Způsoby brzdění elektromotorů
 Elektromotory v elektropohonu mohou rychle zastavit výrobní mechanismus nebo udržet určitou rychlost v kladném okamžiku pracovního stroje. V takovém případě se motor stává generátorem a pracuje v jednom z brzdných režimů: opačný, dynamický, restorativní (viz obr. 1) v závislosti na způsobu buzení.
Elektromotory v elektropohonu mohou rychle zastavit výrobní mechanismus nebo udržet určitou rychlost v kladném okamžiku pracovního stroje. V takovém případě se motor stává generátorem a pracuje v jednom z brzdných režimů: opačný, dynamický, restorativní (viz obr. 1) v závislosti na způsobu buzení.
Zastavení elektropohonu přepnutím vinutí fází elektromotoru pro získání rotace pole v opačném směru (reverzní doraz) se používají při nutnosti rychlého zastavení strojního zařízení. V tomto případě se setrvačností rotor otáčí směrem k magnetickému toku, prokluzování motoru stane se více než jedním a okamžik se stane negativním.
U stejnosměrného motoru se pro provedení opačného brzdění změní spojení konců vinutí kotvy. V tomto případě proud a moment kotvy mění směr.
V obou případech se efektivní napětí zvětší, proto se za účelem omezení proudu a točivého momentu spínání provádí za současného začlenění rezistorů do obvodu kotvy nebo rotoru. Brzdná energie přicházející ze sítě je rozptýlena ve vinutích kotvy a v rezistorech.
Dynamické brzdění charakterizované tím, že elektrický stroj pracuje jako generátor (dynamo) s rozptylem brzdné energie v brzdových odporech a vinutí motoru.
Pro dynamické brzdění je kotva stejnosměrného motoru odpojena od zdroje energie a připojena k odporu, zatímco budicí vinutí zůstává pod napětím, u indukčních motorů je dynamického brzdění dosaženo přivedením stejnosměrného proudu na statorové vinutí motoru.
Stejnosměrný proud vytváří stacionární magnetické pole. Když se rotor otáčí, v jeho vinutích se indukuje EMF a objeví se proud. Interakcí rotorového proudu se stacionárním magnetickým polem vzniká brzdný moment. Hodnota brzdného momentu závisí na budícím proudu, otáčkách a odporu obvodu rotoru (kotvy).
V režimu rekuperačního brzdění se rotor (kotva) elektromotoru připojeného k síti otáčí rychlostí větší než ωo. V tomto případě proud změní svůj směr, elektrický stroj se stane generátorem pracujícím paralelně se sítí, brzdná energie mínus ztráty je dána síti.
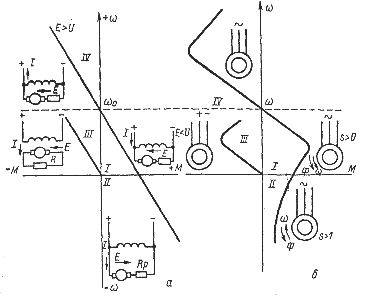
Rýže. 1. Zapínání a mechanické vlastnosti elektromotorů: nezávislé buzení (a) a asynchronní (b) v režimech: I — motor, II — opozice, III — dynamické brzdění, IV — generátor s dodávkou energie do sítě.
Rekuperační brzdění se používá u jeřábů, k udržení rychlosti při spouštění břemene, pro testování a práci pod zatížením motorů automobilů a traktorů, převodovek, převodovek pod zatížením, jakož i při přechodu z vyšší rychlosti na nižší. vícerychlostní motory.