Elektrický pohon vozíku s mostovými jeřáby
Vozík s mostovým jeřábem je samostatným prvkem zdvihacího zařízení a je určen k přemisťování břemen v dosahu mostového jeřábu s technologicky stanovenou rychlostí pohybu a potřebnou přesností polohování břemene. Pohon podvozku je jednou z hlavních součástí vybavení mostových jeřábů.
Vozík se pohybuje po dráze mostového jeřábu. Samotný most se pohybuje ve směru kolmém na směr pohybu vozíku. Na vozíku je instalován zvedací mechanismus, který je vybaven hákem (nebo elektromagnetem), pomocí kterého můžete pohybovat nákladem. Pohyb podvozku je nedílnou součástí technologického cyklu mostového jeřábu (obr. 1).
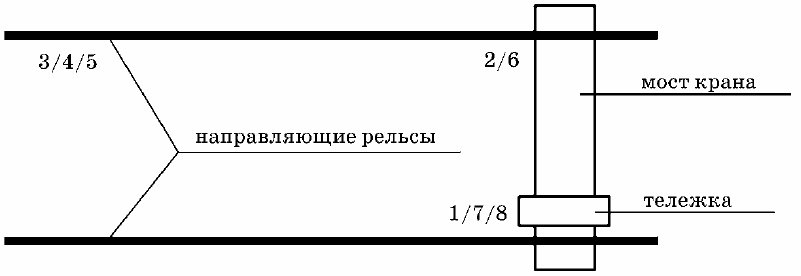
Rýže. 1. Schéma provádění operací mostovým jeřábem v pracovním cyklu
Tento cyklus se skládá z následujících operací (na obrázku 1 jsou čísla operací uvedena v číslech):
1 — zvedání nákladu;
2 — přesunutí vozíku do dané polohy;
3 — přemístění jeřábu do předem určené polohy;
4 — snížení hmotnosti břemene;
5 — zvedání háku hmotností břemene;
6 — přesunutí jeřábu do původní polohy;
7 — přesunutí vozíku do původní polohy;
8 — spouštění háku.
Jak je patrné z procesního cyklu mostového jeřábu, motor pohonu troleje se zapne ve druhé a sedmé operaci. Když se podvozek přiblíží k dané poloze ve vzdálenosti mostového jeřábu, elektromotor pohonu podvozku se elektricky zabrzdí, aby byla zajištěna požadovaná přesnost brzdění.
Poté se motor vypne a použije se mechanická brzda. Navíc se zapne elektrický pohon pohybu mostu a náklad se pohybuje po dílně podle technologického úkolu. Při dojezdu na určené místo se jeřáb zastaví, břemeno se spustí a následně se provedou potřebné technologické operace.

Kinematické schéma mechanismu pohybu vozíku s mostovými jeřáby je na obrázku 2. Mechanismus pohybu vozíku je vyroben podle schématu s převodovkou uprostřed mezi hnacími koly.
Pohon od elektromotoru D přes brzdový kotouč T, převodovku P, spojky M a hřídele B je přenášen na pojezdová kola. K udržení vozíku v klidu se používá brzdová kladka.
Vozík má čtyři pojezdová kola a dvě hnací kola. Pojezdová kola jeřábových vozíků jsou obvykle vyrobena se dvěma žebry.
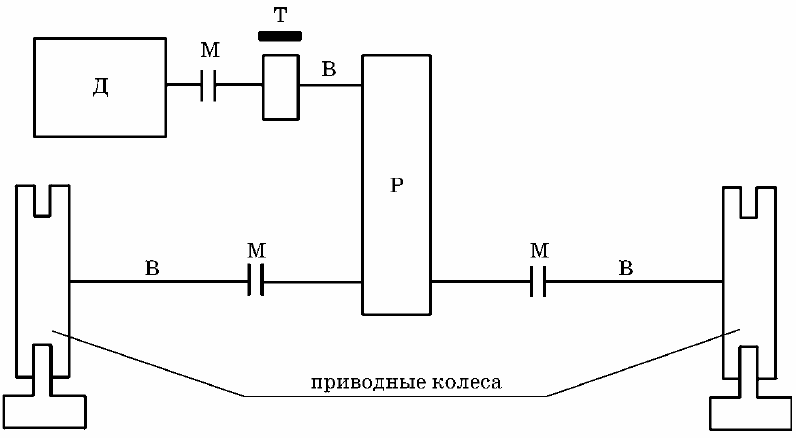
Rýže. 2. Kinematické schéma mechanismu pohybu vozíku
Čas pro přesun vozíku do zadané polohy bude určen s přihlédnutím k době zrychlení a zpomalení vozíku s požadovaným zrychlením.Na základě podmínek technologického procesu by měl mít tachogram při pohybu vozíku podobu znázorněnou na obrázku 3.
