Elektrická zařízení pro pily
 Na pilách je hlavním zařízením pro řezání kulatiny na desky, trámy a další sortimenty pily.
Na pilách je hlavním zařízením pro řezání kulatiny na desky, trámy a další sortimenty pily.
Rám pily je vícepilový stroj s pilami nataženými v tuhém rámu. Vertikální pily jsou vyráběny v jednopodlažních a dvoupodlažních, úzkých a širokých otvorech, s joggingem a kontinuálním posuvem. Nejnovější rámy pil mají tři až šest elektromotorů. Rychlost otáčení klikového hřídele — od 200 do 600 min–1, pohon je prováděn asynchronním motorem s vinutým rotorem, někdy motorem s rotorem nakrátko.
Na rámu pily (obr. 1) jsou v čelním řezu řezány kmeny o délce 3,2–9 m a průměru 65 cm. Litinový rám rámu se skládá ze dvou nohou a bočních stěn navzájem spojených příčnými spoji.
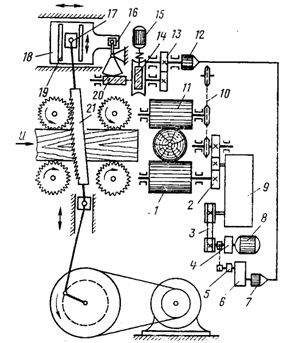
Rýže. 1. Kinematické schéma rámu pily
Rám pily je namontován na základové desce. Klikový hřídel se dvěma setrvačníky a hnací řemenicí se otáčí ve dvou hlavních ložiskách uložených na desce.Ojnice I nosníku je spojena se spodní hlavou s čepem klikového hřídele přes válečkové ložisko a horní hlava je s čepem spojena přes spodní příčník rámu pily přes jehlové ložisko.
Spodní a horní příčníky rámu pily jsou spojeny kruhovými trubkovými podpěrami. Textolitové jezdce s čepy na příčných nosnících rámu pily jsou spojeny kuželíkovými ložisky.
Konstrukce rámu pily umožňuje použití hydraulického napínáku. Z jeho osmi vodítek jsou čtyři prizmatická a čtyři plochá, která jsou ve dvojicích připevněna k litinovým deskám namontovaným na lůžku. Horní vodicí desky jsou uloženy na saních a jsou posouvány naklápěcím mechanismem rámu pily v závislosti na velikosti pozemku Δ.
Individuální pohon čtyřválcového podávacího mechanismu, tvořený tyristorovým pohonem, zajišťuje plynulé nastavení rychlosti podávání kmene. Točivý moment je přenášen na spodní válečky 1 od motoru 8 přes elektromagnet, elektromagnetickou spojku 4, řemenový převod 3, převodovku 9 a ozubená kola 2. Horní válečky 11 se otáčí válečkovým řetězem 10.
Velikost balíků se nastavuje změnou šoupátka elektromagnetické spojky 4, která se provádí otáčením kotouče odstředivého regulátoru 5. Za tímto účelem obsluha zapne servomotor 15, otočením kotouče do příslušného úhlu, otáčení je prováděno šnekovým kolem 14, ozubenými koly 13, snímačem 12 selsyn, přijímačem 7 selsyn a reduktorem 6.Současnou změnou prostoru A prostřednictvím šnekového převodu 20 a páky 16 se deska 18 pohybuje ve vodorovné rovině s vedeními 19 horního saně 17 rámu pily a mění se sklon pily 21.
Schematické schéma zapojení rámu pily 2P80 je znázorněno na Obr. 2. Jeho elektrické vybavení tvoří asynchronní motor M1 pro pohon hlavního hřídele o výkonu 125 kW, motor pohonu naklápěcího mechanismu pily M2, motor hydraulické stanice MZ, motor mazacího čerpadla M4 a automatický řídicí systém, založený na tyristorovém pohonu se stejnosměrným motorem M5.
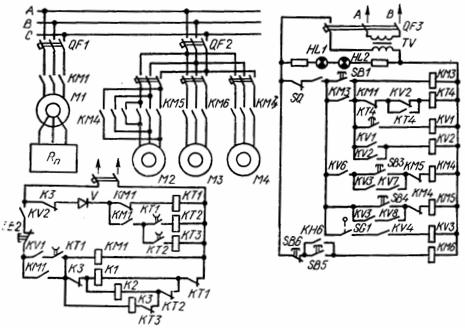
Rýže. 2. Elektrické schéma rámu pily 2P80
Maximální proudovou ochranu motorů zajišťují automatické spínače: QF1 — motor M1, QF2 — motory M2, MZ, M4 a QF3 — řídicí obvody Při zapnutí QF3 se rozsvítí výstražné kontrolky HL1 a HL2. Motor hlavního hřídele M1 se spouští pomocí lineárního stykače KM1 a hnací motor motoru posuvu M5 se spouští pomocí stykače KM2.
