Tyristorový elektrický pohon
 V průmyslu jsou široce používány akční členy s řízenými polovodičovými ventily - tyristory. Tyristory se vyrábějí pro proudy do stovek ampér, pro napětí do 1000 voltů i více. Vyznačují se vysokou účinností, relativně malými rozměry, vysokou rychlostí a schopností pracovat v širokém rozsahu okolních teplot (od -60 do +60 °C).
V průmyslu jsou široce používány akční členy s řízenými polovodičovými ventily - tyristory. Tyristory se vyrábějí pro proudy do stovek ampér, pro napětí do 1000 voltů i více. Vyznačují se vysokou účinností, relativně malými rozměry, vysokou rychlostí a schopností pracovat v širokém rozsahu okolních teplot (od -60 do +60 °C).
Tyristor není plně řiditelné zařízení, které se zapíná přivedením odpovídajícího potenciálu na řídící elektrodu a vypíná se pouze nuceným přerušením proudového obvodu v důsledku přerušení napětí, jeho přirozeného přechodu nulou nebo napájením tlumiče. napětí opačného znaménka. Změnou časování přívodu řídicího napětí (jeho zpoždění) můžete upravit průměrnou hodnotu usměrněného napětí a tím i otáčky motoru.
Průměrnou hodnotu usměrněného napětí při absenci regulace určuje především spínací obvod tyristorového měniče. Obvody převodníků jsou rozděleny do dvou tříd: zero-pull a bridged.
V instalacích středního a vysokého výkonu se používají hlavně obvody můstkového měniče, které mají především dva důvody:
-
nižší napětí na každém z tyristorů,
-
nepřítomnost složky konstantního proudu protékající vinutím transformátoru.
Obvody měničů se mohou lišit také počtem fází: od jedné v nízkopříkonových instalacích po 12 — 24 u výkonných měničů.
Všechny varianty tyristorových měničů spolu s pozitivními vlastnostmi, jako je malá setrvačnost, nedostatek rotujících prvků, menší (ve srovnání s elektromechanickými měniči) velikostí, mají řadu nevýhod:
1. Pevné připojení k síti: veškeré kolísání napětí v síti se přenáší přímo do systému pohonu a zatížení se zvyšuje, osy motoru se okamžitě přenášejí do sítě a způsobují proudové rázy.
2. Nízký účiník při snižování napětí.
3. Generování vyšších harmonických, zatížení elektrické sítě.
Mechanická charakteristika motoru poháněného tyristorovým měničem je dána napětím přiváděným na kotvu a povahou jeho změny se zátěží, tedy vnějšími charakteristikami měniče a parametry měniče a motoru.
Zařízení a princip činnosti tyristoru
Tyristor (obr. 1, a) je čtyřvrstvý křemíkový polovodič se dvěma pn-přechody a jedním n-p-přechodem. Velikost proudu Az procházejícího tyristorem při působení anodového napětí Ua závisí na proudu Azd při průchodu řídící elektrodou při působení řídícího napětí Uy.
Pokud neexistuje žádný řídicí proud (Azy = 0), pak se zvýšením napětí U proud A v obvodu uživatele P vzroste, zůstane však velmi malá (obr. 1, b).

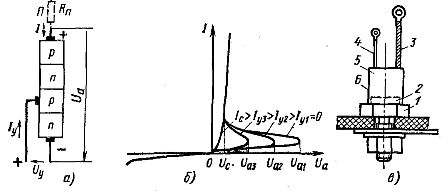
Rýže. 1. Blokové schéma (a), proudově-napěťová charakteristika (b) a konstrukce (c) tyristoru
V tomto okamžiku má n-p přechod zapnutý v nevodivém směru vysoký odpor. Při určité hodnotě Ua1 anodového napětí, nazývané otevírací, zapalovací nebo spínací napětí, dochází k lavinovému rozpadu blokovací vrstvy, jejíž odpor se zmenšuje a proudová síla se zvyšuje na hodnotu určenou v souladu s Ohmovým zákonem odporem Rp. uživatele P.
S rostoucím proudem Iу se snižuje napětí Ua. Proud Iu, při kterém napětí Ua dosáhne nejnižší hodnoty, se nazývá proud I s korekcí.
Tyristor se sepne při odpojení napětí Ua nebo při změně jeho znaménka. Jmenovitý proud I tyristoru je největší průměrná hodnota proudu tekoucího v propustném směru, která nezpůsobuje nepřijatelné přehřívání.