Je nutné zajistit plynulý rozjezd podvozkového mechanismu na danou rychlost s požadovaným zrychlením. Pro zajištění potřebné přesnosti polohování je zapotřebí plynulé zpomalení elektropohonu s přechodem na sníženou rychlost, po kterém se vozík zastaví.
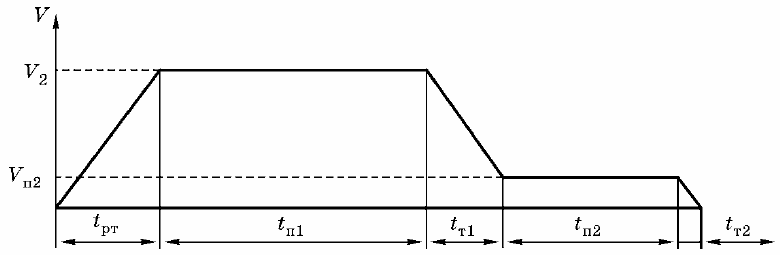
Rýže. 3. Tachogram mechanismu pohybu vozíku
Pohyb podvozku s nárazy na kovovou konstrukci ve spojích kolejnic, intenzivní zrychlení a zpomalení, přirozené vibrace kovové konstrukce při zatížení strojů způsobují velmi intenzivní mechanické nárazy na elektrické zařízení umístěné na podvozku mostového jeřábu. Na základě toho musí elektrický pohon pro pohyb vozíku splňovat následující požadavky:
1) elektrický pohon musí poskytovat schopnost uvést mechanismus do pohybu, obrátit směr pohybu a zastavit mechanismus s požadovaným zrychlením (m / s2) a správnou přesností polohování (mm);
2) elektrický pohon musí zajišťovat plynulou regulaci rychlosti dolů z hlavní;
3) vyvinutý točivý moment motoru musí zajistit činnost mechanismu při dané intenzitě;
4) při daném počtu startů motoru za hodinu by nemělo docházet k přehřívání jeho vinutí, díky čemuž je možné dlouhodobé zastavení mechanismu;
5) motor musí být zvolen v souladu s provozními podmínkami, to znamená, že musí mít vhodnou konstrukci a jeho vinutí musí být tepelně odolné a musí mít izolaci proti vlhkosti;
6) hnací motor musí mít nejmenší setrvačníkové hmoty, které mají významný vliv na tok přechodových jevů při častých startech pohonu;
7) hnací motor musí odpovídat výkonu pojezdového mechanismu a mít potřebnou přetížitelnost;
8) elektrický pohon musí zajistit vznik přechodných procesů s minimální dobou trvání;
9) při návrhu elektrického pohonu je třeba zohlednit bezpečnost a snadnou údržbu.

Statický moment pro pohybové mechanismy pracující na vodorovné kolejové lince ve výrobním zařízení vzniká kluznými třecími silami v ložiskách a valivým třením podvozkových kol odvalujících se po kolejnicích mostového jeřábu. Statický moment mechanismu při dopředném pohybu vozíku je dán nosností jeřábu. Statický moment mechanismu při zpětném pohybu podvozku je vypočítán pro neúplné zatížení.
Pro elektrický pohon vozíku mostových jeřábů, asynchronní motory s kotvou nakrátko (vč. jako součást frekvenčního měniče), indukční motory s vinutým rotorem a nezávisle buzené stejnosměrné motory.