Provozní režimy synchronních generátorů, provozní vlastnosti generátorů
 Hlavní veličiny charakterizující synchronní generátor jsou: svorkové napětí U, nabíjení I, zdánlivý výkon P (kVa), otáčky rotoru za minutu n, účiník cos φ.
Hlavní veličiny charakterizující synchronní generátor jsou: svorkové napětí U, nabíjení I, zdánlivý výkon P (kVa), otáčky rotoru za minutu n, účiník cos φ.
Nejdůležitější vlastnosti synchronního generátoru jsou následující:
-
klidová charakteristika,
-
vnější charakteristika,
-
regulační charakteristika.
Bezzátěžová charakteristika synchronního generátoru
Elektromotorická síla generátoru je úměrná velikosti magnetického toku Ф vytvářeného budicím proudem iv a počtu otáček n rotoru generátoru za minutu:
E = cnF,
kde s — faktor proporcionality.
Přestože velikost elektromotorické síly synchronního generátoru závisí na počtu otáček rotoru, nelze ji upravit změnou rychlosti otáčení rotoru, protože frekvence elektromotorické síly souvisí s počtem otáček rotoru. otáčky rotoru generátoru, které musí být udržovány konstantní.
Zbývá tedy jediný způsob, jak upravit velikost elektromotorické síly synchronního generátoru — jedná se o změnu hlavního magnetického toku F. Té se obvykle dosáhne úpravou budícího proudu iw pomocí reostatu zavedeného do budícího obvodu. generátoru. V případě, že je budicí cívka napájena proudem z generátoru stejnosměrného proudu umístěného na stejné hřídeli s tímto synchronním generátorem, upraví se budicí proud synchronního generátoru změnou napětí na svorkách generátoru stejnosměrného proudu.
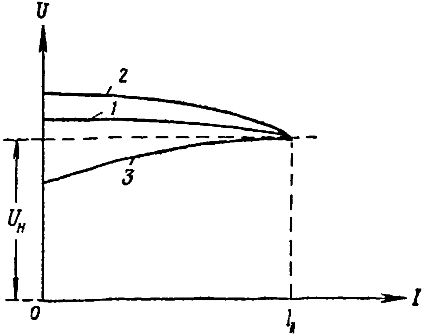
Závislost elektromotorické síly E synchronního generátoru na budícím proudu iw při konstantní jmenovité rychlosti rotoru (n = konst) a zatížení rovném nule (1 = 0) se nazývá volnoběžná charakteristika generátoru.
Obrázek 1 ukazuje charakteristiku generátoru naprázdno. Zde je vzestupná větev 1 křivky odstraněna, když se proud iv zvyšuje z nuly na ivm, a sestupná větev 2 křivky – když se iv mění z ivm na iv = 0.
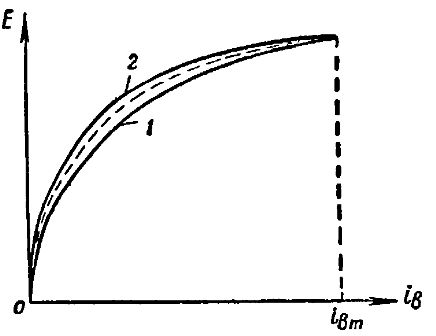
Rýže. 1. Klidová charakteristika synchronního generátoru
Divergence mezi vzestupnou 1 a sestupnou 2 větví je vysvětlena zbytkovým magnetismem. Čím větší je plocha ohraničená těmito větvemi, tím větší jsou energetické ztráty v oceli magnetizačního reverzního synchronního generátoru.
Strmost stoupání křivky naprázdno v jejím počátečním přímém úseku charakterizuje magnetický obvod synchronního generátoru. Čím nižší je ampérotáčkový průtok ve vzduchových mezerách generátoru, tím strmější bude charakteristika volnoběhu generátoru za jiných podmínek.
Vnější charakteristiky generátoru
Svorkové napětí zatíženého synchronního generátoru závisí na elektromotorické síle E generátoru, úbytku napětí v činném odporu jeho statorového vinutí, úbytku napětí v důsledku disipační samoindukční elektromotorické síly Es a úbytku napětí v důsledku el. reakce kotvy.
Je známo, že disipativní elektromotorická síla Es závisí na disipativním magnetickém toku Fc, který neproniká magnetickými póly rotoru generátoru, a proto nemění stupeň magnetizace generátoru. Disipativní samoindukční elektromotorická síla Es generátoru je relativně malá, a proto ji lze prakticky zanedbat. Podle toho lze tu část elektromotorické síly generátoru, která kompenzuje disipativní samoindukční elektromotorickou sílu Es považovat prakticky za rovnou nule. .
Odezva kotvy má znatelnější vliv na režim činnosti synchronního generátoru a zejména na napětí na jeho svorkách. Míra tohoto vlivu závisí nejen na velikosti zátěže generátoru, ale také na charakteru zátěže.
