Synchronní stroje — motory, generátory a kompenzátory
 Synchronní stroje jsou elektrické stroje na střídavý proud, ve kterých se rotor a magnetické pole statorových proudů otáčejí synchronně.
Synchronní stroje jsou elektrické stroje na střídavý proud, ve kterých se rotor a magnetické pole statorových proudů otáčejí synchronně.
Třífázové synchronní generátory jsou nejvýkonnější elektrické stroje. Jednotkový výkon synchronních generátorů u vodních elektráren je 640 MW a u tepelných elektráren — 8 — 1200 MW. U synchronního stroje je jedno z vinutí připojeno ke střídavému napájení a druhé je buzeno stejnosměrným proudem. Vinutí střídavého proudu se nazývá vinutí kotvy.
Vinutí kotvy převádí veškerou elektromagnetickou energii synchronního stroje na elektrickou energii a naopak. Proto bývá umístěn na statoru, který se nazývá kotva. Budicí cívka spotřebovává 0,3 - 2 % převáděného výkonu, proto bývá umístěna na rotujícím rotoru, kterému se říká induktor a nízký budící výkon dodávají sběrací kroužky nebo bezkontaktní budicí zařízení.
 Magnetické pole kotvy se otáčí synchronní rychlostí n1 = 60f1 / p, ot./min, kde p = 1,2,3 … 64 atd. je počet pólových párů.
Magnetické pole kotvy se otáčí synchronní rychlostí n1 = 60f1 / p, ot./min, kde p = 1,2,3 … 64 atd. je počet pólových párů.
Při frekvenci průmyslové sítě f1 = 50 Hz, počet synchronních rychlostí při různém počtu pólů: 3000, 1500, 1000 atd.). Protože magnetické pole induktoru je vzhledem k rotoru stacionární, pro kontinuální interakci polí induktoru a kotvy se musí rotor otáčet stejnou synchronní rychlostí.
 Konstrukce synchronních strojů
Konstrukce synchronních strojů
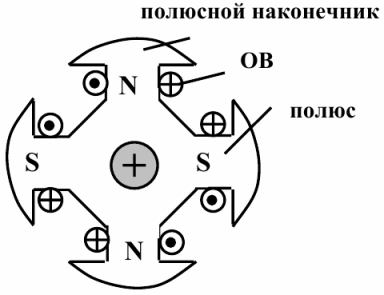
Stator synchronního stroje s třífázovým vinutím se konstrukčně neliší stator asynchronního strojea rotor s budicí cívkou je dvojího typu – prominentní pól a implicitní pól. Při vysokých rychlostech a malém počtu pólů se používají rotory s implicitními póly, protože mají odolnější konstrukci, a při nízkých rychlostech a velkém počtu pólů se používají rotory s vyčnívajícími póly modulární konstrukce. Pevnost takových rotorů je menší, ale snáze se vyrábějí a opravují. Zjevný pólový rotor:
 Používají se u synchronních strojů s velkým počtem pólů a odpovídajícím nízkým n. Vodní elektrárny (hydrogenerátory). frekvence n od 60 do několika set otáček za minutu. Nejvýkonnější hydrogenerátory mají průměr rotoru 12 m s délkou 2,5 m, p — 42 a n = 143 ot./min.
Používají se u synchronních strojů s velkým počtem pólů a odpovídajícím nízkým n. Vodní elektrárny (hydrogenerátory). frekvence n od 60 do několika set otáček za minutu. Nejvýkonnější hydrogenerátory mají průměr rotoru 12 m s délkou 2,5 m, p — 42 a n = 143 ot./min.
Nepřímý rotor:
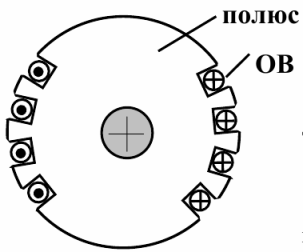 Vinutí — průměr d = 1,2 — 1,3 m v kanálech rotoru, aktivní délka rotoru není větší než 6,5 m. TPP, NPP (turbínové generátory). S = 500 000 kVA v jednom stroji n = 3000 nebo 1500 ot/min (1 nebo 2 páry pólů).
