Výběr asynchronního elektromotoru pro provoz v režimu dynamického brzdění samobuzením
 Asynchronní elektromotor s vinutým rotorem s nejjednodušším regulačním schématem — zahrnutí odporu do obvodu rotoru má extrémně nízké regulační vlastnosti. Proto před dostupností frekvenčních měničů na trhu byla vyvinuta různá schémata pro dosažení snížené rychlosti v režimu snižování.
Asynchronní elektromotor s vinutým rotorem s nejjednodušším regulačním schématem — zahrnutí odporu do obvodu rotoru má extrémně nízké regulační vlastnosti. Proto před dostupností frekvenčních měničů na trhu byla vyvinuta různá schémata pro dosažení snížené rychlosti v režimu snižování.
Vlastně jich není tolik. V zahraničí se rozšířilo používání přídavného elektrického stroje – vírové brzdy namontované na stejné hřídeli jako hlavní motor. Schéma umožňuje získat dostatečně tuhé mechanické vlastnosti při snižování zátěže, ale takový elektrický pohon má extrémně nízké energetické charakteristiky (brzdná energie se uvolňuje ve vířivé brzdě). Kromě toho má vířivá brzda poměrně vysokou cenu a značně komplikuje uspořádání mechanické části.
Proto, aby bylo dosaženo přistávací rychlosti ve zvedacích mechanismech založených na asynchronním motoru s fázovým rotorem v závodě Dynamo na konci 70. let, konstrukční tým vedený E.M. Pevzner představil samobuzené dynamické brzdění.
Takový elektrický pohon je široce používán u domácích jeřábů (panely typu TSD, TSDI, KSDB pro mostové, portálové a portálové jeřáby, ovládací panely pro věžové jeřáby KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Hovoříme tedy o desítkách tisíc jeřábů v provozu.
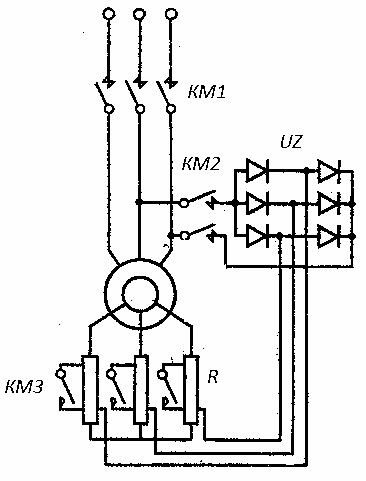
Rýže. 1. Schéma zařazení asynchronního motoru do režimu dynamického brzdění samobuzením
Princip dynamického brzdění se samobuzením je následující:
Obvod rotoru zahrnuje třífázový usměrňovač UZ (obr. 1). Elektromotor je odpojen od sítě přes stykač KM1. Usměrněné napětí je připojeno k vinutí statoru přes stykač KM2. Kontakty stykače KM3 jsou sepnuté. Po uvolnění brzdy (nezobrazeno na obrázku) se hřídel motoru začne otáčet působením padajícího závaží.
Ve vinutí rotoru se indukuje EMF, pod jehož vlivem začne v obvodu rotor-stator protékat proud. Motor vyvine brzdný moment, zátěž se spouští při konstantní rychlosti. Hodnota otáček je určena hodnotou odporu obvodu rotoru. Čím větší odpor, tím rychlejší sestup. Pro zvýšení rychlosti se stykač KM3 vypne.
V režimu dynamického brzdění s vlastním buzením spotřebovává elektrický pohon energii ze sítě pouze k napájení hydraulického tlačného zařízení brzdy a relé-stykače. Jako příklad lze uvést Obr. 7 ukazuje mechanické charakteristiky elektrického pohonu s TSD panelem.
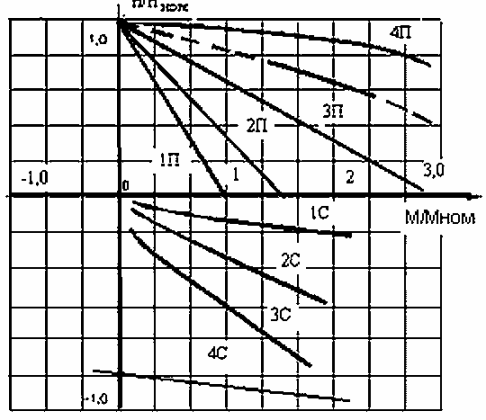
Rýže. 2. Mechanická charakteristika elektrického pohonu zvedacího mechanismu s panelem TSD
Dynamické brzdné charakteristiky jsou označeny jako 1C, 2C, 3C. Je vidět, že vlastnosti mají dostatečnou tvrdost. Nastavení rychlosti se provádí v rozsahu 1: 8, což ve většině případů postačuje pro hromadné faucety.
