Mechanické vlastnosti asynchronního motoru při různých režimech, napětích a frekvencích
 Mechanické charakteristiky indukčních motorů lze vyjádřit jako n = f (M) nebo n=e(I). Mechanické charakteristiky asynchronních motorů se však často vyjadřují ve formě závislosti M = f(S), kde C — posuvné, S = (nc-n) / nc, kde ns — synchronní otáčky.
Mechanické charakteristiky indukčních motorů lze vyjádřit jako n = f (M) nebo n=e(I). Mechanické charakteristiky asynchronních motorů se však často vyjadřují ve formě závislosti M = f(S), kde C — posuvné, S = (nc-n) / nc, kde ns — synchronní otáčky.
V praxi se pro grafickou konstrukci mechanických charakteristik používá zjednodušený vzorec nazývaný Klossův vzorec:

zde: Mk — kritická (maximální) hodnota točivého momentu. Tato hodnota momentu odpovídá kritickému skluzu

kde λm = Mk / Mn
Klossův vzorec se používá k řešení problémů souvisejících s elektrickým pohonem prováděným pomocí indukčního motoru. Pomocí Klossova vzorce můžete sestavit graf mechanických charakteristik podle pasových údajů indukčního motoru. Pro praktické výpočty by mělo být ve vzorci při určování kritického momentu před kořenem uvažováno pouze znaménko plus.
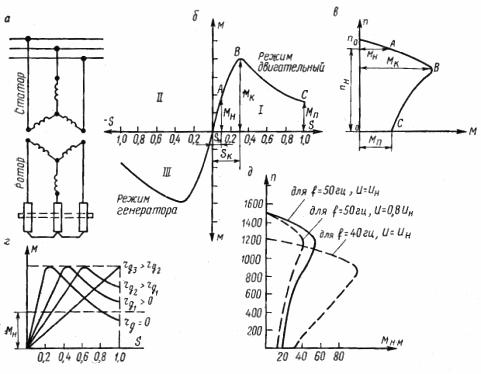
Rýže. 1.Asynchronní motor: a — schéma, b — mechanická charakteristika M = f (S) — přirozená v režimu motoru a generátoru, c — přirozená mechanická charakteristika n = f (M) v režimu motoru, d — mechanické vlastnosti umělého reostatu, e — mechanické vlastnosti pro různá napětí a frekvence.

