveň napájecího napětí, charakter ochrany před vlivy prostředí atd.
Možnosti použití bezkontaktních pohybových spínačů jsou dány parametry jejich elektrických a mechanických charakteristik.
Mezi elektrické parametry patří:
- charakter výstupního signálu a počet výstupních obvodů;
- spotřeba a výstupní výkon;
- tvar výstupního signálu; spínací koeficient pro odpor a napětí (pro spínače typu transformátoru);
- charakteristiky časování (časy spouštění a uvolnění) a frekvence střelby (rozlišení);
- úrovně a tvar napájecího napětí, jakož i přípustné meze jejich odchylek.
Mezi mechanické parametry výkonu patří:
- citlivost (velikost pracovní mezery),
- rozměry a rozměry připojení;
- charakteristiky přesnosti (hlavní a dodatečné chyby) a diferenciál zdvihu;
- vlastnosti instalace (typy spínacích brzd a způsob jejich instalace, úroveň zpětné vazby, způsob montáže a instalace spínače);
- úroveň ochrany proti hluku.
Další informace o zařízení a přepínačích pro přiblížení naleznete zde: Bezdotykové snímače polohy mechanismů
Ivenski Yu. N.Bezkontaktní pojezdové spínače v průmyslové automatizaci