Moderní bezkomutátorové stejnosměrné motory
Díky významnému pokroku v polovodičové elektronice a technologii vytváření výkonných neodymových magnetů jsou dnes bezkomutátorové stejnosměrné motory široce používány. Používají se v pračkách, vysavačích, ventilátorech, dronech atd.
A přestože myšlenka principu fungování bezkomutátorového motoru byla vyslovena již na počátku 19. století, čekala v křídlech až do začátku polovodičové éry, kdy byly technologie připraveny pro praktickou realizaci tento zajímavý a účinný koncept, který umožnil bezkomutátorovým stejnosměrným motorům chodit tak široce jako dnes. …
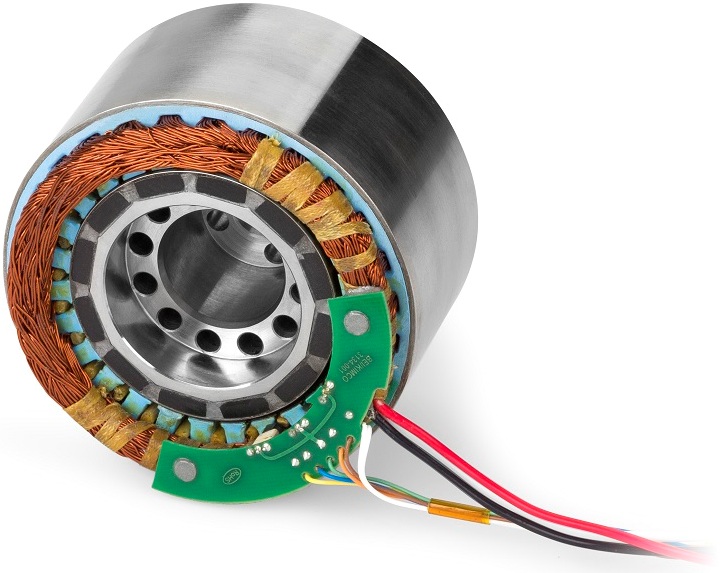
V anglické verzi se jim říká motory tohoto typu BLDC motor — Bezkomutátorové stejnosměrné motory — bezkomutátorový stejnosměrný motor. Rotor motoru obsahuje permanentní magnety, a pracovní vinutí jsou umístěna na statoru, to znamená, že zařízení BLDC motoru je zcela opačné než u klasického kartáčovaného motoru. BLDC motor je řízen elektronickým ovladačem tzv ESC — Elektronický regulátor rychlosti — elektronický tempomat.
Elektronický regulátor a vysoká účinnost
Elektronický regulátor umožňuje plynulou změnu elektrické energie dodávané do bezkomutátorového motoru. Na rozdíl od jednodušších verzí odporových regulátorů otáček, které jednoduše omezují výkon připojením odporové zátěže do série s motorem, čímž se přebytečný výkon přeměňuje na teplo, poskytuje elektronická regulace otáček výrazně vyšší účinnost bez plýtvání dodávanou elektrickou energií.energie na zbytečné zahřívání. ..
Bezkomutátorový stejnosměrný motor lze klasifikovat jako samosynchronní synchronní motor, kde je zapalovací uzel vyžadující pravidelnou údržbu zcela vypnut — kolektor… Funkci kolektoru přebírá elektronika, díky které se celá konstrukce výrobku výrazně zjednoduší a stane se kompaktnější.