Elektrický řídicí obvod zahrnuje: silové obvody (hnací motory); relé-stykačové řídicí obvody a obvody automatického řídicího systému na bázi tyristorového stejnosměrného pohonu. Pro zapnutí startu pohonu rámu pily při otevřené horní bráně se odstraní hlavní hřídel a bezpečnostní pásy klínového řemene a při zastavení rámu pily se použijí koncové spínače (jejichž blok je naznačen na obr. 2). s písmeny SQ).
Spouštění motoru M1 s navinutým rotorem se provádí v závislosti na čase sekvenčním sepnutím akceleračních relé KT1, KT2 a KT3, která s daným časovým zpožděním postupně vydávají pomocí stykačů K1, K2 tři stupně spouštěcího reostatu Rp. a K3.
Stisknutím spouštěcího tlačítka SB1 (viz obr. 2) sepne cívka stykače KM3, čímž se sepnou výkonové kontakty KM3 motoru M4 olejového čerpadla, zapínací kontakt KM3 obchází tlačítko SB1.
Hlavní pohybový motor M1 se spustí, když sepne kontakt KV1 mezirelé KV1. Cívka tohoto relé je napájena přes kontakt KT4 časového relé KT4, které při sepnutí sepne se zpožděním. Proto relé KT4 poskytuje zpoždění mezi startem motoru M4 a M1.
Při sepnutí relé KV1 se současně zapne relé KV2, jehož zapínací kontakt KV2 nabudí cívku stykače KM1. Cívka KM1 po přijetí napájení sepne hlavní kontakty KM1 silového obvodu motoru M1 a rotor motoru se začne otáčet, když je startovací reostat plně nastaven. Poté, co zrychlovací stykače K1, K2 a K3 pracují s decelerací, rotor motoru se bude otáčet maximální rychlostí.
Po dokončení rozběhu motoru M1 rozpínací kontakt K3 současně přeruší napájecí obvod stykačů K1 a K2 a kontakt K3 v obvodu spouštěče motoru podavače M5 sepne a připraví jej ke spuštění. Motor se zastaví stisknutím tlačítka SB2.
Hydraulický systém zajišťuje zvedání a spouštění předních a zadních dveří, na jejichž svařených pláštích jsou upevněny horní podávací válečky.Brány jsou zvednuty do horní polohy hydraulickými válci poháněnými hydraulickou stanicí. Pohon hydraulické stanice zajišťuje motor M3, který se spouští stisknutím tlačítka, přičemž je buzena cívka KM6 spouštěče, která sepne hlavní kontakty KM6.
Sklon rámu pily lze ovládat ručně (stisknutím tlačítek SB3 a SB4) nebo automaticky. S automatickým ovládáním vinutí KM4 spouštěče KM4 ("více") a KM5 spouštěče KM5 ("méně") dostávají energii přes relé KV3, které se zapne, když je přepínač režimu v poloze "Automaticky" , tedy když je kontakt SQ1 sepnutý.
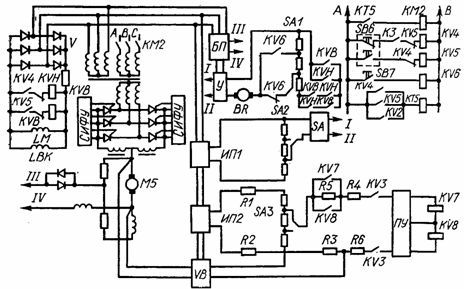
Tyristorový zdroj se skládá ze stejnosměrného motoru M5 a tyristorového měniče. Tyristorový měnič (obr. 9.2, c) je zapínán spouštěčem KM2 přes kontakt KV3, jehož cívka je napájena, když je kontakt časového relé KT5, který je v jeho obvodu, sepnut. Časové relé KT5 bude sepnuto, když budou cívky KV4 (pohyb vpřed) nebo KV5 (pohyb vzad) pod napětím.
Pokud se poleno při řezání zasekne, stáhne se zpětným chodem motoru. Spuštění motoru podavače není možné bez běžícího motoru M1. To je zajištěno zařazením kontaktu K3 do napájecího obvodu KV4, který sepne po ukončení spouštění motoru M1. Když je startér KM2 zapnutý, měnič a budicí vinutí LM motoru jsou pod napětím.
