Charakteristika jednofázových indukčních motorů
Jednofázové asynchronní motory jsou široce používány v technice a každodenním životě. Výroba jednofázových asynchronních elektromotorů od zlomku wattu až po stovky wattů je více než polovinou produkce všech nízkopříkonových strojů a jejich výkon se neustále zvyšuje.
Jednofázové motory jsou obecně rozděleny do dvou kategorií:
-
motory pro všeobecné použití «, které zahrnují průmyslové a domácí elektromotory;
-
motory automatických zařízení — řízené a neřízené střídavé motory a specializované nízkovýkonové elektrické stroje (tachogenerátory, rotační transformátory, selsiny atd.).
Významnou část asynchronních elektromotorů tvoří motory pro všeobecné použití, které jsou navrženy pro provoz v jednofázové síti střídavého proudu. Existuje však poměrně rozsáhlá skupina univerzálních asynchronních elektromotorů určených pro práci v jednofázových i třífázových sítích.
Konstrukce univerzálních motorů se prakticky neliší od tradiční konstrukce třífázových asynchronních strojů… Při provozu v třífázové síti mají tyto motory vlastnosti podobné vlastnostem třífázových motorů.
Jednofázové motory mají rotor s kotvou nakrátko a vinutí statoru lze vyrobit v různých verzích. Nejčastěji je na stator umístěno pracovní vinutí vyplňující dvě třetiny drážek a startovací vinutí vyplňující zbývající třetinu štěrbin. Běhová cívka je počítána pro nepřetržitý provoz a startovací cívka je počítána pouze pro počáteční období. Proto je vyroben z drátu s malým průřezem a obsahuje značný počet závitů. Pro vytvoření startovacího momentu obsahuje startovací vinutí prvky fázového posunu - rezistory nebo kondenzátory.
Asynchronní motory malého výkonu mohou být dvoufázové, kdy pracovní vinutí umístěné na statoru má dvě fáze smíšené v prostoru o 90°. V jedné z fází je neustále zahrnut prvek fázového posunu — kondenzátor nebo rezistor Top, zajišťující určitý fázový posun mezi proudy cívky.
Obvykle se nazývá motor s kondenzátorem trvale připojeným k jedné z fází kondenzátor… Kapacita kondenzátoru s fázovým posunem může být konstantní, ale v některých případech může být hodnota kapacity odlišná pro spouštění a pro provoz.
Charakteristickým znakem jednofázových asynchronních motorů je schopnost otáčet rotorem v různých směrech. Směr otáčení je určen směrem počátečního krouticího momentu.
Při nízkém odporu rotoru (Ccr < 1) proto nemůže jednofázový motor pracovat v reverzním režimu. Režim motoru odpovídá otáčkám rotoru 0 <n <nc při vyšších otáčkách, ve kterých probíhá režim generátoru.
Charakteristikou jednofázových motorů je, že jejich maximální točivý moment závisí na odporu rotoru. S rostoucím aktivním odporem rotoru klesá maximální točivý moment a při velkých hodnotách odporu Skr > 1 se stává záporným.
Při volbě typu elektromotoru pro pohon zařízení nebo mechanismu je nutné znát jeho charakteristiky, hlavní jsou momentové charakteristiky (počáteční rozběhový moment, maximální moment, minimální moment), frekvence otáčení, vibroakustická charakteristika. V některých případech jsou vyžadovány také energetické a hmotnostní charakteristiky.
Jako příklad jsou charakteristiky jednofázového motoru vypočteny s následujícími parametry:
-
počet fází — 1;
-
frekvence sítě — 50 Hz;
-
síťové napětí — 220 V;
-
aktivní odpor vinutí statoru — 5 ohmů;
-
indukční odpor vinutí statoru — 9,42 Ohm;
-
indukční odpor vinutí rotoru — 5,6 Ohm;
-
osová délka stroje — 0,1 m;
-
počet závitů ve vinutí statoru -320;
-
poloměr otvoru statoru — 0,0382 m;
-
počet kanálů — 48;
-
vzduchová mezera — 1,0 x 103 m.
-
činitel indukčnosti rotoru 1,036.
Jednofázové vinutí vyplňuje dvě třetiny štěrbin statoru.
Na Obr. 1 jsou znázorněny závislosti proudu jednofázového elektromotoru a elektromagnetického prokluzového momentu. V ideálním klidovém režimu má proud motoru spotřebovaný sítí především k vytvoření magnetického pole poměrně velkou hodnotu.
