Regulační vlastnosti elektromotorů
 Regulovat jakoukoliv hodnotu fyzikálního procesu (jakýkoli parametr) znamená udržovat danou hodnotu na dané úrovni nebo ji měnit v souladu s daným zákonem.
Regulovat jakoukoliv hodnotu fyzikálního procesu (jakýkoli parametr) znamená udržovat danou hodnotu na dané úrovni nebo ji měnit v souladu s daným zákonem.
Jednotlivé servomotory nebo výrobní mechanismy vyžadují pro normální provoz různé rychlosti otáčení motorů servomotorů.
Například každá sekce papírenského stroje se musí otáčet přísně konstantní rychlostí bez ohledu na změny zatížení a pohon musí být schopen tuto rychlost udržet a plynule měnit rychlost každé sekce jednotlivě i celého papírenského stroje jako celku.
Rychlosti elektromotorů jsou regulovány různými způsoby. To je nutné znát pro správnou volbu hnacího motoru pro pohon. Pohony se liší v závislosti hodnot výkonu a momentu na hřídeli na velikosti otáček.
Některé mechanismy udržují konstantní hodnotu točivého momentu při změně rychlosti. Patří mezi ně např. stroje na řezání kovů… V tomto případě se výkon mění úměrně rychlosti otáčení (graficky je znázorněn přímkou na obr. 1).
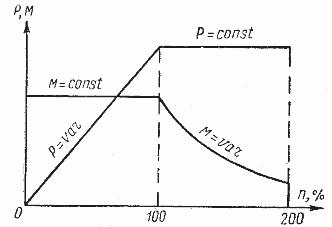
Rýže. 1. Křivky regulace otáček při konstantním výkonu a konstantním točivém momentu
Jiné mechanismy vyžadují konstantní výkon P při změně rychlosti (např zdvihací a přepravní mechanismy). V tomto případě se velikost momentu mění podle zákona o hyperbole.
Můžete sestavit grafy pomocí vzorce P = Мω10-3kWh,
kde: M je moment hřídele, N x m, ω = (2πn) / 60 — úhlová rychlost.
Na Obr. 1 ukazuje kombinované křivky, kde při změně otáček z nuly na jmenovité zůstává točivý moment konstantní. V tomto případě výkon roste podél přímky procházející počátkem. Pak s dalším zvyšováním rychlosti zůstává výkon konstantní a moment klesá podle zákona hyperboly.
Přečtěte si také: Mechanické vlastnosti elektromotorů a výrobních mechanismů