Konstrukční formy asynchronních motorů
 Vnější strukturální formy asynchronní motory jsou určeny způsobem uložení motoru a formou jeho ochrany před vlivy prostředí. Běžný motorický výkon nohou je rozšířený (obr. 1, a). V tomto případě musí být hřídel motoru vodorovná. Motory s přírubami (obr. 1, b) jsou široce používány pro horizontální a vertikální instalace.
Vnější strukturální formy asynchronní motory jsou určeny způsobem uložení motoru a formou jeho ochrany před vlivy prostředí. Běžný motorický výkon nohou je rozšířený (obr. 1, a). V tomto případě musí být hřídel motoru vodorovná. Motory s přírubami (obr. 1, b) jsou široce používány pro horizontální a vertikální instalace.
Vyrábějí také řadové indukční motory, které nemají rám, koncové štíty, hřídel. Prvky takového motoru jsou zapuštěny do částí těla stroje a hřídel motoru je jedním z hřídelů stroje (často vřeteno) a lože je tělo sestavy stroje, například brusná hlava (obr. 2).
Motory speciální konstrukce jsou v zahraničí široce distribuovány, včetně motorů s malými radiálními rozměry a značnou délkou, a kotoučových motorů, zejména s válcovým statorem a prstencovým vnějším rotorem. Používají se i motory, při jejichž zapnutí se rotor, který má tvar kužele, pohybuje v axiálním směru a vyvíjí značnou přítlačnou sílu.
Tato síla slouží k uvolnění mechanické brzdy působící na hřídel motoru po odpojení motoru od sítě. Kromě toho se používají četné konstrukce motorů s připojenými převodovkami, převodovkami a mechanickými variátory, které zajišťují plynulou regulaci.
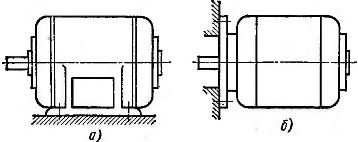
Rýže. 1. Konstrukce asynchronních motorů
Nevýhodou použití motorů se speciálními konstrukčními formami je obtížnost jejich výměny v případě nehody. Vadný elektromotor by se neměl vyměňovat, ale opravovat a stroj během opravy běžel naprázdno.
K pohonu strojů se používají motory s různými formami ochrany životního prostředí.
Stíněné motory mají mřížky, které zakrývají průduchy na koncových štítech. Tím se zabrání vniknutí cizích předmětů do motoru a také se zabrání tomu, aby se pracovník dotkl rotujících a živých částí. Aby se zabránilo padání kapiček kapaliny shora, jsou motory vybaveny spodními nebo vertikálními průduchy.
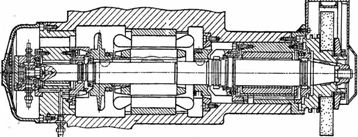
Rýže. 2. Vestavěný brusný motor
Když však takový elektromotor pracuje v dílně, jeho ventilátor spolu se vzduchem nasává prach, rozstřikuje chladicí kapalinu nebo olej a také drobné částice oceli nebo litiny, které přilnou k izolaci vinutí a vibrují vlivem střídavého magnetického pole se izolace rychle opotřebuje.
Uzavřené motory, jejichž koncová síta nemají ventilační otvory, mají spolehlivější ochranu před vlivy prostředí. Takové motory se stejnými rozměry jako chráněné mají kvůli horšímu chlazení menší výkon.Při stejných výkonech a rychlostech je uzavřený elektromotor 1,5-2krát těžší než chráněný, a proto je jeho cena vyšší.
Touha snížit velikost a cenu uzavřených motorů vedla k vytvoření uzavřených foukaných elektromotorů. Takový elektromotor má vnější ventilátor namontovaný na konci hřídele motoru proti hnacímu konci a zakrytý uzávěrem. Tento ventilátor fouká kolem krytu motoru.