U simulovaného motoru je velikost magnetizačního proudu asi 30% počátečního proudu, u třífázových motorů se stejným výkonem - 10-15%.Elektromagnetický moment v ideálním režimu naprázdno má zápornou hodnotu, která se zvyšuje s rostoucím odporem obvodu rotoru. Na uklouznutí C= 1, elektromagnetický moment je nulový, což potvrzuje správnou funkci modelu.
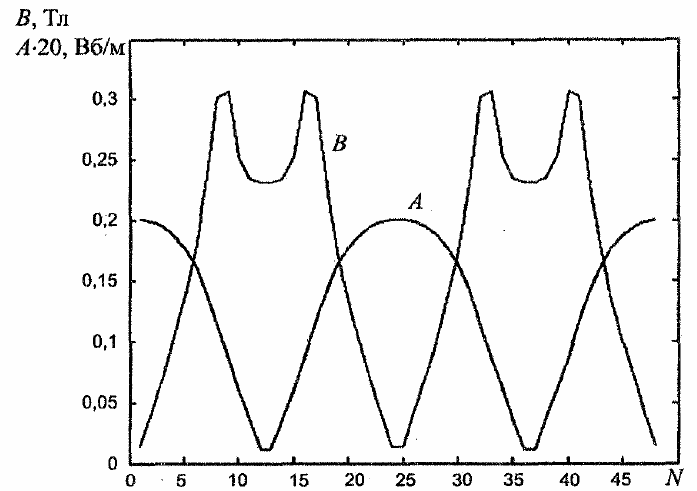
Obr. 1. Obálky vektorového potenciálu a magnetické indukce v mezeře motoru při klouzání s = 1
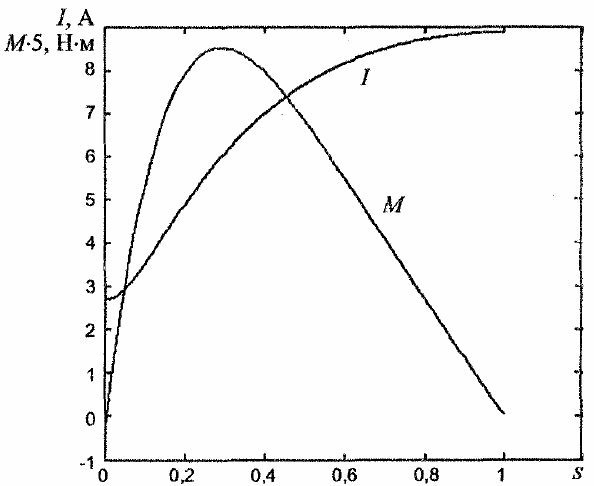
Rýže. 2. Závislost proudu a elektromagnetického momentu jednofázového asynchronního motoru na skluzu
Závislosti užitečného a spotřebovaného výkonu na skluzu (obr. 3) mají tradiční charakter. Účinnost motoru v ideálním volnoběhu má záporné znaménko odpovídající zápornému točivému momentu a účiník v tomto režimu je velmi nízký (0,125 pro simulovaný motor).
Nižší hodnota účiníku oproti třífázovým motorům se vysvětluje vysokou velikostí magnetizačního proudu. S rostoucí zátěží se hodnota účiníku zvyšuje a stává se srovnatelnou s hodnotou u třífázových motorů (obr. 4).
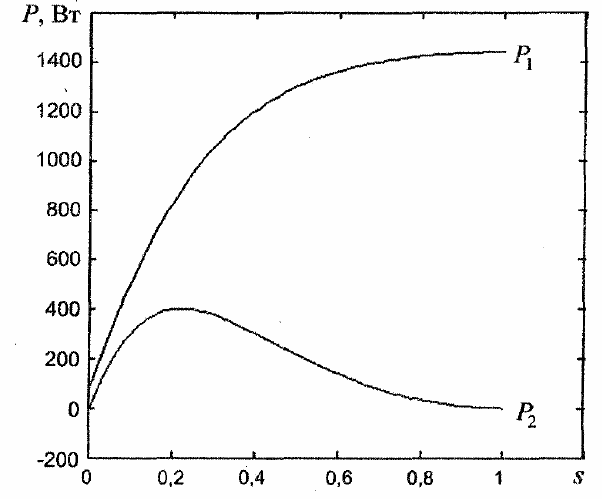
Rýže. 3. Závislost užitečného a spotřebovaného výkonu jednofázového asynchronního motoru na skluzu
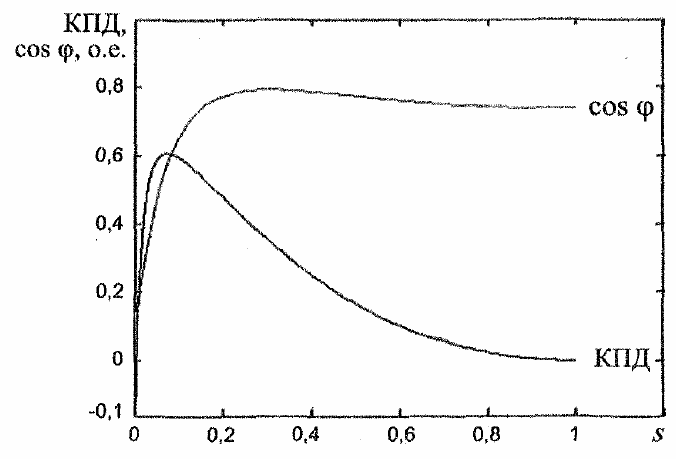
Rýže. 4. Závislost součinitele užitečného působení a výkonu jednofázového asynchronního motoru na skluzu
S rostoucím aktivním odporem rotoru se velikost elektromagnetického momentu zmenšuje a při kritických skluzech nad jednotu se stává záporným.