Vinutí — průměr d = 1,2 — 1,3 m v kanálech rotoru, aktivní délka rotoru není větší než 6,5 m. TPP, NPP (turbínové generátory). S = 500 000 kVA v jednom stroji n = 3000 nebo 1500 ot/min (1 nebo 2 páry pólů).
Kromě budicí cívky je na rotoru umístěn tlumič nebo tlumicí cívka, která se používá pro rozběh u synchronních motorů. Tato cívka je vyrobena podobně jako zkratovací cívka nakrátko, pouze má mnohem menší průřez, protože hlavní objem rotoru zabírá budicí cívka.U rotorů s nestejnoměrnými póly hrají roli vinutí tlumiče povrchy pevných zubů rotoru a vodivé klíny v kanálech.
Stejnosměrný proud v budícím vinutí synchronního stroje může být napájen ze speciálního stejnosměrného generátoru instalovaného na hřídeli stroje a nazývaného budič, nebo ze sítě přes polovodičový usměrňovač.  Viz také k tomuto tématu:
Viz také k tomuto tématu:
Účel a uspořádání synchronních strojů
Jak fungují synchronní turba a hydrogenerátory
Synchronní stroj může pracovat jako generátor nebo motor. Synchronní stroj může pracovat jako motor, pokud je do vinutí statoru přiváděn třífázový síťový proud. V tomto případě v důsledku vzájemného působení magnetických polí statoru a rotoru pole statoru nese rotor s sebou. V tomto případě se rotor otáčí stejným směrem a stejnou rychlostí jako pole statoru.

Nejběžnější je generátorový režim provozu synchronních strojů a téměř veškerá elektrická energie je generována synchronními generátory.Synchronní motory se používají s výkonem nad 600 kW a do 1 kW jako mikromotory. Synchronní generátory pro napětí do 1000 V se používají v jednotkách pro autonomní napájecí systémy.
Jednotky s těmito generátory mohou být stacionární i mobilní. Většina jednotek se používá s dieselovými motory, ale mohou být poháněny plynovými turbínami, elektromotory a benzínovými motory.
Synchronní motor se od synchronního generátoru liší pouze rozběhovou tlumicí cívkou, která by měla zajistit dobré startovací vlastnosti motoru.
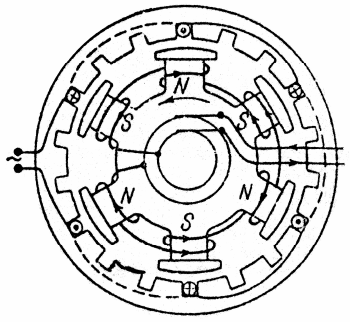
Schéma šestipólového synchronního generátoru.Jsou znázorněny průřezy vinutí jedné fáze (tři sériově zapojené vinutí). Vinutí dalších dvou fází zapadá do volných štěrbin znázorněných na obrázku. Fáze jsou zapojeny do hvězdy nebo trojúhelníku.
Režim generátoru: motor (turbína) roztáčí rotor, jehož cívka je napájena konstantním napětím? existuje proud, který vytváří trvalé magnetické pole. Magnetické pole rotuje s rotorem, protíná vinutí statoru a indukuje EMF stejné velikosti a frekvence, ale posunuté o 1200 (symetrický třífázový systém).
Režim motoru: vinutí statoru je připojeno k třífázové síti a vinutí rotoru ke zdroji stejnosměrného proudu. V důsledku interakce točivého magnetického pole stroje se stejnosměrným proudem budicí cívky vzniká moment Mvr, který pohání rotor k otáčení rychlostí magnetického pole.
Mechanická charakteristika synchronního motoru — závislost n (M) — je horizontální řez.
Vzdělávací filmový pás - „Synchronous Motors“ vyrobený továrnou na vzdělávací materiály v roce 1966.
