Elektrický pohon elektrických kladkostrojů a jeřábových nosníků
 Závěsné elektrické vozíky (elektrifikované kladkostroje, kladkostroje a jeřábové nosníky) slouží ke zvedání a přemisťování břemen a strojních součástí při montážních a opravárenských pracích v průmyslových areálech. Elektrické kladkostroje, kladkostroje a jeřáby jsou menší než mostové jeřáby, což snižuje velikost průmyslových budov a jejich údržba nevyžaduje kvalifikovaný personál.
Závěsné elektrické vozíky (elektrifikované kladkostroje, kladkostroje a jeřábové nosníky) slouží ke zvedání a přemisťování břemen a strojních součástí při montážních a opravárenských pracích v průmyslových areálech. Elektrické kladkostroje, kladkostroje a jeřáby jsou menší než mostové jeřáby, což snižuje velikost průmyslových budov a jejich údržba nevyžaduje kvalifikovaný personál.
Závěsné elektrické vozíky jsou určeny pro zvedání a přemisťování zboží ve výrobních provozech po přesně vymezené dráze.
Elektrický vozík (obr. 1) se skládá ze 3 hlavních částí: zvedacího mechanismu (elektrického kladkostroje) určeného ke zvedání (spouštění) a přidržování břemene, pohybového mechanismu (podvozku) určeného k pohybu zvedaného břemene do přesně definovaného směru polohy. , jednokolejka, která definuje horizontální pohyb ve dvou směrech.
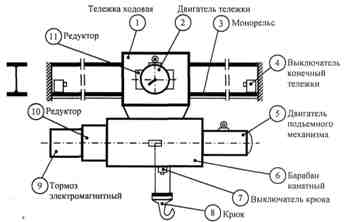
Rýže. 1. Kinematické schéma závěsného elektrického vozíku
Elektrický kladkostroj je namontován na pracovním vozíku a obsahuje následující vybavení: elektromotor (5) zvedacího mechanismu, válcová převodovka (10) pro snížení rychlosti otáčení elektromotoru na hodnotu, která poskytuje danou lineární rychlost zvednutí (spuštění) háku, elektromagnetická brzda (9), pro zastavení motoru hřídele při odpojení od sítě nebo vymizení napětí v síti se aktivuje brzdná brzda působící na sílu pružin, při hřídele jsou obtočeny kolem hřídele, koncový spínač (7) háku, pro omezení zvednutí háku, při stisknutí se motor odpojí od sítě a zpomalí, lanový buben (6), pro navíjení ( odvíjení) a uložení lana, háku (8), pro zajištění zvednutého nákladu .
Podvozek je namontován na jednokolejnici (3), podepřený pojezdovými koly na spodních přírubách dvoukolejnice. Pohon kol přes válcovou převodovku (11) elektromotorem (2).
Jednokolejka — I-nosník s koncovými spínači (4) pro omezení horizontálního pohybu.
Elektrický kladkostroj TEP-1 (nosnost 1 t, napětí 380 V) se skládá ze zvedacích a posuvných mechanismů s jednotlivými elektrickými pohony. Pracovní buben 2 je poháněn motorem 20 přes planetovou převodovku sestávající ze satelitů 5, 7, 8, blokových kol 13, centrálních kol 6, 9, unašeče 14, 15. Hlavní hnací hřídel 4 je při vypnutém motoru zastaven kotouči 10 působením pružiny 11.
Pro pohon zvedacího mechanismu rychlostí 6,5-6,9 m/s je použit asynchronní motor se zvýšeným skluzem typu AOS-32-4M (výkon 1,4 kW při 1320 ot/min a pracovní cyklus = 25 %).Pohyb háku nahoru je omezen koncovým spínačem.
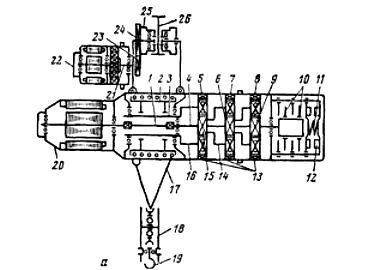
Rýže. 2. Elektrický pohon elektrického kladkostroje TEP -1: 1 — pracovní buben, 3 — dutý hřídel, 4 — pracovní hřídel, 5, 7, 8 — satelity, 6, 9, 15 — centrální ozubená kola, 10 — brzdové kotouče, 11 — brzdová pružina, 12 — elektromagnety, 13 — blokové převody, 14, 16, 21 — unašeče, 17 — lanko, 18 — závěs, 19 — hák, 20 — elektromotor pro zvedání břemene, 22 — elektromotor vozíku, 23, 24 — ozubená kola, 25 — válec, 26 — jednokolejka.
Obrázek 3 ukazuje činnost kladkostroje. Účinnost elektrického kladkostroje se zvyšuje na 0,58 se zvýšením hmotnosti zvednutého břemene na 1000 kg.
Zajímavý režim provozu motoru 4 při spouštění břemene: při hmotnosti břemene menší než 425 kg elektromotor pracuje v režimu motoru a při hmotnosti nad 425 kg — v režimu generátoru. Pro překonání klidového momentu zvedacího mechanismu tedy stačí zátěž o hmotnosti 425 kg.
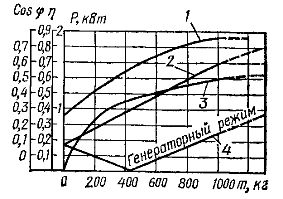
Rýže. 3. Provozní vlastnosti elektrického kladkostroje: 1 — ssphi elektromotoru, 2 — výkon elektromotoru při zvedání břemene, 3 — účinnost, 4 — výkon elektromotoru při spouštění břemene.