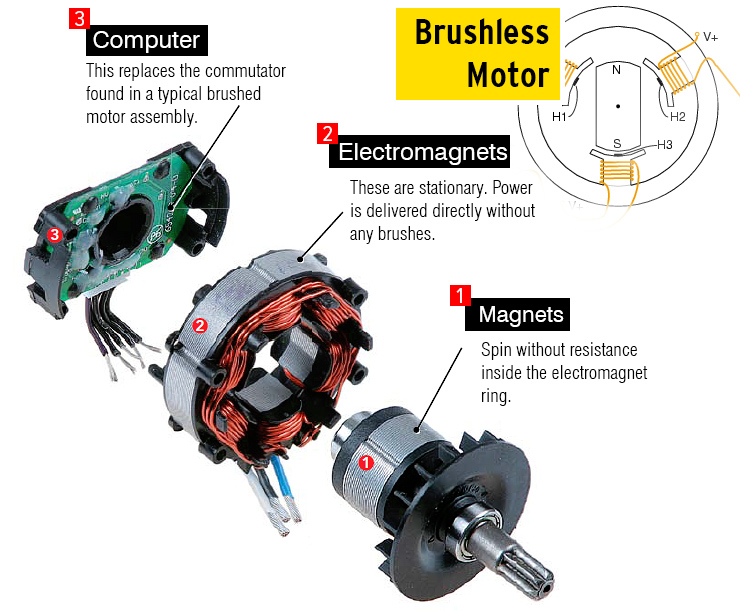
Kartáče jsou vlastně nahrazeny elektronickými spínači, u kterých jsou ztráty mnohem menší, než by byly u mechanického spínání. Výkonné neodymové magnety na rotoru umožňují větší točivý moment na hřídeli. A takový motor se zahřívá méně než jeho sběratelský předchůdce.
V důsledku toho je účinnost motoru nejlepší a výkon na kilogram hmotnosti je vyšší, plus poměrně široký rozsah regulace otáček rotoru a téměř úplná absence generovaného rádiového rušení. Konstrukčně jsou motory tohoto typu snadno přizpůsobeny pro práci ve vodě a v agresivním prostředí.
Elektronická řídicí jednotka je velmi důležitou a nákladnou součástí bezkomutátorového stejnosměrného motoru, ale nelze se jí obejít.Z tohoto zařízení dostává motor výkon, jehož parametry současně ovlivňují jak otáčky, tak výkon, který bude motor schopen vyvinout při zatížení.
I když rychlost otáčení není třeba upravovat, je stále potřeba elektronická řídicí jednotka, protože nese pouze řídicí funkci, ale má také napájecí součást. Dá se říci, že ESC je analog frekvenční regulátor pro asynchronní střídavé motoryspeciálně navržený pro napájení a ovládání bezkomutátorového stejnosměrného motoru.
BLDC ovládání motoru
Abychom pochopili, jak se BLDC motor ovládá, připomeňme si nejprve, jak funguje komutátorový motor. Ve svém jádru princip rotace rámu proudem v magnetickém poli.
Pokaždé, když se rám s proudem otočí a najde rovnovážnou polohu, změní komutátor (kartáče přitisknuté ke kolektoru) směr proudu rámem a rám pokračuje dál. Tento proces se opakuje, když se rám pohybuje od tyče k tyči. Pouze v motoru kolektoru je takových rámů mnoho a existuje několik párů magnetických pólů, proto kartáčový kolektor neobsahuje dva kontakty, ale mnoho.
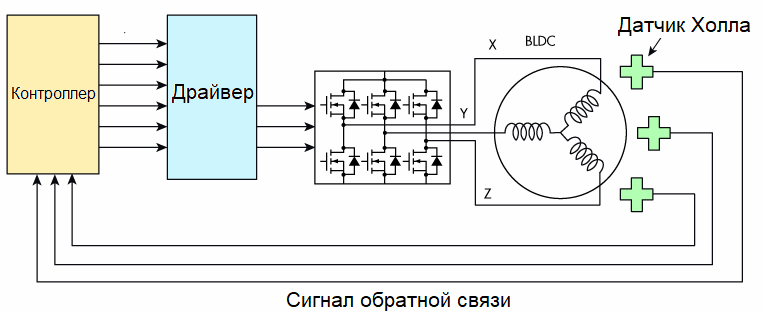
ECM dělá totéž. Obrátí polaritu magnetického pole, jakmile se rotor musí otočit z rovnovážné polohy. Pouze řídicí napětí není přiváděno do rotoru, ale do vinutí statoru, a to pomocí polovodičových spínačů ve správný čas (fáze rotoru).
Je zřejmé, že proud do vinutí statoru bezkomutátorového motoru musí být dodáván ve správný čas, tedy když je rotor v určité známé poloze. Chcete-li to provést, použijte jednu z následujících metod.První je založen na snímači polohy rotoru, druhý je založen na měření EMF jedné z cívek, která aktuálně není napájena.
