Co je lineární diferenciální transformátor
Střídavý proud tekoucí v jedné primární cívce lze použít k indukci střídavého napětí ve dvou sekundárních cívkách. Pokud jsou dvě sekundární vinutí identická ve svých charakteristikách a dvě dráhy magnetických siločar procházejících těmito cívkami jsou také totožné, pak budou dvě generovaná sekundární napětí stejná. Zařízení s touto strukturou se nazývá diferenciální transformátor.

Diferenciální transformátor může mít vzduchové jádro nebo magnetické jádro.
Dvě sekundární vinutí mohou být zapojena buď ve fázi, nebo proti fázi, v prvním případě se jejich napětí sčítají a ve druhém případě se jedno od druhého odečítá.
Primární vinutí se používá k buzení dvou symetrických sekundárních vinutí, z nichž druhé lze připojit tak, že sekundární napětí se navzájem sčítají nebo ubírají.
Pokud jsou dvě cívky připojeny podle schématu odčítání, pak při stejných hodnotách jejich napětí bude celkové sekundární napětí nulové.Pokud jsou charakteristiky magnetického obvodu jedné z těchto cívek záměrně změněny ve srovnání s charakteristikami magnetického obvodu druhé cívky, pak se obě sekundární napětí budou lišit a jejich rozdíl nebude nulový.
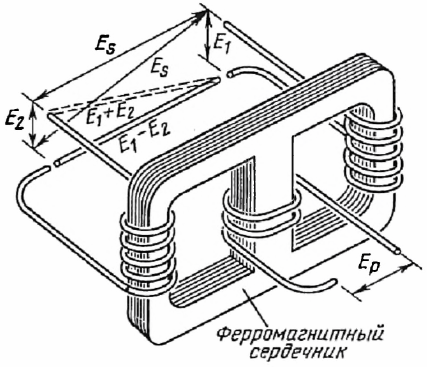
Za těchto podmínek fáze celkového sekundárního napětí udává, která dráha magnetických siločar má největší odpor, přičemž amplituda tohoto napětí odráží hodnotu rozdílu reluktancí.
Pokud je stejná akce použita ke zvýšení magnetického odporu jedné cesty a ke snížení magnetického odporu druhé cesty, pak výstupní napětí odrážející tuto akci dosáhne své maximální hodnoty a přenosová funkce bude mít největší možnou linearitu.
Protože žádná dvě sekundární vinutí a žádné dvě cesty magnetických siločar nemohou být přesně stejné, má diferenciální transformátor vždy určité výstupní napětí, dokonce i s nulovým užitečným signálem na vstupu.
Charakteristiky magnetických obvodů jsou navíc nelineární. V důsledku této nelinearity se objevují i harmonické složky základní frekvence přiváděného primárního budícího napětí, které nelze v žádném uspořádání sekundárních vinutí plně kompenzovat.
Reluktance feromagnetického obvodu se vzduchovou mezerou je funkcí šířky mezery se silnou nelinearitou. V důsledku toho je indukčnost cívky navinuté kolem takového obvodu také nelineární funkcí šířky mezery.
Současně, pokud existují dvě víceméně totožné dráhy magnetických siločar, každá se vzduchovou mezerou, a pokud se šířka jedné mezery zvětšuje, když se šířka druhé zmenšuje, pak rozdíl v magnetickém odporu těchto dráhy se mohou dostatečně lineárně měnit.
Základní principy diferenciálního transformátoru jsou v praxi ztělesněny v různých specifických konstrukčních konfiguracích pro mnoho různých účelů.
Lineární variabilní diferenciální transformátor (LVDT) je pasivní převodník (senzor), který pracuje na principu vzájemné indukce a lze s ním měřit posuv, deformaci, tlak a hmotnost.
Nejčastěji se pomocí NS dají měřit výchylka v rozsahu několika milimetrů až centimetrů, přímo převádí výchylku I'm na elektrický signál.
Indukčnost cívky v blízkosti nebo uvnitř, ve které se nachází feromagnetická tyč, je funkcí souřadnice polohy této tyče vzhledem k cívce se silnou nelinearitou.
Pokud je taková tyč feromagnetickým obvodem nějakého diferenciálního transformátoru, pak sekundární diferenciální napětí může sloužit jako indikátor posunutí tyče, v závislosti na tomto posunutí dostatečně lineárně.
