Uzavřené automatické řídicí systémy
 Uzavřené automatické řídicí systémy (ACS) se od otevřených obvodů liší použitým vybavením a úplností automatizace. Při otevřeném ACS nedostává hlavní jednotka (včetně řídicího zařízení) informace o aktuálním provozním režimu elektroinstalace (pohonný motor, běžící stroj).
Uzavřené automatické řídicí systémy (ACS) se od otevřených obvodů liší použitým vybavením a úplností automatizace. Při otevřeném ACS nedostává hlavní jednotka (včetně řídicího zařízení) informace o aktuálním provozním režimu elektroinstalace (pohonný motor, běžící stroj).
V uzavřeném ASUB jsou informace přenášeny do řídicích prvků, což je doprovázeno odesláním příslušných příkazových signálů. Obvod, který přenáší takové informace, uzavírá regulační smyčku a tvoří uzavřený ACS nebo zpětnovazební ACS.
Rozdíl mezi uzavřeným a otevřeným ACS lze vysvětlit na příkladu řízení rychlosti elektromotoru v systému generátor-motor (G-D). Při otevřeném ACS (obr. 1, a) se nastavené otáčky elektromotoru nastavují ručně potenciometrem P. Nastavení otáček se provádí vizuálně tachometrem, který je napájen tachogenerátorem TG. Jakákoli odchylka rychlosti od požadované hodnoty je operátorem eliminována působením na jezdec potenciometru.
V uzavřeném ACS (obr.1, b) kotva tachogenerátoru TG je zařazena do budícího obvodu generátoru OVG, čímž vzniká uzavřený nebo zpětnovazební systém (v tomto případě s otáčkovou zpětnou vazbou).
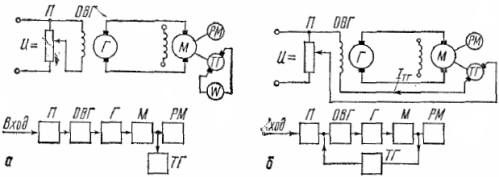
Rýže. 1. Ovládací obvod elektromotoru v systému G -M: a — otevřený ACS, b — uzavřený ACS
Proud generovaný tachogenerátorem (Aztg) v uzavřeném obvodu směrovaný na proud potenciometru (Azn) a výsledný proud působí v obvodu rovnajícím se geometrickému rozdílu těchto proudů. Pomocí posuvníku potenciometru obsluha nastaví hodnotu výsledného proudu v budicí cívce OVG, při které jsou zajištěny odpovídající otáčky elektromotoru. Zde role operátora končí. V budoucnu systém automaticky udržuje nastavený režim provozu elektrického pohonu s určitou přesností.
Předpokládejme, že v důsledku špičky zatížení poklesly otáčky elektromotoru oproti zadané. Snížení otáček je doprovázeno odpovídajícím snížením otáček tachogenerátoru a napětí na jeho svorkách. To zase povede ke snížení proudu Aztg ve zpětnovazebním obvodu a v určité poloze jezdce potenciometru - zvýšení výsledného proudu v budícím vinutí generátoru. Napětí generátoru a otáčky motoru se odpovídajícím způsobem zvýší.
Proces zvyšování rychlosti a napětí bude pokračovat, dokud proud ve zpětné vazbě nedosáhne nastavené hodnoty a otáčky motoru nedosáhnou nastavené hodnoty.
Při analýze systémů automatického řízení funkční grafy… Na Obr.2 přenosové funkční schéma ACS, které zahrnuje následující prvky:
1 — hlavní zařízení, které nastavuje režim provozu, dává příkaz, startovací impuls nebo signál,
2 — prvek srovnání. Zahrnuje signál X1 od mastera, signál X0, který určuje rychlost nebo úroveň řízené veličiny. S přihlédnutím k signálu z devátého hlavního zpětnovazebního prvku prvek 2 porovnává přijaté signály a odešle dodatečně opravený signál X2,
3 — transformační prvek, signál op jej transformuje do jiné formy, vhodnější pro další přenos. Například signál X2 je dodáván ve formě hydraulického (pneumatického, mechanického) tlaku, prvek 3 jej převádí na elektrický proud. Protože tento druh transformace může vyžadovat další energii, je prvek 3 připojen ke zdroji energie PE,
4 — přidání prvku, přijímá dva signály: X3 a X8 z korekčního prvku (paměťového prvku) 8. Tyto signály jsou sečteny prvkem 4 a odeslány dalšímu prvku,
5 — zesilovací prvek, vstupní signál X1 může být slabý a pro následný přenos musí být zesílen. To se provádí prostřednictvím prvku 5, který je připojen ke zdroji PE,
6 — výkonný prvek, vykonává přijímaný signál (elektromotor, elektromagnetické relé, servomotor),
7 — nastavitelný předmět nebo pracovní stroj.
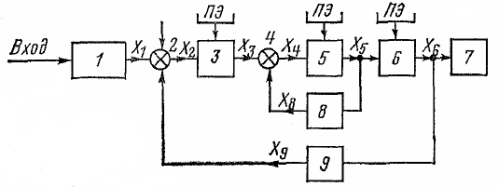
Rýže. 2. Funkční schéma ACS
Každý automatizační prvek je měnič energie, na jehož vstupu je přivedena hodnota X' a hodnota X je odstraněna z výstupu. «Pro každý prvek ve stacionárním stavu existuje určitá závislost X» (X'), nazývaná statická charakteristika.
Uzavřený automatický řídicí systém se vyznačuje přítomností zpětné vazby; má alespoň jednu zpětnovazební smyčku spojující výstup systému s jeho vstupem. Navíc může existovat tzv. vnitřní zpětná vazba, propojující výstup a vstup jednotlivých prvků ACS.
Zpětná vazba se dělí na tvrdou a flexibilní. Pevná omezení fungují v přechodných i stacionárních režimech provozu systému, flexibilní — pouze v přechodných. Rozlišujte mezi pozitivní a negativní zpětnou vazbou. Jak se regulovaná hodnota zvyšuje, kladné zapojení ji ještě zvyšuje a záporné naopak klesá. Zpětné vazby mohou přenášet signály úměrné úhlu natočení, rychlosti, napětí, proudu atd. a podle toho se nazývají zpětné vazby úhlu, rychlosti, napětí a proudu. Další podrobnosti naleznete zde: Prvky automatizačních systémů
Podle principu činnosti lze ACS rozdělit do tří skupin:
-
nepřetržitý provoz, ve kterém není narušen vztah mezi řízenou a nastavenou hodnotou,
-
impulsní akce, při které v pravidelných intervalech probíhá spojení mezi řízenou a nastavenou hodnotou,
-
reléová akce, kdy ke komunikaci dochází pouze tehdy, když hodnota dosáhne určité hodnoty.
V závislosti na zákonu, podle kterého se daná hodnota v čase mění, lze ACS také rozdělit do tří skupin:
-
systémy s konstantní nebo nízkou žádanou hodnotou, ve kterých je automaticky řízená hodnota udržována konstantní. Jedná se o stabilizační systémy, což jsou v podstatě automatické řídicí systémy (ACS),
-
systémy, ve kterých se cílová hodnota mění podle konkrétního, předem stanoveného programu. Jedná se o systém správy softwaru,
-
systémy, ve kterých se daná hodnota může široce měnit a podle libovolného zákona, tzn. sledovací systémy.