Jmenovité napětí Un se nazývá nejvyšší přípustné amplitudové napětí, při kterém je zajištěna daná spolehlivost zařízení.
Úbytek napětí ΔUn vytvořený jmenovitým proudem se nazývá jmenovitý úbytek napětí (obvykle ΔUn = 1 — 2 V).
Hodnota proudu Ic korekce se při napětí Uc 6 — 8 V pohybuje v mezích 0,1 — 0,4 A.
Tyristor se spolehlivě otevírá s dobou trvání pulsu 20 — 30 μs. Interval mezi impulsy by neměl být menší než 100 μs. Když napětí Ua klesne na nulu, tyristor se vypne.
Vnější provedení tyristoru je znázorněno na Obr.1, v… Měděná 1 šestnáctá křemíková čtyřvrstvá struktura 2 se závitovým koncem, se záporným výkonem 3 a ovládáním 4 výstupů. Křemíková struktura je chráněna válcovým kovovým pouzdrem 5. Izolátor je upevněn v pouzdru 6. Závit v základně 1 slouží k instalaci tyristoru a připojení zdroje anodového napětí ke kladnému pólu.
S rostoucím napětím Ua klesá řídicí proud potřebný k otevření tyristoru (viz obr. 1, b). Ovládací otevírací proud je úměrný ovládacímu otevíracímu napětí uyo.
Pokud se Uа mění podle sinusového zákona (obr. 2), pak požadované napětí a 0 otevření lze znázornit tečkovanou čarou. Pokud je přiváděné řídicí napětí Uy1 konstantní a jeho hodnota je pod minimální hodnotou napětí uuo, pak se tyristor neotevře.
Při zvýšení řídicího napětí na hodnotu Uy2 se tyristor otevře, jakmile napětí Uy2 překročí napětí uyo. Změnou hodnoty uу můžete změnit úhel otevření tyristoru v rozsahu od 0 do 90°.
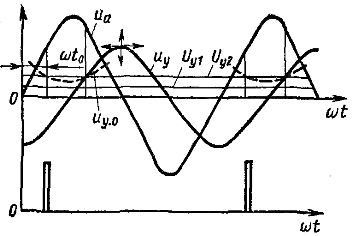
Rýže. 2. Tyristorové řízení
K otevření tyristoru v úhlech nad 90° slouží proměnné řídicí napětí uy, které se mění např. sinusově. Při napětí odpovídajícím průsečíku sinusovky tohoto napětí s tečkovanou křivkou uuo = f (ωt) se tiristor otevře.
Přesunutím sinusoidy uyo vodorovně doprava nebo doleva můžete změnit úhel otevření tyristoru ωt0. Toto ovládání úhlu otevření se nazývá horizontální. Provádí se pomocí speciálních fázových spínačů.
Přesunutím stejné sinusovky svisle nahoru nebo dolů můžete také změnit úhel otevření. Takové řízení se nazývá vertikální. V tomto případě s proměnným řízením napětí tyy přidejte algebraicky konstantní napětí, například napětí Uy1... Úhel otevření se nastavuje změnou velikosti tohoto napětí.
Po otevření zůstává tyristor otevřený až do konce kladného půlcyklu a ovládací napětí neovlivňuje jeho činnost. To také umožňuje aplikovat pulzní řízení periodickým aplikováním pozitivních řídících napěťových pulzů ve správný čas (obr. 2 dole). Tím se zvyšuje přehlednost ovládání.
Změnou úhlu otevření tyristoru tak či onak mohou být na uživatele aplikovány napěťové impulsy různých tvarů. Tím se změní hodnota průměrného napětí na svorkách uživatele.
K ovládání tyristorů se používají různá zařízení. Ve schématu na Obr. 3 je na primární vinutí transformátoru Tp1 přivedeno střídavé síťové napětí.
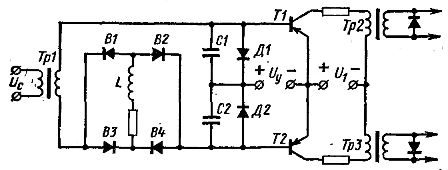
Rýže. 3. Tyristorový řídicí obvod
V sekundárním obvodu tohoto transformátoru je zařazen plnovlnný usměrňovač B.1, B2, B3, B4 s významnou indukčností L ve stejnosměrném obvodu. Praktický vlnový proud je prakticky eliminován. Ale takový stejnosměrný proud lze získat pouze celovlnným usměrněním střídavého proudu, který má tvar znázorněný na obr. 4, a.