Na Obr. 5 ukazuje závislost elektromagnetického momentu jednofázového skluzového motoru pro různé hodnoty elektrické vodivosti sekundárního média motoru.
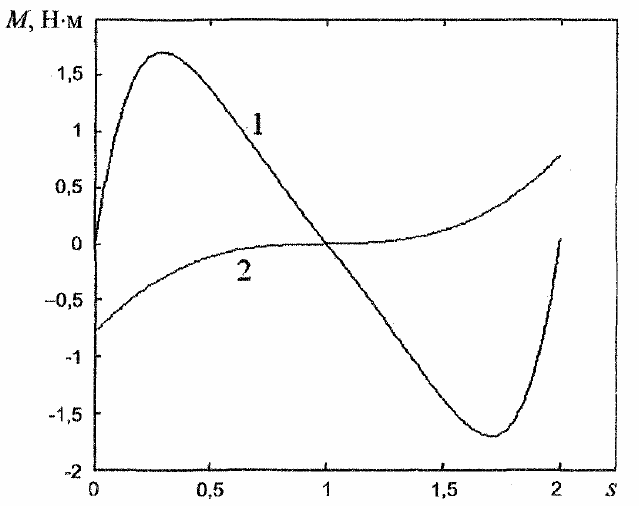
Rýže. 5.Závislost elektromagnetického momentu jednofázového prokluzového motoru při různých odporech rotoru (1 — 17 x 106 Cm / m, 2 — 1,7 x 106 Cm / m)
Kondenzátorové motory mají dvě vinutí trvale připojená k síti. Jeden z nich je připojen přímo k síti, druhý je zapojen do série s kondenzátorem, který zajišťuje potřebný fázový posun.
Obě vinutí zabírají stejný počet štěrbin na statoru a počet jejich závitů a kapacita kondenzátoru jsou vypočteny tak, že při určitém skluzu vzniká kruhové točivé magnetické pole. Nejčastěji se jako takový přijímá nominální skluz. V tomto případě se však počáteční točivý moment ukáže být mnohem menší než jmenovitý.
Magnetické pole v počátečním režimu je eliptické; vliv protiběžných složek magnetického pole je značně ovlivněn Pokud se kapacita kondenzátoru zvýší volbou z podmínky získání kruhového pole při rozběhu, pak dojde ke snížení točivého momentu a pokles energetických ukazatelů při jmenovitém skluzu.
Je možná i třetí varianta, kdy kruhové pole odpovídá skluzu s větší velikostí než v nominálním režimu. Tato cesta však také není optimální, protože nárůst točivého momentu je doprovázen výrazným nárůstem ztrát. Zvýšení rozběhového momentu kondenzátorového motoru lze dosáhnout zvýšením aktivního odporu rotoru. Tato metoda vede ke zvýšení ztrát při každém skluzu, v důsledku čehož klesá účinnost motoru.