Motory ventilátorů jsou výrazně lehčí a levnější než uzavřené. Foukací motory se nejčastěji používají k pohonu strojů na řezání kovů. Motory s jinými formami ochrany životního prostředí se k pohonu obráběcích strojů používají poměrně zřídka. K pohonu brusek se někdy používají zejména uzavřené elektromotory.
Elektromotory jsou určeny pro standardní napětí 127, 220 a 380 V. Stejný motor lze připojit do sítí s různým napětím, např. do sítí s napětím 127 a 220 V, 220 a 380 V. se dvěma napětími, tzv. statorové vinutí elektromotoru je zapojeno do trojúhelníku, pro větší - do hvězdy. Proud ve vinutí elektromotoru a napětí v nich budou s tímto zařazením v obou případech stejné. Kromě toho vyrábějí elektromotory 500 V, jejich statory jsou trvale zapojeny do hvězdy.
Asynchronní motory s kotvou nakrátko používané v mnoha průmyslových odvětvích se vyrábějí se jmenovitým výkonem 0,6–100 kW na synchronní rychlosti 600, 750, 1000, 1500 a 3000 ot./min.
Průřez vodičů vinutí elektromotoru závisí na velikosti proudu, který jím protéká. Při větším proudu bude mít vinutí motoru větší objem.Průřez magnetického obvodu je úměrný velikosti magnetického toku. Tímto způsobem jsou rozměry elektromotoru určeny vypočtenými hodnotami proudu a magnetického toku nebo jmenovitým momentem elektromotoru. Jmenovitý výkon motoru

kde P.n — jmenovitý výkon, kW, Mn- jmenovitý moment, N • m, nn- jmenovité otáčky, ot./min.
Jmenovitý výkon pro stejnou velikost motoru se zvyšuje s rostoucími jeho jmenovitými otáčkami. Proto jsou pomaloběžné elektromotory větší než rychloběžné motory stejného výkonu.
Při broušení malých otvorů jsou nutné velmi vysoké otáčky brusného vřetena, aby bylo dosaženo odpovídající řezné rychlosti. Takže při broušení kotoučem o průměru 3 mm rychlostí pouhých 30 m/s by se rychlost vřetena měla rovnat 200 000 otáčkám za minutu. Při vysokých otáčkách vřetena lze upínací sílu výrazně snížit. Zároveň se snižuje broušení kotoučů a ohýbání trnu, zvyšuje se povrchová úprava a přesnost obrábění.
V souvislosti s výše uvedeným průmysl využívá četné modely tzv. Elektrická vřetena s rychlostí otáčení 12 000-144 000 ot./min a vyšší. Elektrovřeteno (obr. 3, a) je brusné vřeteno na valivých ložiskách se zabudovaným vysokofrekvenčním motorem s kotvou nakrátko. Rotor motoru je umístěn mezi dvěma ložisky na konci vřetena proti brusnému kotouči.
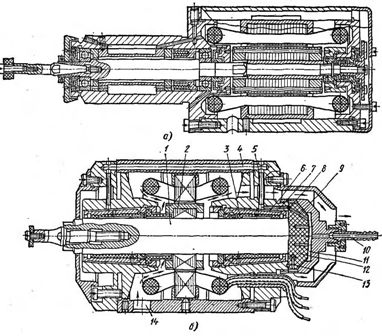
Rýže. 3. Elektrovřetena
Stator elektrovřetena je sestaven z elektroocelového plechu. Na něm je umístěna bipolární cívka.Rotor motoru při otáčkách do 30 000-50 000 ot./min je rovněž vytáčen z plechu a dodáván s klasickým vinutím nakrátko. Mají tendenci co nejvíce zmenšovat průměr rotoru.
Volba typu ložiska je zvláště důležitá pro provoz elektrovřeten. Běžně se používají přesná kuličková ložiska, která pracují s předpětím vytvořeným pomocí kalibrovaných pružin. Taková ložiska se používají pro rychlosti otáčení, které nepřesahují 100 000 otáček za minutu.