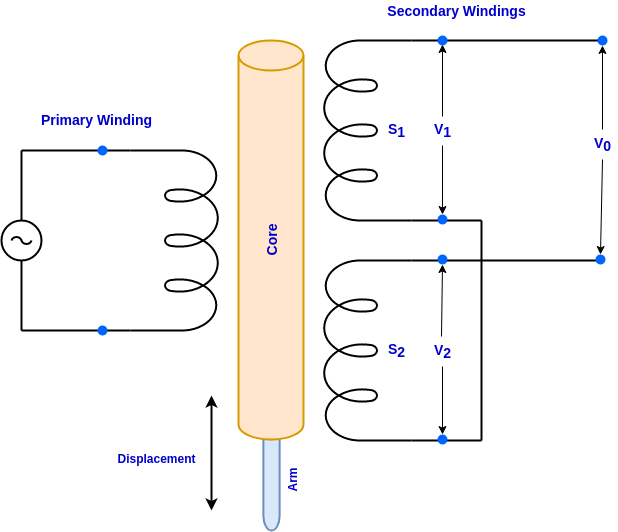
Primární vinutí je připojeno ke zdroji střídavého proudu. Dvě sekundární vinutí SI a S2 mají stejný počet závitů a jsou namontována v sérii proti sobě.
EMF indukované v těchto vinutích je tedy vzájemně fázově posunuto o 180° a tím se celkový efekt ruší.

Polohu symetrického feromagnetického jádra navrženého v konstrukci diferenciálního transformátoru lze určit z fáze a amplitudy sekundárního napětí.
Absolutní rozdíl mezi dvěma sekundárními napětími udává absolutní hodnotu posunutí tyče vzhledem ke středu nebo nulové poloze a fáze tohoto rozdílného napětí udává směr posunutí.
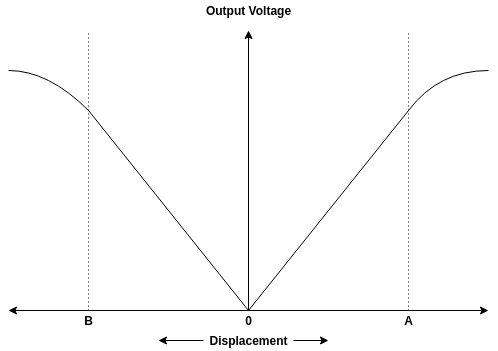
Křivka B / I lineárního variabilního diferenciálního transformátoru je znázorněna na obrázku.
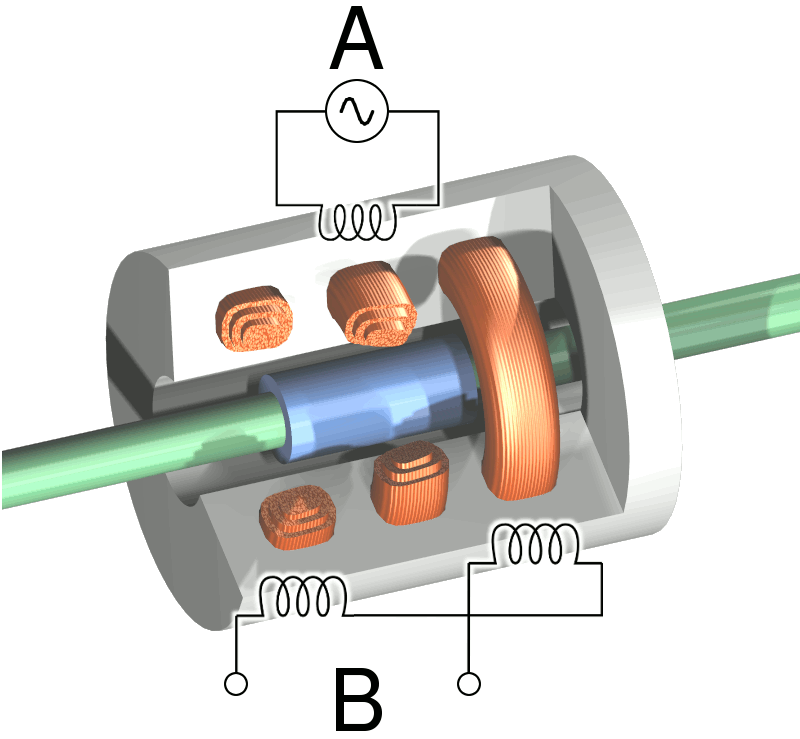
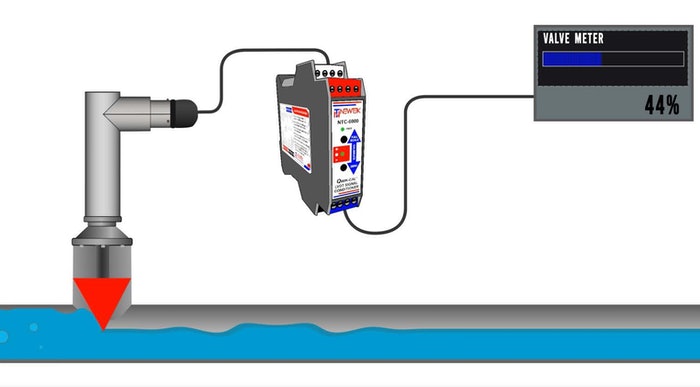
Příklad použití lineárního diferenciálního transformátoru pro zajištění přesné polohové zpětné vazby pro monitorování a řízení ventilů v chemických závodech, elektrárnách a zemědělských zařízeních:
Ponorné snímače vzdálenosti LVDT D5W:
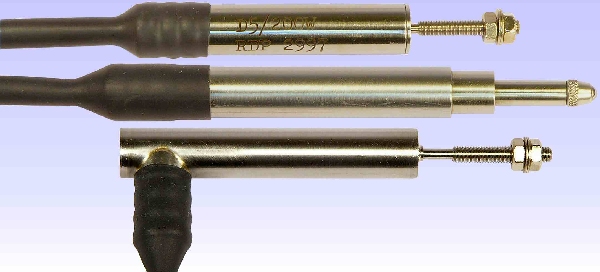
Tyto převodníky jsou určeny k měření posunutí a polohy. Poskytují přesné měření polohy kotvy (kluzné části) vzhledem k pouzdru snímače posuvu.
