Princip činnosti a zařízení elektromotoru
Jakýkoli elektromotor je navržen tak, aby vykonával mechanickou práci kvůli spotřebě elektrické energie, která se na něj aplikuje, která se obvykle přeměňuje na rotační pohyb. Ačkoli v technologii existují modely, které okamžitě vytvářejí translační pohyb pracovního těla. Tyto motory se nazývají lineární motory.
V průmyslových instalacích pohánějí elektromotory různé obráběcí stroje a mechanická zařízení zapojené do technologického výrobního procesu.
Uvnitř domácích spotřebičů pohánějí elektromotory pračky, vysavače, počítače, vysoušeče vlasů, dětské hračky, hodiny a mnoho dalších zařízení.

Základní fyzikální procesy a princip působení
Při pohybu uvnitř magnetické pole elektrické náboje, které se nazývají elektrické proudy, mají vždy mechanickou sílu, která má tendenci vychylovat jejich směr v rovině kolmé na orientaci siločar magnetického pole.Když elektrický proud prochází kovovým drátem nebo cívkou z něj vyrobenou, má tato síla tendenci pohybovat/otáčet každým drátem s proudem a celou cívkou jako celkem.
Níže uvedená fotografie ukazuje kovový rám, kterým protéká proud. Magnetické pole aplikované na něj vytváří sílu F pro každou větev rámu, která vytváří rotační pohyb.

Tato vlastnost interakce elektrické a magnetické energie, založená na vytváření elektromotorické síly v uzavřené vodivé smyčce, je uvedena do provozu na každém elektromotoru. Jeho design zahrnuje:
-
cívka, kterou protéká elektrický proud. Je umístěn na speciálním kotevním jádru a upevněn v rotačních ložiskách pro snížení odolnosti vůči třecím silám. Tato konstrukce se nazývá rotor;
-
stator, který vytváří magnetické pole, které svými siločárami proniká elektrickými náboji procházejícími podél závitů vinutí rotoru;
-
pouzdro pro umístění statoru. Uvnitř těla jsou vyrobena speciální sedadla, uvnitř kterých jsou namontovány vnější klece ložisek rotoru.
Zjednodušenou konstrukci nejjednoduššího elektromotoru lze znázornit obrázkem následující formy.

Při otáčení rotoru vzniká točivý moment, jehož výkon závisí na obecné konstrukci zařízení, množství aplikované elektrické energie a jejích ztrátách při přeměnách.
Velikost maximálního možného točivého momentu motoru je vždy menší než elektrická energie na něj přiváděná. Vyznačuje se hodnotou účinnosti.
Typy elektromotorů
Podle typu proudu procházejícího cívkami se dělí na stejnosměrné nebo střídavé motory.Každá z těchto dvou skupin má velké množství úprav pomocí různých technologických postupů.
DC motory
Mají statorové magnetické pole vytvořené stacionárním pevným permanentní magnety nebo speciální elektromagnety s budicími cívkami. Cívka kotvy je pevně uložena v hřídeli, která je upevněna v ložiskách a může se volně otáčet kolem vlastní osy.
Základní struktura takového motoru je znázorněna na obrázku.

Na jádru kotvy z feromagnetických materiálů je cívka sestávající ze dvou sériově zapojených částí, které jsou na jednom konci spojeny s vodivými kolektorovými deskami a na druhém vzájemně propojeny. Dva grafitové kartáče jsou umístěny na diametrálně opačných koncích kotvy a jsou přitlačeny ke kontaktním podložkám kolektorových desek.
Kladný stejnosměrný potenciál zdroje je aplikován na spodní kartáč vzoru a záporný potenciál na horní. Směr proudu procházejícího cívkou je znázorněn přerušovanou červenou šipkou.
Proud způsobuje, že magnetické pole má severní pól vlevo dole od kotvy a jižní pól vpravo nahoře od kotvy (pravidlo kardanu). To má za následek odpuzování pólů rotoru od stejnojmenných stacionárních a přitahování k opačným pólům statoru. V důsledku působící síly dochází k rotačnímu pohybu, jehož směr je označen hnědou šipkou.
Při dalším otáčení kotvy setrvačností se póly přenášejí na další kolektorové desky. Směr proudu v nich je obrácený. Rotor se dále otáčí.
Jednoduchá konstrukce takového kolektorového zařízení vede k velkým ztrátám elektrické energie.Takové motory fungují v zařízeních jednoduché konstrukce nebo v hračkách pro děti.
Stejnosměrné elektromotory zapojené do výrobního procesu mají složitější konstrukci:
-
cívka není rozdělena na dvě, ale na několik částí;
-
každá sekce cívky je namontována na vlastním pólu;
-
kolektorové zařízení je vyrobeno s určitým počtem kontaktních podložek podle počtu vinutí.
Výsledkem je hladké připojení každého pólu přes jeho kontaktní desky ke kartáčům a zdroji proudu a jsou sníženy energetické ztráty.
Zařízení takové kotvy je zobrazeno na fotografii.
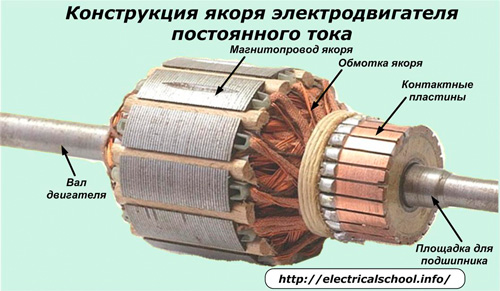
U stejnosměrných motorů lze směr otáčení rotoru obrátit. K tomu stačí změnit pohyb proudu v cívce na opačný změnou polarity u zdroje.
AC motory
Od předchozích konstrukcí se liší tím, že elektrický proud tekoucí v jejich cívce je popsán pomocí sinusový harmonický zákonperiodicky mění svůj směr (znak). K jejich napájení je přiváděno napětí z generátorů se střídavými znaky.
Stator takových motorů je prováděn magnetickým obvodem. Je vyroben z feromagnetických desek s drážkami, ve kterých jsou uloženy závity cívky s rámovou (cívkovou) konfigurací.

