Reverzujte a zastavte indukční motor s kotvou nakrátko
Indukční motor je reverzibilní stroj. Pro změnu směru otáčení rotoru je nutné změnit směr otáčení magnetického pole (přepnutím napájecích vodičů na svorky dvou fází motoru) — Startování motoru a brzdové okruhy
Mechanické charakteristiky pro dva směry otáčení jsou uvedeny na Obr. 1.
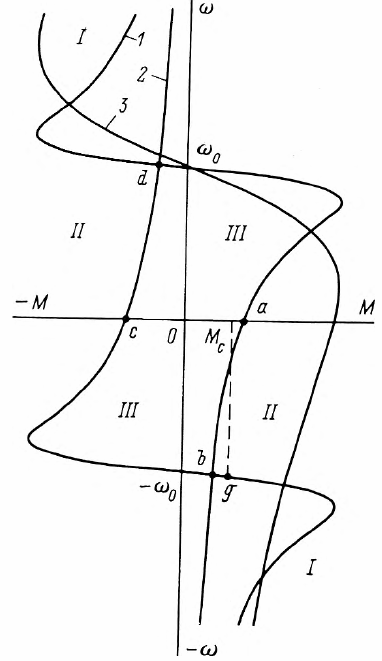
Rýže. 1. Skupina mechanických charakteristik indukčního motoru pro reverzibilní provoz v režimu zastavení s přívodem energie do sítě (I), opoziční režim (II) a motor (III) 1, 2 — přirozený; 3 — umělé.
Indukční motor s kotvou nakrátko může být použit nejen jako motor, ale také jako brzda. V režimu zastavení pracuje každý elektromotor vždy jako generátor. V tomto případě může mít indukční elektromotor s rotorem nakrátko tři režimy brzdění.
V režimu regenerativního brzdění stroj pracuje se záporným skluzem. V tomto případě rychlost rotoru převyšuje rychlost otáčení magnetického pole.Samozřejmě pro přepnutí do tohoto režimu musí být na stranu hřídele aplikován vnější aktivní moment.
Režim zpětné vazby je široce používán ve zvedacích zařízeních. Při sestupu může pohonný systém vlivem potenciální energie zátěže nabývat rychlosti překračující rychlost rotace magnetického pole a sestup proběhne v rovnovážném stavu odpovídajícím určitému bodu g na mechanické charakteristice. , kdy je statický moment vzniklý klesajícím zatížením vyvážen brzdným momentem motoru.
U konvenčních pohonů s reaktivním statickým momentem je příslušný režim realizován pouze pomocí speciálních řídicích obvodů, které umožňují snížit rychlost otáčení magnetického pole. Mechanické charakteristiky indukčního stroje pro režim zpětné vazby jsou znázorněny na stejném obrázku. 1.
Jak je znázorněno, maximální točivý moment v režimu generátoru je o něco vyšší než v režimu motoru a kritický skluz v absolutní hodnotě je stejný.
Asynchronní generátory jako takové mají velmi úzký rozsah, tzn větrné elektrárny... Protože síla větru není konstantní a v důsledku toho se rychlost otáčení zařízení výrazně mění, je za těchto podmínek výhodnější asynchronní generátor.
Nejpoužívanější je režim brzdění — opozice. Přechod do tohoto režimu asynchronních motorů, ale i stejnosměrných motorů je možný ve dvou případech (obr. 1): při výrazném zvýšení statického momentu (sekce ab) nebo při přepnutí statorového vinutí pro jiný směr otáčení ( sekce cd).
V obou případech motor pracuje se skluzem větším než 1, dokud proudy nepřekročí rozběhové proudy. Proto u motoru s kotvou nakrátko lze tento režim použít pouze k rychlému zastavení pohonu.
Při dosažení nulových otáček musí být motor odpojen od sítě, jinak bude mít tendenci zrychlovat v opačném směru.
Při brzdění motorem s protilehlým vinutím rotoru musí být do obvodu rotoru zaveden odpor reostatu, aby se omezil proud a zvýšil brzdný moment.
Je to také možné režim dynamického brzdění… To však přináší určité potíže. Po odpojení motoru od sítě zmizí i magnetické pole stroje. Asynchronní stroj je možné budit ze zdroje stejnosměrného proudu, který je připojen ke statoru odpojenému od sítě střídavého proudu. Zdroj by měl poskytovat proud ve vinutí statoru blízký nominální hodnotě. Protože tento proud je omezen pouze elektrickým odporem cívky, napětí stejnosměrného zdroje musí být nízké (typicky 10 – 12 V).
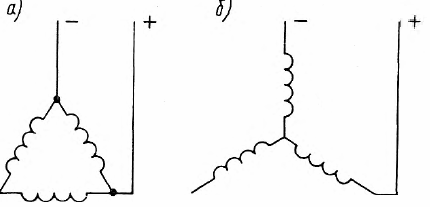
Rýže. 2. Připojení statoru indukčního motoru ke zdroji stejnosměrného proudu v režimu dynamického brzdění při zapojení do trojúhelníku (a) a hvězdy (b)
Samobuzení se používá i pro dynamické brzdění. Kondenzátory jsou připojeny ke statoru odpojenému od sítě.
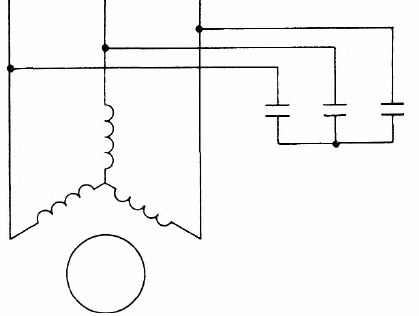
Rýže. 3. Schéma dynamického brzdění samobuzeného indukčního motoru
Jak se rotor otáčí, vzniká v obvodu statoru EMF v důsledku zbytkové magnetizace a toku proudu statorovými vinutími a také kondenzátory.Při dosažení určité rychlosti v obvodu statoru nastanou rezonanční podmínky: součet indukčních odporů se bude rovnat kapacitnímu odporu. Začne intenzivní proces samobuzení stroje, což povede ke zvýšení EMF. Režim samobuzení skončí, když se EMF stroje E a úbytek napětí na kondenzátorech vyrovnají.
Maximální brzdný moment se s rostoucí kapacitou posouvá do nižších rychlostí. Nevýhodou uvažovaného režimu brzdění je výskyt brzdného účinku pouze v určitém pásmu rychlosti a nutnost použití velkých kondenzátorů pro brzdění při nízkých rychlostech.
Pozitivní je, že není potřeba žádný další zdroj elektrické energie. Tento režim je vždy implementován v instalacích, kde je k motoru připojena kondenzátorová banka pro zlepšení účiníku napájecí sítě.
Viz také k tomuto tématu: Brzdové obvody pro asynchronní motory