Ponorné snímače posuvu jsou navrženy tak, aby prováděly měření při ponoření do vhodných kapalin. Nemagnetické kapaliny mohou zaplavit trubku kotvy, aniž by to ovlivnilo činnost převodníku. Tyto měniče jsou k dispozici ve verzi s neřízenou nebo s vratnou pružinou.
Při automatizaci různých technologických procesů se často používají dvoustranné měniče s diferenciálním transformátorem s feromagnetickým jádrem, které je na svých koncích vloženo ve stejných vzdálenostech do dvou sekundárních cívek.
Jak se tyč axiálně pohybuje, posouvá se hlouběji do jedné z těchto cívek a vysouvá se z druhé.Absolutní rozdíl mezi dvěma sekundárními napětími udává absolutní hodnotu posunutí tyče vzhledem ke středu nebo nulové poloze a fáze tohoto rozdílného napětí udává směr posunutí.
Rotační AC diferenciální transformátor:
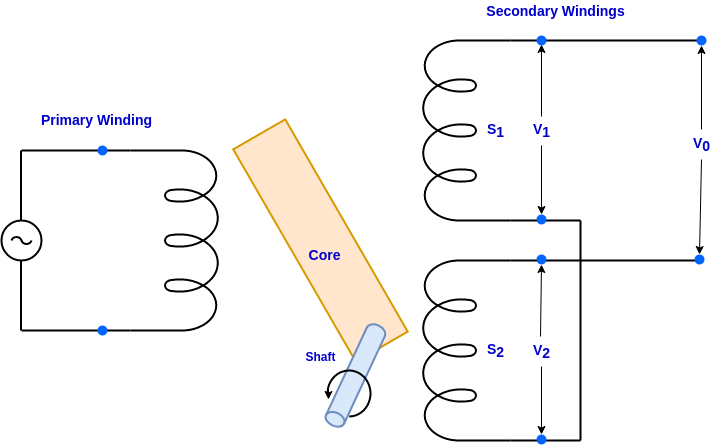
Rotační proměnný diferenciální transformátor je pasivní transformátor založený na principu vzájemné indukce. Používá se k měření úhlového posunutí.
Jeho konstrukce je podobná jako u lineárního variabilního diferenciálního transformátoru s výjimkou konstrukce jádra.
Primární vinutí je připojeno ke zdroji střídavého proudu. Dvě sekundární vinutí SI a S2 mají stejný počet závitů a jsou namontována v sérii proti sobě.
Výhody lineárního diferenciálního transformátoru:
-
Mezi jádrem a cívkami není žádný fyzický kontakt;
- Vysoká spolehlivost;
-
Rychlá odezva;
-
Dlouhá životnost.
Jedná se o nejpoužívanější indukční snímač díky své vysoké přesnosti.