K pohonu podvozku elektrického kladkostroje slouží asynchronní elektromotor 22 (obr. 2) typu TEM-0,25 (výkon 0,25 kW při 1410 ot./min a pracovní cyklus = 25 %) s vestavěnou planetovou jednostupňovou převodovkou a ozubené kolo 23, 24, přenášející rotaci válečků 25. Na pohybových mechanismech nejjednodušších kladkostrojů nejsou namontována brzdová zařízení. Pohyb kladkostroje po nosníku v obou směrech je omezen mechanickými dorazy.
 Výložníkový jeřáb se liší od kladkostroje v tom, že nosník, na kterém se kladkostroj pohybuje, se může pohybovat po výrobní místnosti a je poháněn elektromotorem s kotvou nakrátko nebo fázovým rotorem. Jeřábový nosník, který má elektrický pohon, je vyroben ve formě jediného nosníku, na kterém se pohybuje elektrický podvozek.
Výložníkový jeřáb se liší od kladkostroje v tom, že nosník, na kterém se kladkostroj pohybuje, se může pohybovat po výrobní místnosti a je poháněn elektromotorem s kotvou nakrátko nebo fázovým rotorem. Jeřábový nosník, který má elektrický pohon, je vyroben ve formě jediného nosníku, na kterém se pohybuje elektrický podvozek.
Třífázové asynchronní motory s rotorem nakrátko slouží k pohonu přívěsných elektromobilů a pouze s vysokou nosností a nutností regulace otáček a plynulého „přistání“ zátěže-asynchronní motory s fázovým rotorem.
Kvůli nedostatku nízké rychlosti potřebné pro hladké přistání břemen nebo přesné zastavení jeřábu musí pracovník pravidelně zapínat a vypínat elektromotory, což zvyšuje počet startů a způsobuje zahřívání vinutí a také snižuje odolnost kontaktů proti opotřebení. Proto jsou u některých jeřábů elektrické pohony pro zdvih a pojezd se dvěma provozními rychlostmi: jmenovitou a redukovanou, které jsou zajištěny použitím dvourychlostních asynchronních motorů namísto jednorychlostních nebo přídavného mikropohonu.
 Nízkorychlostní (0,2 — 0,5 m/s) závěsné elektrické vozíky poháněné klecovými motory jsou obvykle ovládány z úrovně podlahy (země) pomocí závěsných tlačítkové stanice… U vzduchových vozíků a jeřábů s kabinou pro obsluhu (při rychlosti 0,8 — 1,5 m/s) jsou motory s fázovým rotorem řízeny regulátory.
Nízkorychlostní (0,2 — 0,5 m/s) závěsné elektrické vozíky poháněné klecovými motory jsou obvykle ovládány z úrovně podlahy (země) pomocí závěsných tlačítkové stanice… U vzduchových vozíků a jeřábů s kabinou pro obsluhu (při rychlosti 0,8 — 1,5 m/s) jsou motory s fázovým rotorem řízeny regulátory.
Elektromotory kladkostrojů a mostových jeřábů jsou ovládány pomocí reverzibilní magnetické startéry a startovací tlačítka zavěšená na ohebném pancéřovém kabelu.Napětí do cívek a kontaktů stykačů pro zvedání KM1 (obr. 4), spouštění KM2, pohyb KMZ vpřed a vzad KM4 je přiváděno přes jistič a kabel nebo troleje. Pohyb zvedacího zařízení nahoru je omezen koncovým spínačem. SQ.
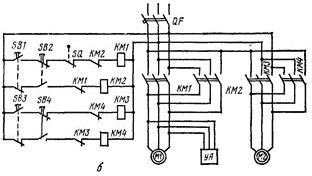
Rýže. 4. Elektrické schéma jeřábového nosníku
Blokování reverzačních stykačů motorů od současného zapnutí se provádí pomocí dvouobvodových tlačítek a mechanické blokace samotných stykačů (nebo rozepnutí pomocných kontaktů stykačů).
U elektrických kladkostrojů a mostových jeřábů nejsou spouštěcí tlačítka obejita příslušnými blokovacími kontakty zapínacího stykače, což brání tomu, aby kladkostroj pokračoval v činnosti poté, co operátor uvolní závěsnou stanici tlačítka. Současně s motorem zvedání je aktivován elektromagnet UA, který otevírá brzdu.
Maximální přípustná doba spouštění pro zdvihací mechanismy je 3 — 5 s, pro pohybové mechanismy — 10 — 15 s.
Můžete také vidět: Elektrická zařízení a řetězy elektrických kladkostrojů
Způsob činnosti motorů elektrických nákladních automobilů, elektrických kladkostrojů a mostových jeřábů závisí na jejich účelu. Pokud se zboží přesouvá na mostových jeřábech na krátké vzdálenosti, pak motory pracují v ostudném krátkodobém režimu (například ve vozících obsluhujících úseky dílen nebo skladů).

U mostových jeřábů přepravujících zboží přes území závodu na relativně velké vzdálenosti jsou provozní režimy zvedacích a pohyblivých motorů různé: první je charakterizován krátkodobým režimem, druhý dlouhodobým. motorů pro zdvihání a přemísťování elektrických kladkostrojů, kladkostrojů a portálových jeřábů je určeno stejně jako u motorů mostových jeřábových mechanismů.