Nevýhody tyristorových měničů
Hlavním typem měničů stejnosměrného motoru je v současnosti polovodičový tyristor.
Nevýhody tyristorů zahrnují následující:
1. Jednostranné vedení, v důsledku čehož je nutné zdvojnásobit počet zařízení.
2. Malý proud při přetížení a také omezení rychlosti nárůstu proudu.
3. Citlivost na přepětí.

Průměrnou hodnotu usměrněného napětí při absenci regulace určuje především spínací obvod tyristorového měniče. Konverzní obvody jsou rozděleny do dvou tříd: nulový terminál a můstek. V instalacích středního a vysokého výkonu se převážně používají obvody můstkového měniče, což je způsobeno především dvěma důvody:
-
nižší napětí každého z tyristorů,
-
nepřítomnost konstantní složky proudu protékajícího vinutími transformátoru.
Obvody měničů se mohou lišit také v počtu fází: od jedné v nízkopříkonových instalacích po 12-24 u vysokovýkonných měničů.

Všechny varianty tyristorových měničů spolu s pozitivními vlastnostmi, jako je malá setrvačnost, nedostatek rotujících prvků, menší (ve srovnání s elektromechanickými měniči) velikosti, mají řadu nevýhod:
1. Pevné připojení k síti: veškeré kolísání síťového napětí se přenáší přímo do systému pohonu a zátěžové rázy na nápravách motoru se okamžitě přenášejí do sítě a způsobují proudové rázy.
2. Nízký účiník při snižování napětí.
3. Generování vyšších harmonických, zatížení elektrické sítě.
V souvislosti s unipolární vodivostí tyristorů a měniče obecně lze reverz motoru v nejjednodušším zapojení za přítomnosti jednoho měniče provést pouze spínáním kotvy nebo budicí cívky pomocí vhodných stykačů. Přirozeně za těchto podmínek nebude provoz systému elektrického stroje uspokojivý, protože je nutné spínat buď vysoké proudy, nebo obvod s velkou indukčností. Proto se obvykle používají dva měniče, z nichž každý je navržen pro práci v jednom směru otáčení.

Technické a ekonomické ukazatele tyristorového pohonu: rozsah regulace otáček, možnost jednoho či druhého způsobu brzdění, couvání, typ mechanických charakteristik a další jsou do značné míry předurčeny schématem napájení.
Celou řadu schémat hlavních (silových) obvodů lze zredukovat na čtyři hlavní možnosti:
1. Napájení kotvy stejnosměrného motoru z jednoho řízeného měniče.Toto a následující schémata pro zjednodušení výkresu a identifikaci zásadních rozdílů jsou uvedeny za předpokladu napájení z jednofázové sítě AC.
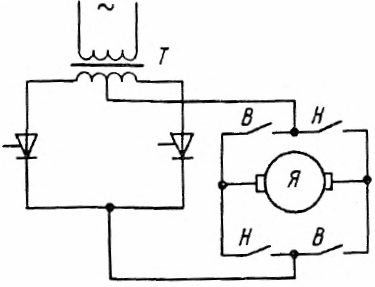
Řízený systém měnič-motor s jedním tyristorovým měničem v obvodu kotvy, V,N - stykače pro chod vpřed a vzad
Regulace otáček je v tomto případě zajištěna pouze změnou napětí přivedeného na kotvu motoru; zpětný chod motoru — změnou směru proudu kotvy pomocí stykačů. Brzdění je elektrodynamické.
Přítomnost reverzačních stykačů v obvodu kotvy instalaci prodražuje, zejména při značném výkonu motoru, a také je vhodná pouze pro mechanismy, které nevyžadují časté reverzace a zastavování. Okruh neposkytuje schopnost regenerativního brzdění.
2. Napájení kotvy motoru ze dvou měničů zapojených do křížového obvodu. V jednom směru otáčení pracuje jeden měnič, ve druhém - druhý.Opak je dosaženo řízením tyristorů a je zajištěno převedením jednoho z měničů do režimu měniče.
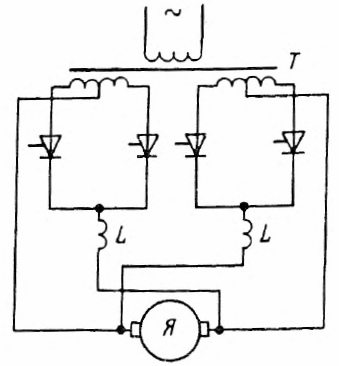 Řízený systém invertor-motor se dvěma měniči zapojenými do křížového obvodu
Řízený systém invertor-motor se dvěma měniči zapojenými do křížového obvodu
Obvod nevyžaduje objemné reverzační stykače v obvodu kotvy, poskytuje hladké a spolehlivé zastavení rekuperace energie a obecně se používá pro časté reverzace.
Nevýhodou obvodu je složitost a vysoká cena z důvodu nutnosti mít dvojitou sadu tyristorů a dvojnásobný počet sekundárních vinutí výkonového transformátoru.
3. Paralelně opačné zapojení měničů. Vlastnosti schématu jsou podobné předchozímu.Výhodou je méně sekundárních vinutí výkonového transformátoru.
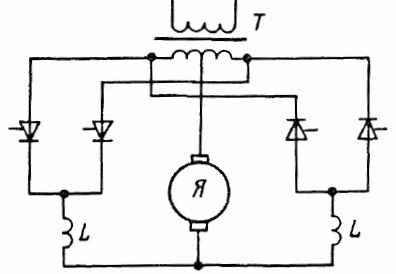
Řízený systém invertor-motor s paralelním protilehlým zapojením měničů
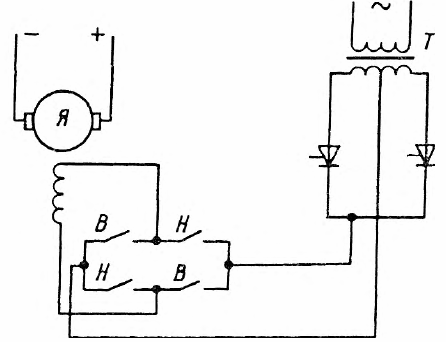
Systém měnič-motor s řízeným měničem v obvodu buzení motoru
Zařízení pracuje s konstantním a dostatečně vysokým účiníkem. Naopak změnou směru proudu v budicím obvodu přechodové děje utahuje. Systém není příliš vhodný pro mechanismy, které vyžadují velký počet reverzů a dorazů.