Aerostatická ložiska jsou široce používána v průmyslu (obr. 3, b). Hřídel 1 vysokofrekvenčního elektromotoru se otáčí ve vzduchem mazaných ložiskách 3. Axiální zatížení je absorbováno vzduchovým polštářem mezi koncem hřídele a opěrným ložiskem 12, proti kterému je hřídel přitlačována pod tlakem vzduchu přiváděného do vnitřku skříně otvorem 14 pro chlazení motoru. stlačený vzduch prochází filtrem a vstupuje přes armaturu 10 v komoře 11. Odtud přes kanál 9 a kruhovou drážku 8 prochází vzduch do kanálu 7 a komory 6. Odtud vzduch vstupuje do ložiska mezera. Vzduch je přiváděn do levého ložiska potrubím 5 a kanály 4 ve skříni motoru.
Odpadní vzduch je odváděn kanálky 13. Vzduchový polštář v mezeře nosného ložiska je tvořen vzduchem procházejícím z komory 11 ložiskem z porézního uhlíkového grafitu. Každé ložisko má kuželovou mosaz. Je do ní vtlačena uhlíkově grafitová vložka, jejíž póry jsou vyplněny bronzem. Před spuštěním elektrovřetena je přiváděn vzduch a mezi vřetenem a pouzdry se vytvářejí vzduchové polštáře. To eliminuje tření a opotřebení ložisek při spouštění.Poté se motor zapne, rychlost rotoru 2 dosáhne jmenovité rychlosti za 5-10 s. Když je motor vypnutý, rotor 2 dobíhá 3-4 minuty. Ke zkrácení této doby se používá elektrická brzda.
Použití airbagů drasticky snižuje ztráty třením v elektrovřetenu, spotřeba vzduchu je 6-25 m3/h.
Použity byly také elektrovřetena na ložiskách s kapalinovým mazáním. Jejich provoz vyžaduje nepřetržitou cirkulaci oleje pod vysokým tlakem, jinak se zahřívání ložisek stává nepřijatelným.
Výroba vysokofrekvenčních elektromotorů vyžaduje precizní výrobu jednotlivých dílů, dynamické vyvážení rotoru, přesnou montáž a zajištění přísné rovnoměrnosti mezery mezi statorem a rotorem. Frekvence proudu dodávajícího vysokofrekvenčnímu elektromotoru se volí v závislosti na požadovaných otáčkách elektromotoru:

kde nJe-li synchronní frekvence otáčení elektromotoru, ot/min, f frekvence proudu, Hz, p je počet pólů, protože p = 1, pak

Při synchronních rychlostech otáčení elektrických vřeten 12 000 a 120 000 ot./min by se aktuální frekvence měla rovnat 200 a 2000 Hz, v tomto pořadí.
K napájení vysokofrekvenčních motorů se používají speciální generátory. Na Obr. 4 znázorňuje třífázový synchronní indukční generátor. Stator generátoru má široké a úzké štěrbiny. Budicí cívka, která je umístěna v širokých štěrbinách statoru, je napájena stejnosměrným proudem. Magnetické pole vodičů této cívky je uzavřeno přes zuby statoru a výstupky rotoru, jak je znázorněno na obr. 4 s tečkovanou čarou.
Když se rotor otáčí, magnetické pole pohybující se podél výstupků rotoru křižuje závity vinutí střídavého proudu umístěného v úzkých štěrbinách statoru a indukuje střídavé e. atd. c. Frekvence tohoto e. atd. v. závisí na rychlosti a počtu uší rotoru. Elektromotorické síly indukované stejným tokem ve vinutích vinutí se navzájem ruší v důsledku blížící se aktivace cívek. Budicí cívky jsou napájeny z usměrňovače připojeného k síti. Stator a rotor mají magnetická jádra z elektrooceli.
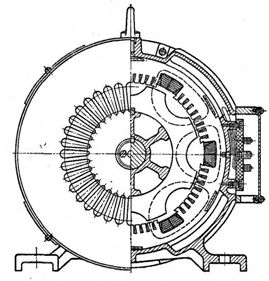
Rýže. 4. Vysokofrekvenční indukční generátor
Generátory popsané konstrukce jsou vyráběny pro jmenovitý výkon od 1 do 3 kW a frekvence od 300 do 2400 Hz. Generátory jsou poháněny asynchronními motory se synchronními otáčkami 3000 ot./min.