Pokud je registr zaseknutý, stisknutím tlačítka SB6 se relé KV4 a KVB vypnou a relé KV5 a KVH sepnou.V tomto případě relé KVH sepne své kontakty v napájecím obvodu zesilovače U, který je součástí tyristorového měniče, v důsledku toho se změní polarita napětí na výstupu měniče a motor změní směr otáčení.

Stabilita otáček při změně zátěže je zajištěna negativní zpětnou vazbou, která je realizována tachogenerátorem BR s budicí cívkou LBL. Kotva BR je připojena na vstup zesilovače V. Přechodový děj je vynucen využitím rekuperačního brzdění v obvodu tyristorového měniče.
Rychlost posuvu se nastavuje ručně a automaticky. K tomu je nastaven přepínač SA. Při ruční regulaci rychlosti posuvu je regulátor rychlosti připojen k zesilovači U přes obvody I a II. Regulátory otáček SA1 — SA3 jsou přepínače do panelů, ke kterým jsou připojeny odpory MLT.
Pohybem pohyblivého kontaktu SA1 se mění řídicí signál, který vstupuje do pulzně fázového řídicího systému (SPPC) přes PU zesilovač, čímž se mění úhel náběhu tyristorů propojených můstkovým usměrňovacím obvodem, čímž se mění otáčky motoru M5.
Pro automatické nastavení rychlosti motoru M5 pomocí spínače SA je SA1 odpojen od bloku zesilovače Y a připojen k zesilovači Y SA2 – snímač průměru čepu. V tomto případě začne SA1 přijímat napájení z SA2, což je potenciometr připojený ke stabilizačnímu zdroji IP1 a otáčený spínacím mechanismem výkonu.
Při změně průměru čepu se pohybuje jezdec potenciometru SA2 a mění se hodnota ovládacího napětí přivedeného na SA1, proto se se změnou průměru čepu mění i rychlost posuvu. Hodnota rychlosti by měla odpovídat sklonu rámu pily, rychlost se ovládá přepínáním SA3.
Snímač náklonu rámu pily SA3 je připojen ke stabilizovanému zdroji IP2 přes odpory R1 a R2. Výsledkem je napětí úměrné úhlu sklonu rámu pily. Toto napětí se porovnává s napětím motoru M5, úměrným otáčkám, odebraným z kotvy motoru a přivedeném na odpor R3 přes usměrňovací blok VB, je odečteno od výstupního napětí snímače náklonu rámu pily.
Při obráceném chodu motoru si blok VB udržuje konstantní referenční polaritu. Signál nesouladu je přiveden na vstup mezizesilovače PU přes odpory R4 — R6 a uzavírací kontakty KV3 (sepnuté při automatickém nastavení). Signál je zesílen a přiveden na výstup PU, na který jsou připojena relé KV7 a KV8. Jsou spouštěny v závislosti na polaritě chybového vstupního signálu.
Takže jak se rychlost posuvu zvyšuje, napětí odebírané z motoru se zvyšuje a hodnota nesouladu je záporná. V tomto případě je narušen vztah mezi rychlostí posuvu a sklonem rámu pily. Zesílený výstupní signál z PU zesilovače obsahuje relé KV7, mezi jehož uzavírací kontakty patří cívka KM4.
Uzavírací kontakty KM4 otáčejí motor M2 „vpřed“ – zvyšují sklon rámu pily.Současně se posunováním jezdce potenciometru zvyšuje výstupní napětí na SA3. Signál odchylky začne klesat k nule, načež se nárůst sklonu rámu pily zastaví. Tím je zachována shoda mezi rychlostí posuvu a úhlem rámu pily.
Regulační proces probíhá obdobně s poklesem rychlosti posuvu, ale chybový signál má v tomto případě kladné znaménko. To způsobí, že relé KV8 sepne, stejně jako KM5 a motor M2 se obrátí. S klesající rychlostí posuvu klesá i sklon rámu pily. Při regulaci kontakty pohonu KV7 a KV8 obcházejí odpor R5, což umožňuje vynutit proces.
Na začátku řezání je nutné mít řeznou rychlost rovnou maximálně 30% rychlosti pracovního posuvu. To se provádí následujícím způsobem. Stisknutím tlačítka SB7 se sepne relé KV6, jehož kontakty se přepnou na výstup SA1, takže přes zapínací kontakt KV6 je na vstup tyristorového měniče přivedeno malé ovládací napětí, které vytváří nízkou řeznou rychlost. .
Po ukončení posuvu se tlačítko SB7 vypne a zařízení přejde do pracovního režimu Přerušení automatického řídicího systému pro naklápění rámu pily při posuvu je zajištěno připojením uzavíracího kontaktu KV6 na napájecí obvod. startovacích cívek KM4 a KM5.