Uvažujme nejprve vliv reakce kotvy synchronního generátoru pro případ, kdy je zátěž generátoru čistě aktivní. K tomuto účelu použijeme část obvodu pracovního synchronního generátoru znázorněného na obr. 2, a. Zde je znázorněna část statoru s jedním aktivním drátem na vinutí kotvy a část rotoru s několika jeho magnetickými póly.
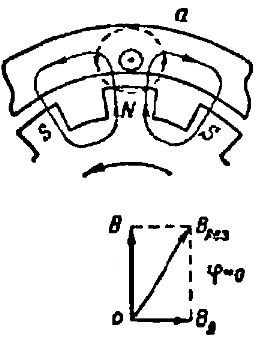
Rýže. 2. Vliv reakce kotvy při zatížení: a — aktivní, b — indukční, c — kapacitní charakter
Severní pól jednoho z elektromagnetů otáčejících se proti směru hodinových ručiček s rotorem v daném okamžiku právě prochází pod aktivním drátem vinutí statoru.
Elektromotorická síla indukovaná v tomto drátu směřuje k nám za rovinu výkresu. A protože zátěž generátoru je čistě aktivní, je proud vinutí kotvy Iz ve fázi s elektromotorickou silou. V aktivním vodiči statorového vinutí tedy proud teče směrem k nám kvůli rovině výkresu.
Magnetické siločáry vytvořené elektromagnety jsou zde znázorněny plnými čarami a magnetické siločáry vytvořené proudem drátu vinutí kotvy. - tečkovaná čára.
Níže na Obr. 2 a ukazuje vektorový diagram magnetické indukce výsledného magnetického pole umístěného nad severním pólem elektromagnetu. Zde vidíme, že magnetická indukce V hlavní magnetické pole vytvořené elektromagnetem má radiální směr a magnetická indukce VI magnetického pole proudu vinutí kotvy směřuje doprava a kolmo k vektoru V.
Výsledná magnetická indukce Řez směřuje nahoru a doprava. To znamená, že došlo k určitému zkreslení základního magnetického pole v důsledku přidání magnetických polí. Nalevo od severního pólu poněkud zeslábl a napravo se trochu zvýšil.
Je dobře vidět, že se nezměnila radiální složka výsledného vektoru magnetické indukce, na které v podstatě závisí velikost indukované elektromotorické síly generátoru. Reakce kotvy při čistě aktivním zatížení generátoru tedy neovlivňuje velikost elektromotorické síly generátoru.To znamená, že pokles napětí na generátoru s čistě aktivní zátěží je způsoben výhradně poklesem napětí na aktivním odporu generátoru, pokud zanedbáme svodovou samoindukční elektromotorickou sílu.
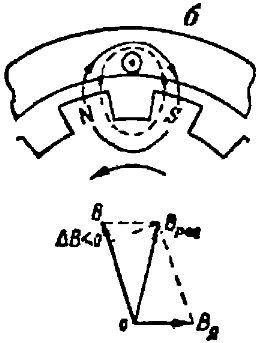
Předpokládejme nyní, že zátěž synchronního generátoru je čistě indukční. V tomto případě proud Az zaostává za elektromotorickou silou E o úhel π / 2... To znamená, že maximální proud se ve vodiči objeví o něco později než maximální elektromotorická síla. Když tedy proud v drátu vinutí kotvy dosáhne své maximální hodnoty, severní pól N již nebude pod tímto drátem, ale posune se o něco dále ve směru otáčení rotoru, jak je znázorněno na Obr. 2, b.
V tomto případě jsou magnetické čáry (tečkované čáry) magnetického toku vinutí kotvy uzavřeny přes dva sousední protilehlé póly N a S a směřují k magnetickým čarám hlavního magnetického pole generátoru vytvořeného magnetickými póly. To vede k tomu, že hlavní magnetická dráha je nejen zkreslená, ale také mírně zeslabuje.
Na Obr. 2.6 ukazuje vektorový diagram magnetických indukcí: hlavní magnetické pole B, magnetické pole v důsledku reakce kotvy Vi a výsledné magnetické pole Vres.
Zde vidíme, že radiální složka magnetické indukce výsledného magnetického pole se o hodnotu ΔV zmenšila než magnetická indukce B hlavního magnetického pole. Proto se také snižuje indukovaná elektromotorická síla, protože je způsobena radiální složkou magnetické indukce.To znamená, že napětí na svorkách generátoru, za jinak stejných podmínek, bude nižší než napětí při čistě aktivní zátěži generátoru.
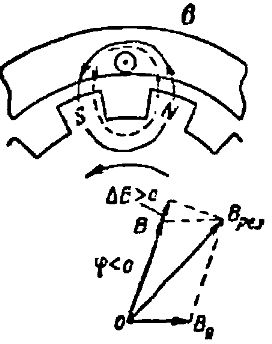
Pokud má generátor čistě kapacitní zátěž, vede v něm proud fáze elektromotorické síly o úhel π / 2... Proud ve vodičích vinutí kotvy generátoru nyní dosahuje maxima dříve než elektromotor síla E. Proto, když proud v drátu vinutí kotvy (obr. 2, c) dosáhne své maximální hodnoty, severní pól N stále tento drát nepojme.