Indukční motor s veverkou klecí
Jak je patrné z Obr. 1, mechanické charakteristiky indukčního motoru umístěného v I a III kvadrantu. Část křivky v I kvadrantu odpovídá kladné hodnotě skluzu a charakterizuje provozní režim asynchronního motoru a v III kvadrantu režim generátoru. Největší praktický zájem má režim motoru.
Graf mechanických charakteristik režimu motoru obsahuje tři charakteristické body: A, B, C a může být podmíněně rozdělen do dvou částí: OB a BC (obr. 1, c).
Bod A odpovídá jmenovitému momentu motoru a je určen vzorcem Mn = 9,55•103•(Strn /nn)
Tento okamžik tomu odpovídá jmenovitý skluz, která má pro motory s obecným průmyslovým použitím hodnotu v rozmezí od 1 do 7 %, tedy Sn = 1 — 7 %. Přitom malé motory mají větší prokluz a velké méně.
Motory s vysokým skluzem určené pro rázové zatížení mají Сn~15%. Patří mezi ně například jednořadé střídavé motory.
Bod C charakteristiky odpovídá počáteční hodnotě točivého momentu na hřídeli motoru při rozběhu. Tento moment Mp se nazývá počáteční nebo počáteční. V tomto případě je skluz roven jednotce a rychlost je nulová. Startovací moment lze snadno určit z údajů referenční tabulky, která ukazuje poměr rozběhového momentu ke jmenovitému Mp / Mn.
Velikost rozběhového momentu při konstantních hodnotách frekvence napětí a proudu závisí na aktivním odporu v obvodu rotoru. V tomto případě zpočátku s rostoucím aktivním odporem roste hodnota rozběhového momentu a dosahuje svého maxima, když se aktivní odpor obvodu rotoru rovná celkovému indukčnímu odporu motoru. Následně s rostoucím aktivním odporem rotoru klesá hodnota počátečního krouticího momentu, který má v limitu tendenci k nule.
Bod C (obr. 1, b a c) odpovídá maximálnímu momentu, který může motor vyvinout v celém rozsahu otáček od n = 0 do n = ns... Tento moment se nazývá kritický (neboli přetočivý) moment Mk. . Kritický moment také odpovídá kritickému skluzu Sk. Čím menší je hodnota kritického skluzu Sk, tak i hodnota jmenovitého skluzu Сn, tím větší je tuhost mechanických charakteristik.
Počáteční a kritické momenty jsou určeny jmenovitými. Podle GOST pro elektrické stroje s motorem nakrátko musí být splněna podmínka Mn / Mn = 0,9 — 1,2, Mk / Mn = 1,65 — 2,5.
Je třeba poznamenat, že hodnota kritického momentu nezávisí na činném odporu obvodu rotoru, přičemž kritický skluz Сk je přímo úměrný tomuto odporu.To znamená, že s nárůstem aktivního odporu obvodu rotoru zůstává hodnota kritického momentu nezměněna, ale maximum křivky momentu se posouvá k rostoucím hodnotám skluzu (obr. 1, d).
Velikost kritického momentu je přímo úměrná druhé mocnině napětí aplikovaného na stator a nepřímo úměrná druhé mocnině frekvence napětí a frekvence proudu ve statoru.
Pokud se například napětí dodávané do motoru rovná 85 % jmenovité hodnoty, pak velikost kritického momentu bude 0,852 = 0,7225 = 72,25 % kritického momentu při jmenovitém napětí.
Při změně frekvence je pozorován opak. Pokud je například u motoru navrženého pro provoz s proudovou frekvencí = 60 Hz napájecí proud s frekvencí = 50 Hz, pak kritický moment nastane při (60/50)2 = 1,44 krát větší než oficiální hodnota jeho frekvence (obr. 1, e).
Kritický moment charakterizuje okamžitou přetížitelnost motoru, to znamená, že ukazuje, jaký okamžik (během několika sekund) přetížení je motor schopen vydržet bez škodlivých následků.

Úsek mechanické charakteristiky od nuly do maximální (kritické) hodnoty (viz obr. 1, biv) se nazývá stabilní částí charakteristiky a úsek BC (obr. 1, c) - nestabilní část.
Toto rozdělení se vysvětluje tím, že na rostoucí části charakteristik OF s rostoucím skluzem, tzn. s klesajícími otáčkami roste točivý moment vyvíjený motorem.To znamená, že se zvyšujícím se zatížením, tj. se zvyšujícím se brzdným momentem, se rychlost otáčení motoru snižuje a krouticí moment se zvyšuje. Při poklesu zátěže naopak otáčky rostou a kroutící moment klesá. Jak se zatížení mění v celém rozsahu stabilní části charakteristiky, mění se otáčky a moment motoru.
Motor nemůže vyvinout více, než je kritický moment, a pokud je brzdný moment větší, motor se musí nevyhnutelně zastavit. Jak se říká, dojde k převrácení motoru.
Mechanická charakteristika při konstantních U a I a nepřítomnost přídavného odporu v obvodu rotoru se nazývá přirozená charakteristika (charakteristika indukčního motoru s kotvou nakrátko s vinutým rotorem bez přídavného odporu v obvodu rotoru). Umělé nebo reostatické charakteristiky se nazývají ty, které odpovídají dodatečnému odporu v obvodu rotoru.
Všechny hodnoty rozběhového momentu jsou různé a závisí na aktivním odporu obvodu rotoru. Stejnému jmenovitému momentu Mn odpovídají jezdce různých velikostí. S rostoucím odporem obvodu rotoru se zvyšuje skluz a tudíž se snižují otáčky motoru.
V důsledku zařazení aktivního odporu do obvodu rotoru se mechanická charakteristika ve stabilní části natahuje ve směru rostoucího skluzu, úměrně odporu.To znamená, že otáčky motoru se začínají výrazně měnit v závislosti na zatížení hřídele a tvrdá charakteristika se stává měkkou.