Indukční generátory se zvýšenou frekvencí začínají být nahrazovány polovodičovými (tyristorovými) měniči. V tomto případě obvykle poskytují možnost změny frekvence proudu a tedy možnost nastavení rychlosti otáčení elektromotoru. Pokud je při takové regulaci udržováno konstantní napětí, pak se provádí konstantní regulace výkonu. Pokud je poměr napětí k frekvenci proudu (a tedy i magnetického toku motoru) udržován konstantní, pak se regulace provádí s konstantní při všech otáčkách po dlouhou dobu přípustný moment.
Výhodou pohonů s tyristorovým frekvenčním měničem a asynchronním motorem s kotvou nakrátko je vysoká účinnost a snadné použití. Nevýhodou je stále vysoká cena.Ve strojírenství se nejvíce doporučuje použít takový pohon pro vysokofrekvenční motory. Experimentální pohony tohoto typu u nás vznikly.
Dvoufázové asynchronní motory s nízkým výkonem se často používají ve výkonných pohonech obráběcích strojů. Stator takového motoru má dvě vinutí: budicí vinutí 1 a řídicí vinutí 2 (obr. 5, a). Rotor 4 ve veverčí kleci má velký aktivní odpor. Osy cívek jsou na sebe kolmé.
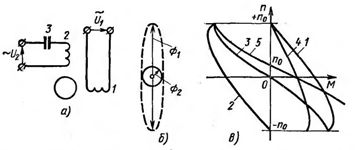
Rýže. 5. Schéma dvoufázového asynchronního motoru a jeho charakteristiky
Na vinutí jsou přivedena napětí Ul a U2. Když je kondenzátor 3 připojen k obvodu cívky 2, proud v něm převyšuje proud v cívce 1. V tomto případě se vytvoří rotující eliptické magnetické pole a rotor 4 veverky se začne otáčet. Pokud snížíte napětí U2, sníží se i proud v cívce 2. To povede ke změně tvaru elipsy rotujícího magnetického pole, které se stále více prodlužuje (obr. 5, b).
Motor s eliptickým polem lze považovat za dva motory na jedné hřídeli, z nichž jeden pracuje s pulzujícím polem F1 a druhý s kruhovým polem F2. Pulzující motor F1 si lze představit jako dva identické indukční motory s kruhovým polem, které se otáčí v opačných směrech.
Na Obr. 5,c ukazuje mechanické charakteristiky 1 a 2 indukčního motoru s kruhovým točivým polem a značným aktivním odporem rotoru při otáčení v různých směrech. Mechanickou charakteristiku 3 jednofázového motoru lze sestrojit odečtením momentů M charakteristik 1 a 2 pro každou hodnotu n.Při libovolné hodnotě n se točivý moment jednofázového motoru s vysokým odporem rotoru zastaví. Mechanická charakteristika motoru s kruhovým polem je znázorněna křivkou 4.
Mechanickou charakteristiku 5 dvoufázového motoru lze sestrojit odečtením momentů M charakteristik 3 a 4 při libovolné hodnotě n. Hodnota n0 je rychlost otáčení dvoufázového indukčního motoru při ideálních volnoběžných otáčkách. Úpravou napájecího proudu cívky 2 (obr. 5, a) je možné změnit strmost charakteristiky 4 (obr. 5, c), a tím i hodnotu n0. Tímto způsobem se provádí regulace otáček dvoufázového indukčního motoru.
Při provozu s vysokými hodnotami skluzu jsou ztráty v rotoru poměrně značné. Z tohoto důvodu se uvažovaná regulace používá pouze pro pomocné pohony s nízkým výkonem. Pro zkrácení doby zrychlení a zpomalení se používají dvoufázové indukční motory s dutým rotorem. V takovém motoru je rotorem tenkostěnný hliníkový dutý válec.