V tomto případě jsou magnetické čáry (tečkované čáry) magnetického toku vinutí kotvy uzavřeny přes dva sousední protilehlé póly N a S a směřují podél dráhy s magnetickými čarami hlavního magnetického pole generátoru. To vede k tomu, že hlavní magnetické pole generátoru je nejen zkreslené, ale také poněkud zesílené.
Na Obr. 2, c ukazuje vektorový diagram magnetické indukce: hlavní magnetické pole V, magnetické pole v důsledku reakce kotvy Vya a výsledné magnetické pole Bres. Vidíme, že radiální složka magnetické indukce výsledného magnetického pole se stala větší než magnetická indukce B hlavního magnetického pole o hodnotu ΔB. Proto se také zvýšila indukční elektromotorická síla generátoru, což znamená, že napětí na svorkách generátoru, všechny ostatní podmínky jsou stejné, bude větší než napětí při čistě indukčním zatížení generátoru.
Po zjištění vlivu reakce kotvy na elektromotorickou sílu synchronního generátoru pro zátěže různé povahy přistoupíme k objasnění vnějších charakteristik generátoru.Vnější charakteristikou synchronního generátoru je závislost napětí U na jeho svorkách na zátěži I při konstantních otáčkách rotoru (n = konst), konstantním budícím proudu (iv = konst) a stálosti účiníku (cos φ = konst).
Na Obr. 3 jsou uvedeny vnější charakteristiky synchronního generátoru pro zátěže různé povahy. Křivka 1 vyjadřuje vnější charakteristiku při aktivním zatížení (cos φ = 1,0). V tomto případě svorkové napětí generátoru klesne, když se zátěž změní z klidové na jmenovitou v rozmezí 10 – 20 % napětí generátoru naprázdno.
Křivka 2 vyjadřuje vnější charakteristiku s odporově-indukční zátěží (cos φ = 0, osm). V tomto případě napětí na svorkách generátoru rychleji klesá vlivem demagnetizačního účinku reakce kotvy. Když se zatížení generátoru změní z chodu naprázdno na jmenovité, napětí klesne na 20 – 30 % napětí naprázdno.
Křivka 3 vyjadřuje vnější charakteristiku synchronního generátoru při aktivní kapacitní zátěži (cos φ = 0,8). V tomto případě se svorkové napětí generátoru poněkud zvýší v důsledku magnetizačního působení reakce kotvy.
Rýže. 3. Vnější charakteristiky alternátoru pro různé zátěže: 1 — aktivní, 2 — indukční, 3 kapacitní
Řídicí charakteristika synchronního generátoru
Řídicí charakteristika synchronního generátoru vyjadřuje závislost budícího proudu i v generátoru na zátěži I při konstantní efektivní hodnotě napětí na svorkách generátoru (U = const), konstantním počtu otáček rotoru. generátoru za minutu (n = konst) a stálost faktoru výkonu (cos φ = konst).
Na Obr.4 jsou uvedeny tři regulační charakteristiky synchronního generátoru. Křivka 1 se vztahuje k aktivnímu zatěžovacímu stavu (protože φ = 1).
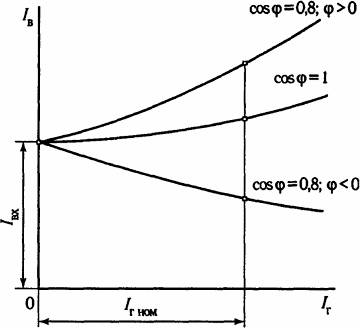
Rýže. 4. Řídicí charakteristiky alternátoru pro různé zátěže: 1 — aktivní, 2 — indukční, 3 — kapacitní
Zde vidíme, že s rostoucí zátěží I na generátoru roste budicí proud. Je to pochopitelné, protože s nárůstem zátěže I roste úbytek napětí v činném odporu vinutí kotvy generátoru a je nutné zvýšit elektromotorickou sílu E generátoru zvýšením budícího proudu iv. udržovat konstantní napětí U.
Křivka 2 se vztahuje na případ aktivní indukční zátěže při cos φ = 0,8... Tato křivka stoupá strměji než křivka 1, v důsledku demagnetizace reakce kotvy, která snižuje velikost elektromotorické síly E a tím i napětí U na svorkách generátoru.
Křivka 3 se vztahuje na případ aktivní kapacitní zátěže při cos φ = 0,8. Tato křivka ukazuje, že se zvyšujícím se zatížením generátoru je zapotřebí menší budicí proud i v generátoru pro udržení konstantního napětí na jeho svorkách. To je pochopitelné, protože v tomto případě reakce kotvy zvyšuje hlavní magnetický tok a tím přispívá ke zvýšení elektromotorické síly generátoru a napětí na jeho svorkách.