Podmínkou samobuzení elektromotoru je:
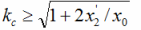
Kde x '2- indukční odpor vinutí rotoru, Ohm; хо- indukční odpor magnetizačního obvodu. om
Kde ks — koeficient schématu
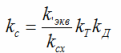
kd — koeficient redukce proudu rotoru na proud statoru; kcx — koeficient korekčního obvodu, pro třífázový můstkový obvod kx = 0,85; kt je transformační koeficient motoru ze statoru na rotor
Koeficient kd závisí na schématu zapojení statorových vinutí, která jsou u kohoutkových motorů pro domácnost připojena do hvězdy při síťovém napětí 380 V.
Koeficient kt závisí na transformačním koeficientu, tzn. poměru napětí statoru k napětí rotoru, který závisí na typu motoru. Například pro několik elektromotorů řady MT a 4MT jsou hodnoty a související parametry uvedeny v tabulce. 1.
Stůl 1.
Typ elektromotoru výkon, kWt Napětí rotoru, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 291 1,52 55 291 1,52 1,51 1,52 -6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0, 9 0,7 0,083 2,98 1
Podmínka кс ≥ √(1 + 2х '2/хо) se provádí pro motory typu MTN412-6, 4MTN225L6, které lze nazvat „vzrušené“. Takové elektromotory vstupují do režimu samobuzení bez dalšího rozhodování o obvodu. Avšak v nízkonapěťových kompletních zařízeních (nízkonapěťové rozváděče nebo ovládací panely) navržených pro spolupráci s takovými motory je pro spolehlivý provoz zajištěno malé počáteční buzení.
Počáteční buzení se provádí průchodem konstanty, tzv Malá hodnota „napájecího proudu“ (obvykle ne více než 10 % jmenovitého proudu motoru) z půlvlnného usměrňovače. U buzených motorů to v každém případě stačí pro spolehlivý přechod do režimu dynamického brzdění s vlastním buzením.
Elektromotory MTN512-6, 4MTN280M6, u kterých není splněna podmínka кс ≥ √(1 + 2х '2/хо), jsou „nebuzené“. To neznamená, že takové motory nemohou pracovat v režimu dynamického brzdění se samobuzením, ale hodnota pro ně potřebného přídavného proudu dosahuje 50 % jmenovitého proudu statoru.To vyžaduje použití speciálních NKU (ovládacích panelů) pro nebuzené elektromotory. …
Elektromotor typu 4MTN280L10 s кс = √(1 + 2х '2/хо) je na hranici samobuzení a jakákoli náhodná změna parametrů může narušit podmínku samobuzení. Proto může být takový motor také klasifikován jako nebuditelný.
Hlavním parametrem ovlivňujícím schopnost elektromotoru samobuzení je jmenovité napětí rotoru E2nom. Kritická hodnota E2nom, při které nedochází k samobuzení bez velkého napájecího proudu, by měla být brána jako 300 V.
Tuto charakteristiku režimu dynamického brzdění s vlastním buzením vzaly v úvahu závody Dynamo a Sibelektromotor PO při vývoji série jeřábových elektromotorů 4MT na počátku 80. let.
Zejména hodnota E2nom u některých elektromotorů byla ve srovnání s předchozí řadou MT snížena, aby byly motory buzené.
Například u elektromotoru 4MTN225L6, široce používaného v elektrickém pohonu věžových jeřábů, byl E2nom snížen ve srovnání s předchozím motorem řady MTN512-6 z 340 na 290 V, díky čemuž byl motor samobuzený. Později OJSC "Sibelectromotor" zahájila výrobu elektromotoru 4MTM225L6 se stejnými parametry.
Postupem času začali elektromotory s podobným určením vyrábět i jiní výrobci.
Závod Rzhevsky Crane Construction Plant vyrábí elektromotor MKAF225L6, Siberian Electrotechnical Company vyrábí elektromotor 4MTM225L6 PND.I přes vzhled odlišný od prototypu související s technologickými možnostmi každého z výrobců mají všechny tyto elektromotory stejné elektrické parametry a zástavbové rozměry a jsou zcela zaměnitelné.
Rozdíl v názvech motorů umožňuje uživateli informovaný výběr jednoho nebo druhého výrobce podle jeho vlastních preferencí, ceny, dodací lhůty atd. A zároveň si buďte naprosto jisti, že výměna elektromotoru jednoho výrobce vodovodní baterie za elektromotor jiného výrobce nepovede k poruše vodovodní baterie nebo k nehodě.
V posledním desetiletí se však na tuzemském trhu objevily elektromotory různých výrobců, jejichž značka přesně reprodukuje značku „originálního“ elektromotoru z produkce JSC „Sibelectromotor“. Dá se předpokládat, že vznik elektromotorů je spojen s velkým východním sousedem naší země. Jejich cena je o něco nižší než u tradičních výrobců, takže zájem o ně z dodávek podniků je pochopitelný.