Synchronní elektromotory
Níže uvedená fotografie ukazuje princip činnosti jednofázového střídavého motoru se synchronním otáčením elektromagnetických polí rotoru a statoru.

V drážkách magnetického obvodu statoru na diametrálně opačných koncích jsou umístěny dráty vinutí, schematicky znázorněné ve formě rámu, kterým protéká střídavý proud.
Uvažujme případ časového okamžiku, který odpovídá průchodu kladné části jeho půlvlny.
V ložiskových článcích se volně otáčí rotor se zabudovaným permanentním magnetem, ve kterém jsou jasně definovány severní «N ústí» a jižní «S ústí» sloupu. Když statorovým vinutím protéká kladná půlvlna proudu, vzniká v něm magnetické pole s póly «S st» a «N st».
Mezi magnetickými poli rotoru a statoru vznikají interakční síly (odpuzující póly a na rozdíl od pólů se přitahující), které mají tendenci otáčet kotvu motoru z libovolné polohy do extrému, když jsou opačné póly umístěny co nejblíže k sobě. další.
Pokud uvažujeme stejný případ, ale v okamžiku, kdy drátem rámu prochází opačný - záporná půlvlna proudu, dojde k rotaci kotvy v opačném směru.
Pro zajištění plynulého pohybu rotoru ve statoru není vyroben jeden rám vinutí, ale jejich určitý počet, vzhledem k tomu, že každý z nich je napájen samostatným zdrojem proudu.
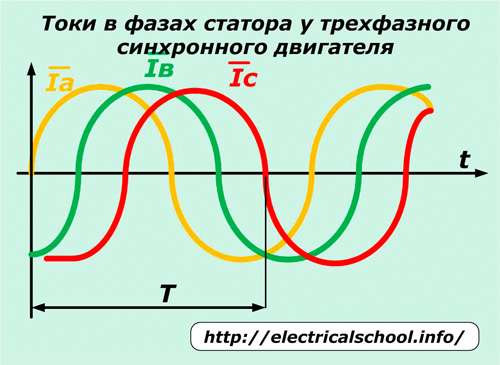
Princip činnosti třífázového střídavého motoru se synchronní rotací, elektromagnetická pole rotoru a statoru jsou znázorněna na následujícím obrázku.