Senzory jsou různé, magnetické a optické, nejoblíbenější jsou magnetické senzory Hallův efekt… Druhá metoda (založená na měření EMF), přestože je účinná, neumožňuje přesné řízení při nízkých rychlostech a při rozběhu. Hallovy senzory naopak poskytují přesnější ovládání ve všech režimech. V třífázových BLDC motorech jsou tři takové snímače.
Motory bez snímačů polohy rotoru jsou použitelné v případech, kdy se motor spouští bez zatížení hřídele (ventilátor, vrtule atd.). Pokud se spouštění provádí pod zatížením, je vyžadován motor se snímači polohy rotoru. Obě možnosti mají svá pro a proti.
Řešení se senzorem se promění v pohodlnější ovládání, ale pokud alespoň jeden ze senzorů selže, bude nutné motor rozebrat, navíc senzory vyžadují samostatné vodiče. V bezsenzorové verzi nejsou potřeba žádné speciální dráty, ale při spouštění se rotor bude kývat dopředu a dozadu. Pokud je to nepřijatelné, je nutné do systému nainstalovat čidla.
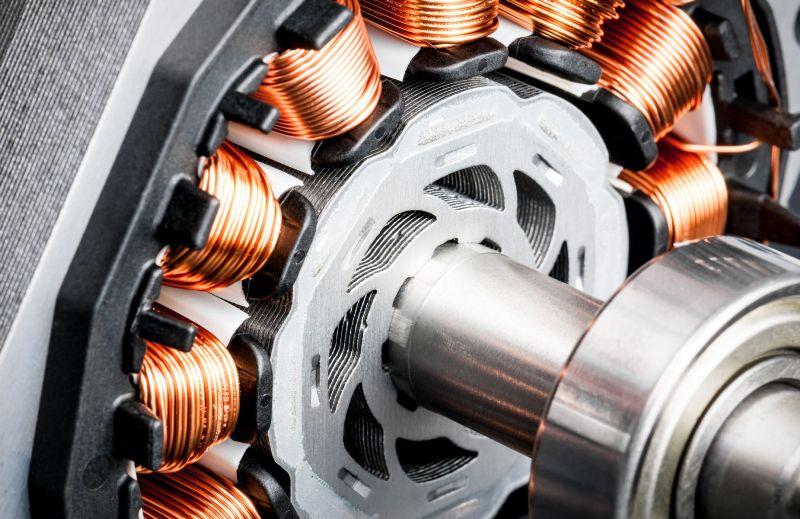
Rotor a stator, počet fází
Rotor motoru BLDC může být vnější nebo vnitřní a stator vnitřní nebo vnější. Stator je vyroben z magneticky vodivého materiálu, přičemž počet zubů je zcela vydělen počtem fází. Rotor může být vyroben ne nutně z magneticky vodivého materiálu, ale nutně s magnety pevně k němu připevněnými.

Čím silnější jsou magnety, tím větší je dostupný točivý moment. Počet zubů statoru by se neměl rovnat počtu magnetů rotoru.Minimální počet zubů se rovná počtu kontrolních fází.
Většina moderních bezkomutátorových stejnosměrných motorů je třífázová, jednoduše kvůli jednoduchosti konstrukce a ovládání. Stejně jako u střídavých indukčních motorů jsou zde vinutí tří fází spojena se statorem „trojúhelníkem“ nebo „hvězdou“.
Takové motory bez snímačů polohy rotoru mají 3 napájecí vodiče a motory se snímači mají 8 vodičů: dva další vodiče pro napájení snímačů a tři pro signální výstupy snímačů.
Nízkorychlostní motory s vnějším rotorem jsou vyrobeny s velkým počtem pólů (a tedy zubů) na fázi, aby se dosáhlo rotace s úhlovou frekvencí výrazně menší, než je frekvence řídicího proudu. Ale ani u vysokootáčkových třífázových motorů se počet zubů menší než 9 obvykle nepoužívá.