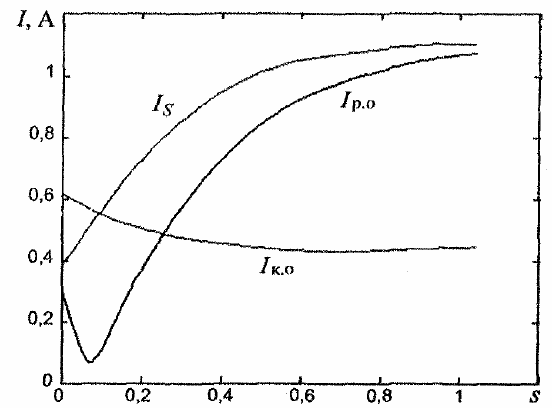
Rýže. 6.Závislost proudů motoru skluzového kondenzátoru (Azp.o — proud pracovní cívky, Azk.o — proud cívky kondenzátoru, E — proud motoru)
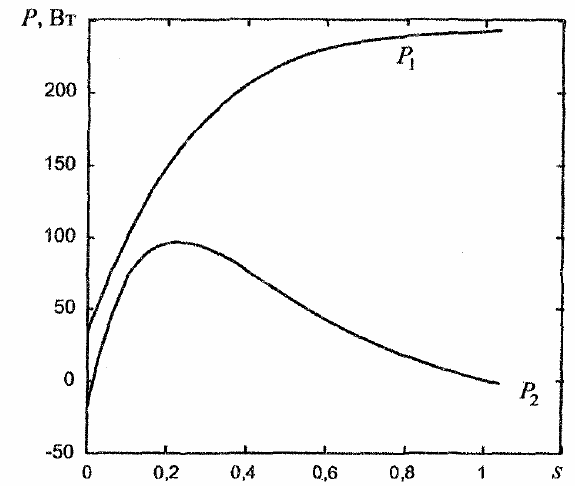
Rýže. 7. Závislost na spotřebovaném P1 a užitečném skluzovém výkonu P2 kondenzátoru
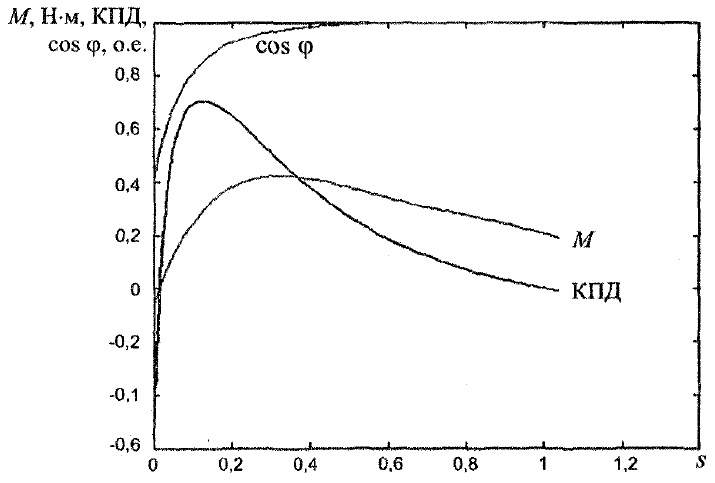
Rýže. 8. Závislost koeficientu užitečné akce a výkonu a elektromagnetického momentu motoru skluzového kondenzátoru
Kondenzátorový motor má vcelku uspokojivý energetický výkon, vysoký účiník, jehož hodnota převyšuje účiník třífázového motoru a při zvýšeném odporu rotoru a značné kapacitě vysoký rozběhový moment. Současně, jak bylo uvedeno výše, má motor sníženou hodnotu účinnosti.
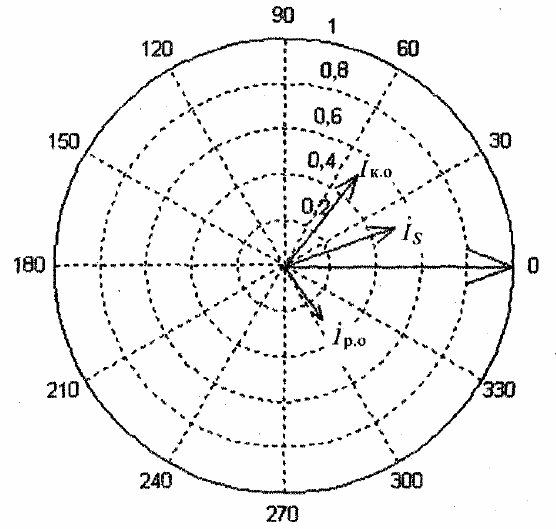
Rýže. 9. Vektorový diagram kondenzátorového motoru při skluzu s = 0,1
Vektorový diagram (obr. 9) ukazuje, že při zvolené hodnotě kapacity kondenzátoru vede proud cívkou kondenzátoru vzhledem k napětí sítě a proud pracovní cívky se zpožďuje. Diagram také ukazuje, že při posunutí blízko jmenovité hodnoty je magnetické pole motoru eliptické. Chcete-li získat kruhové pole, musí být hodnota kapacity kondenzátoru snížena tak, aby proudy ve dvou cívkách byly stejné velikosti.
Viz také k tomuto tématu:Vícerychlostní jednofázové kondenzátorové motory