V tomto případě je tedy usměrňovač B1, B2, B3, B4 (viz obr. 3) měničem ve formě střídavého proudu. V tomto schématu se kondenzátory C1 a C2 střídají v sérii s pravoúhlými proudovými impulsy (obr. 4, a).V tomto případě se na deskách kondenzátorů C1 a C2 (obr. 4, b) vytvoří příčné pilové napětí, přivedené na báze tranzistorů T1 a T2 (viz obr. 3).
Toto napětí se nazývá referenční napětí. Stejnosměrné napětí Uy působí také v hlavním obvodu každého tranzistoru. Když je pilové napětí nulové, vytváří napětí Uy kladné potenciály na bázích obou tranzistorů. Každý tranzistor se otevírá proudem báze při záporném potenciálu báze.
K tomu dojde, když se ukáže, že záporné hodnoty referenčního napětí pily jsou větší než Uy (obr. 4, b). Tato podmínka je splněna v závislosti na hodnotě Uy při různých hodnotách fázového úhlu. Tranzistor se v tomto případě otevírá na různé časové úseky v závislosti na velikosti napětí Uy.
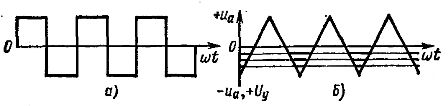
Rýže. 4. Schémata řídicích napětí tyristorů
Při otevření jednoho nebo druhého tranzistoru prochází primárním vinutím transformátoru Tr2 nebo Tr3 obdélníkový proudový impuls (viz obr. 3). Při průchodu náběžné hrany tohoto impulsu vzniká v sekundárním vinutí napěťový impuls, který je přiveden na řídicí elektrodu tyristoru.
Když zadní strana proudového impulsu prochází sekundárním vinutím, vzniká napěťový impuls opačné polarity. Tento impuls je uzavřen polovodičovou diodou, která obchází sekundární vinutí a není přivedena na tyristor.
Při ovládání tyristorů (viz obr. 3) dvěma transformátory jsou generovány dva impulsy, fázově posunuté o 180°.
Řídicí systémy tyristorových motorů
V tyristorových řídicích systémech pro stejnosměrné motory se změna stejnosměrného napětí kotvy motoru využívá k řízení jeho otáček. V těchto případech se obvykle používají vícefázová rektifikační schémata.
Na Obr. 5 a nejjednodušší schéma tohoto druhu je znázorněno plnou čarou. V tomto zapojení je každý z tyristorů T1, T2, T3 zapojen do série se sekundárním vinutím transformátoru a kotvou motoru; NS. atd. c. sekundární vinutí jsou mimo fázi. Proto jsou při řízení úhlu otevření tyristorů na kotvu motoru aplikovány napěťové impulsy, které jsou vůči sobě navzájem fázově posunuty.
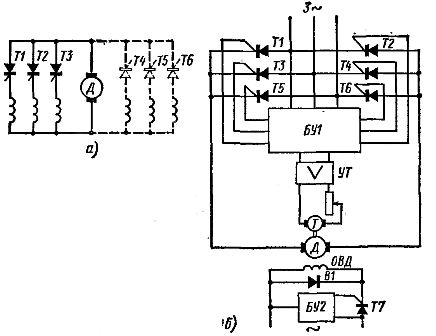
Rýže. 5. Tyristorové budicí obvody
Ve vícefázovém obvodu mohou kotvou motoru procházet přerušované a trvalé proudy v závislosti na zvoleném úhlu náběhu tyristorů. Reverzibilní elektrický pohon (obr. 5, a, celý obvod) využívá dvě sady tyristorů: T1, T2, T3 a T4, T5, T6.
Otevřením tyristorů určité skupiny mění směr proudu v kotvě elektromotoru a podle toho i směr jeho otáčení.
Reverzaci motoru lze také dosáhnout změnou směru proudu v budícím vinutí motoru. Takový zpětný chod se používá v případech, kdy není vyžadována vysoká rychlost, protože budicí vinutí má velmi vysokou indukčnost ve srovnání s vinutím kotvy. Takový zpětný zdvih se často používá u tyristorových pohonů hlavního pohybu obráběcích strojů.
Druhá sada tyristorů rovněž umožňuje provádět brzdné režimy vyžadující změnu směru proudu v kotvě elektromotoru.Tyristory v uvažovaných obvodech pohonu se používají k zapínání a vypínání motoru, jakož i k omezení rozběhových a brzdných proudů, čímž odpadá nutnost použití stykačů a také spouštěcích a brzdných reostatů.