V tomto provedení jsou uvnitř magnetického obvodu statoru namontovány tři cívky A, B a C, vzájemně posunuté o úhly 120 stupňů. Cívka A je označena žlutě, B je zelená a C je červená. Každá cívka je vyrobena se stejnými rámy jako v předchozím případě.
Na obrázku v každém případě protéká proud pouze jednou cívkou v dopředném nebo zpětném směru, což je označeno znaménky «+» a «-«.
Při průchodu kladné půlvlny fází A v propustném směru zaujme osa rotorového pole vodorovnou polohu, protože magnetické póly statoru jsou vytvořeny v této rovině a přitahují pohyblivou kotvu. Opačné póly rotoru mají tendenci se přibližovat k pólům statoru.
Když kladná půlvlna přejde do fáze C, kotva se otočí o 60 stupňů ve směru hodinových ručiček. Jakmile je proud přiveden do fáze B, dojde k podobné rotaci kotvy. Každý následující tok proudu v další fázi dalšího vinutí otočí rotor.
Pokud se na každé vinutí přivede třífázové síťové napětí posunuté o úhel 120 stupňů, pak v nich budou kolovat střídavé proudy, které roztáčí kotvu a vytvářejí její synchronní rotaci s přivedeným elektromagnetickým polem.
Stejné mechanické provedení je úspěšně použito u třífázového krokového motoru... Pouze v každém vinutí ovládáním speciální ovladač (ovladač krokového motoru) Konstantní impulsy jsou aplikovány a odstraněny podle výše popsaného algoritmu.
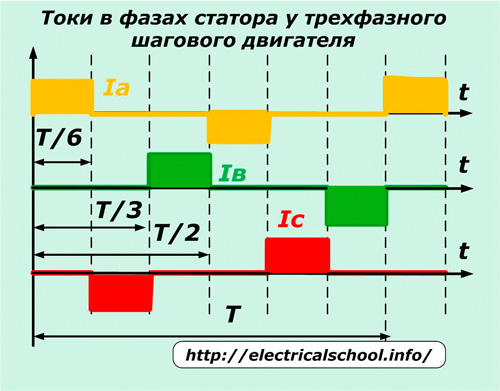
Jejich rozběhem se spustí rotační pohyb a jejich ukončení v určitém časovém okamžiku zajistí změřené otočení hřídele a zastavení v naprogramovaném úhlu k provedení určitých technologických operací.
U obou popsaných třífázových systémů je možné měnit směr otáčení kotvy. K tomu stačí změnit pořadí fází «A» — «B» — «C» na jinou, například «A» — «C» — «B».
Rychlost rotoru je regulována délkou periody T. Její snížení vede ke zrychlení rotace.Velikost amplitudy proudu ve fázi závisí na vnitřním odporu vinutí a hodnotě napětí na něj přivedeného. Určuje velikost točivého momentu a výkon elektromotoru.
Asynchronní motory
Tyto konstrukce motorů mají stejný magnetický obvod statoru s vinutím jako u dříve diskutovaných jednofázových a třífázových modelů. Svůj název získaly podle asynchronního otáčení elektromagnetických polí kotvy a statoru. Toho se dosáhne zlepšením konfigurace rotoru.
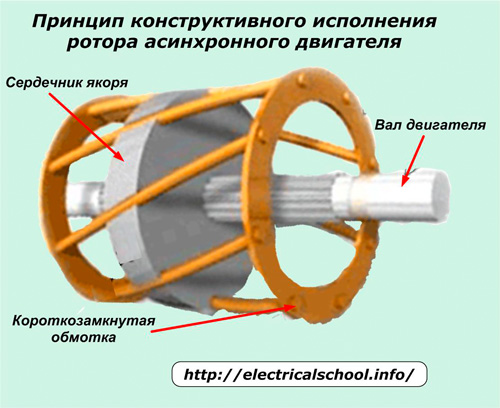
Jeho jádro je vyrobeno z drážkovaných elektroocelových plechů. Jsou vybaveny hliníkovými nebo měděnými proudovými vodiči, které jsou na koncích kotvy uzavřeny vodivými kroužky.
Při přivedení napětí na vinutí statoru se elektromotorickou silou indukuje elektrický proud ve vinutí rotoru a vzniká magnetické pole kotvy. Když se tato elektromagnetická pole vzájemně ovlivňují, hřídel motoru se začne otáčet.
U této konstrukce je pohyb rotoru možný až po vzniku točivého elektromagnetického pole ve statoru a pokračuje s ním v asynchronním režimu provozu.
Asynchronní motory mají jednodušší konstrukci, proto jsou levnější a jsou široce používány v průmyslových instalacích a domácích spotřebičích.

Elektromotor ABB odolný proti výbuchu
Lineární motory
Mnoho pracovních orgánů průmyslových mechanismů provádí vratný nebo translační pohyb v jedné rovině, který je nezbytný pro provoz kovoobráběcích strojů, vozidel, úderů kladiva při zarážení pilot ...
Přesouvání takového pracovního tělesa pomocí převodovek, kuličkových šroubů, řemenových pohonů a podobných mechanických zařízení z rotačního elektromotoru komplikuje konstrukci. Moderním technickým řešením tohoto problému je provoz lineárního elektromotoru.
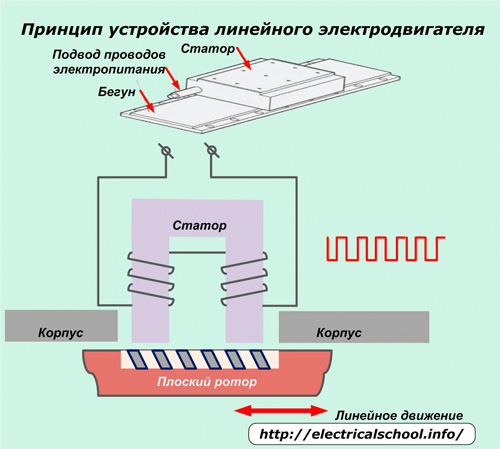
Jeho stator a rotor jsou podlouhlé ve formě pásů, spíše než navinuté do prstenců, jako u rotačních elektromotorů.
Princip činnosti spočívá v udělování vratného lineárního pohybu oběžnému rotoru v důsledku přenosu elektromagnetické energie ze stacionárního statoru s otevřeným magnetickým obvodem určité délky. Postupným zapínáním proudu v něm vzniká pracovní magnetické pole.
Na vinutí kotvy působí kolektorem. Síly vznikající v takovém motoru pohybují rotorem pouze v lineárním směru podél vodicích prvků.
Lineární motory jsou navrženy pro provoz na stejnosměrný nebo střídavý proud a mohou pracovat v synchronním nebo asynchronním režimu.
Nevýhody lineárních motorů jsou:
-
složitost technologie;
-
vysoká cena;
-
nízká energetická účinnost.