Můžete si jej prohlédnout zde: Filmový pás «Synchronous Motor»
 Aplikace synchronních motorů Masové nasazení asynchronních motorů s výrazným nedostatečným zatížením komplikuje provoz energetických soustav a stanic: v soustavě klesá účiník, což vede k dodatečným ztrátám ve všech zařízeních a vedeních a také k jejich nedostatečnému využití v z hlediska činného výkonu. Proto se použití synchronních motorů stalo nutností, zejména u mechanismů s výkonnými pohony.
Aplikace synchronních motorů Masové nasazení asynchronních motorů s výrazným nedostatečným zatížením komplikuje provoz energetických soustav a stanic: v soustavě klesá účiník, což vede k dodatečným ztrátám ve všech zařízeních a vedeních a také k jejich nedostatečnému využití v z hlediska činného výkonu. Proto se použití synchronních motorů stalo nutností, zejména u mechanismů s výkonnými pohony.
Synchronní motory mají oproti asynchronním velkou výhodu, že díky stejnosměrnému buzení mohou pracovat s cosphi = 1 a nespotřebovávají jalový výkon ze sítě a za provozu při přebuzení dokonce dávají jalový výkon do síť. V důsledku toho se zlepšuje účiník sítě a snižuje se úbytek napětí a ztráty v ní, stejně jako účiník generátorů pracujících v elektrárnách.
Maximální točivý moment synchronního motoru je úměrný U a pro asynchronní motor U2.
Při poklesu napětí si tedy synchronní motor zachovává vyšší zatížitelnost. Využití možnosti zvýšení budícího proudu synchronních motorů navíc umožňuje zvýšit jejich spolehlivost při nouzových poklesech napětí v síti a zlepšit v těchto případech provozní podmínky elektrizační soustavy jako celku. Díky větší velikosti vzduchové mezery jsou dodatečné ztráty v oceli a v rotorové kleci u synchronních motorů menší než u asynchronních motorů, proto je účinnost synchronních motorů obvykle vyšší.
Na druhou stranu je konstrukce synchronních motorů složitější než u indukčních motorů s kotvou nakrátko a navíc synchronní motory musí mít budič nebo jiné zařízení pro napájení stejnosměrné cívky. V důsledku toho jsou synchronní motory ve většině případů dražší než asynchronní motory s kotvou nakrátko.
Při provozu synchronních motorů vznikaly značné potíže při jejich spouštění.Tyto obtíže již byly překonány.

Obtížnější je také spouštění a řízení otáček synchronních motorů. Výhoda synchronních motorů je však tak velká, že při vysokých výkonech je vhodné je použít všude tam, kde nejsou vyžadovány časté starty a dostavy a regulace otáček (motorgenerátory, výkonná čerpadla, ventilátory, kompresory, mlýny, drtiče atd.). ).
Viz také:
Typická schémata spouštění synchronních motorů
Elektromechanické vlastnosti synchronních motorů
Synchronní kompenzátory
Synchronní kompenzátory jsou navrženy tak, aby kompenzovaly účiník sítě a udržovaly normální úroveň napětí sítě v oblastech, kde se koncentruje spotřebitelská zátěž. Režim přebuzení synchronního kompenzátoru je normální, když dodává jalový výkon do sítě.
V tomto ohledu se kompenzátory, stejně jako kondenzátorové banky, které slouží stejným účelům, instalované na spotřebitelských rozvodnách, nazývají také generátory jalové energie. V obdobích snížené uživatelské zátěže (například v noci) je však často nutné použít synchronní kompenzátory a v režimu podbuzení, kdy odebírají indukční proud a jalový výkon ze sítě, protože v těchto případech má napětí sítě tendenci zvýšení a pro jeho udržení na normální úrovni je nutné zatěžovat síť indukčními proudy, které v ní způsobují další poklesy napětí.
K tomuto účelu je každý synchronní kompenzátor vybaven automatickým buzením nebo regulátorem napětí, který reguluje velikost budícího proudu tak, aby napětí na svorkách kompenzátoru zůstalo konstantní.