V obvodech stejnosměrného tyristorového pohonu jsou výkonové transformátory nežádoucí.Zvětšují velikost a cenu instalace, proto často používají obvod znázorněný na Obr. 5 B.
V tomto obvodu je zapalování tyristoru řízeno řídicí jednotkou BU1. Je připojen k síti třífázového proudu, čímž zajišťuje napájení a přizpůsobuje fáze řídicích impulsů anodovému napětí tyristorů.
Tyristorový pohon obvykle využívá zpětnou vazbu otáček motoru. V tomto případě je použit tachogenerátor T a mezilehlý tranzistorový zesilovač UT. Používá se také zpětná vazba e-mailem. atd. c. elektromotor, realizovaný současným působením záporné zpětné vazby na napětí a kladné zpětné vazby na proud kotvy.
Pro nastavení budícího proudu je použit tyristor T7 s řídící jednotkou BU2. Při záporných půlcyklech anodového napětí, kdy tyristorem T7 neprochází proud, proud v OVD dále protéká v důsledku např. atd. c. samoindukce, uzavření přes obtokový ventil B1.
Tyristorové elektrické pohony s regulací šířky pulzu
U uvažovaných tyristorových pohonů je motor poháněn napěťovými impulsy o frekvenci 50 Hz. Pro zvýšení rychlosti odezvy se doporučuje zvýšit pulzní frekvenci.Toho je dosaženo u tyristorových pohonů s řízením šířky impulsů, kde kotvou motoru procházejí obdélníkové stejnosměrné impulsy různé doby trvání (zeměpisné šířky) s frekvencí až 2-5 kHz. Kromě vysokorychlostní odezvy poskytuje takové řízení velké rozsahy řízení otáček motoru a vyšší energetický výkon.
Při řízení šířky impulsů je motor napájen neřízeným usměrňovačem a tyristor zapojený do série s kotvou se periodicky zavírá a otevírá. V tomto případě stejnosměrné impulsy procházejí obvodem kotvy motoru. Změna doby trvání (zeměpisné šířky) těchto impulsů má za následek změnu rychlosti otáčení elektromotoru.
Protože v tomto případě tyristor pracuje s konstantním napětím, používají se k jeho uzavření speciální obvody. Jedno z nejjednodušších schémat řízení šířky pulzu je znázorněno na Obr. 6.
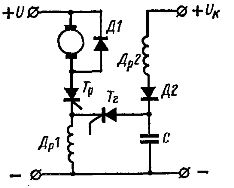
Rýže. 6. Tyristorový elektrický pohon s pulzním řízením šířky
V tomto obvodu je tyristor Tr vypnut při zapnutí tlumícího tyristoru Tr. Když se tento tyristor otevře, nabitý kondenzátor C se vybije na plynu Dr1, vytvářející významný e. atd. c. V tomto případě se na koncích tlumivky objeví napětí, které je větší než napětí U usměrňovače a směřuje k němu.
Přes usměrňovač a bočníkovou diodu D1 je toto napětí přivedeno na tyristor Tr a způsobí jeho vypnutí. Po vypnutí tyristoru se kondenzátor C opět nabije na spínací napětí Uc > U.
Díky zvýšené frekvenci proudových impulsů a setrvačnosti kotvy motoru se pulsní charakter napájení prakticky neprojevuje v plynulosti otáčení motoru. Tyristory Tr a Tr jsou otevřeny speciálním obvodem fázového posuvu, který umožňuje změnu šířky impulsu.
Elektrotechnický průmysl vyrábí různé modifikace plně regulovaných tyristorových stejnosměrných pohonů. Mezi nimi jsou pohony s rozsahy regulace rychlosti 1:20; 1:200; 1: 2000 změnou napětí, nevratné a reverzibilní pohony, s elektrickým brzděním a bez něj. Řízení se provádí pomocí tranzistorových fázově pulsních zařízení. Pohony používají negativní zpětnou vazbu na otáčky motoru a e. čítač atd. s
Výhodami tyristorových pohonů jsou vysoké energetické charakteristiky, malé rozměry a hmotnost, absence jakéhokoli točivého strojního zařízení kromě elektromotoru, vysoká rychlost a stálá připravenost k práci.Hlavní nevýhodou tyristorových pohonů je jejich stále vysoká cena, která výrazně převyšuje náklady na pohony s elektrickým strojem a magnetickými zesilovači.
V současné době existuje stálý trend k široké náhradě tyristorových stejnosměrných pohonů AC pohony s proměnnou frekvencí.