Objednáním elektromotoru pro instalaci na vyrobený jeřáb nebo výměnou poškozeného elektromotoru na jeřábu za funkční tak můžete získat elektromotor neznámého výrobce, s E2nom odlišným od prototypového elektromotoru.
Situace trochu připomíná začátek 90. let, kdy po zemi koncertovalo několik popových skupin se stejným názvem současně.
Ještě jednou připomeňme, že poměr E2nom / I2nom je nejdůležitějším parametrem motoru s vinutým rotorem, ovlivňujícím volbu rozběhových odporů, vybavení relé-stykače a jak již bylo zmíněno výše, na podmínku samobuzení motoru. elektrický motor.
Často však na typových štítcích klonovaných motorů nejsou vůbec žádné údaje o rotoru. Zde je příklad:
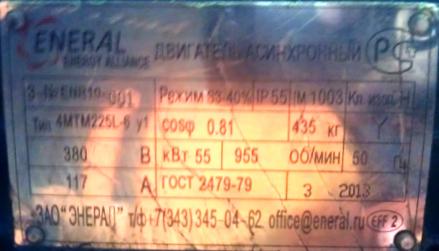
Rýže. 3. Typový štítek asynchronního motoru rotorového jeřábu
Mimochodem, tento elektromotor měl «správnou» hodnotu E2nom, jen nyní bylo nutné ji empiricky určit.
V katalozích ostatních výrobců pro elektromotor 4MTM225L6 je uvedena hodnota E2nom = 340 V, tzn. vzrušený motor se stal nevzrušeným motorem. Důsledkem použití takového elektromotoru jako součásti elektrického pohonu s dynamickým brzděním se samobuzením je pokles zatížení a oddělení elektromotoru s mechanickou destrukcí vinutí rotoru a statoru.
Právě tento obrázek autor nedávno pozoroval v jednom z nejstarších ruských strojírenských podniků, kam byl dodán nový mostový jeřáb s klonovaným elektromotorem typu 4MTM225L6 s E2n = 340 V. Jen se štěstím se lidé nedočkali trpět. Majitel jeřábu navíc po uhnutí třikrát (!) obnovuje motor.
Další výrobce klonových elektromotorů, který zřejmě opakovaně zažívá podobné nehody, nyní vyrábí dva elektromotory pod stejnou značkou (!). Jeden s E2nom = 340 V, druhý s E2nom = 264 V je v katalogu uveden s poznámkou: "pro kohoutky typu KB", tzn. věžové jeřáby.
Takový motor je skutečně nejrozšířenější na věžových jeřábech, ale je instalován i na mostových jeřábech. Můžete tak slyšet dialog mezi dodavatelem a zákazníkem: „Na jaký jeřáb potřebujete motor? Na podlahu. Pak vezměte tento (E2nom = 340 V). » A v pohonu elektrických kladkostrojů je ovládací panel se samobuzeným dynamickým brzděním. Výsledek je popsán výše.
Nikdo přitom neříká, že tyto elektromotory jsou vadné nebo nespolehlivé a nelze je použít na jeřábech. Čím více možností na trhu, tím lépe. Jak se říká, dobrých a odlišných motorů je víc. Jen jejich značka uvádí spotřebitele v omyl, což může mít nebezpečné následky.
Chcete-li použít elektromotor s parametry rotoru jinými než prototyp, musíte:
-
Změřte E2nom, když je obvod rotoru otevřený a vinutí statoru je připojeno k síti;
-
Na základě měření E2nom vypočítat, vybrat a objednat předřadné odpory;
-
Vyberte si z katalogu ovládací panel pro bezbudicí elektromotory a objednejte si ho.
Nebo se můžete jednoduše zeptat na hodnotu E2nom před objednávkou motoru, který láká svou cenou a konkrétně si to dohodnout ve smlouvě. To však nevylučuje měření E2nom při vstupním řízení objednaného motoru.
Shrneme-li výše uvedené, můžeme vyvodit následující závěry:
-
V elektrickém pohonu domácích vodovodních baterií založených na elektromotorech s fázovým rotorem se široce používá samobuzené dynamické brzdění. V provozu jsou desítky tisíc takových elektrických pohonů. Stále se vydávají.
-
Pro provoz v režimu dynamického brzdění s vlastním buzením musí mít elektromotor určitý poměr E2nom / I2nom.
-
Hlavní podmínkou pro samobuzení elektromotoru s vinutým rotorem je hodnota E2nom ≤ 300 V.
-
Použití elektromotorů s E2nom> 300 V s ovládacími panely určenými pro buzené elektromotory může způsobit pokles zátěže a zničení elektromotoru.