Mechanické vlastnosti elektrických pohonů
 Volba elektrického pohonu je dána požadavky pracovního stroje. Elektrický pohon musí zajistit, aby pracovní stroj vykonával zadanou technologii ve všech možných režimech: rozjezd, příjem a vyložení zátěže, zastavení, změna otáček, konstantní zátěž. Charakter těchto režimů je dán především mechanickými vlastnostmi motoru a pracovního stroje... Jedním z hlavních kritérií pro hodnocení mechanických vlastností motoru i pracovního stroje jsou jejich mechanické vlastnosti.
Volba elektrického pohonu je dána požadavky pracovního stroje. Elektrický pohon musí zajistit, aby pracovní stroj vykonával zadanou technologii ve všech možných režimech: rozjezd, příjem a vyložení zátěže, zastavení, změna otáček, konstantní zátěž. Charakter těchto režimů je dán především mechanickými vlastnostmi motoru a pracovního stroje... Jedním z hlavních kritérií pro hodnocení mechanických vlastností motoru i pracovního stroje jsou jejich mechanické vlastnosti.
Mechanické vlastnosti elektromotorů
Mechanická charakteristika elektromotoru je závislost rychlosti otáčení hřídele na momentu vyvinutém motorem ω=φ(Md) nebo n = e(Md) kde ω — úhlová rychlost otáčení hřídele, rad / sec, n — rychlost otáčení hřídele, ot./min
Mechanická charakteristika motoru se nazývá přirozená závislost n = f (M) je získána s nominálními parametry elektrické sítě, normálním schématem zapojení a bez přídavných odporů v elektrickém obvodu.
Pokud jsou přídavné odpory nebo je motor napájen ze sítě s jiným napětím nebo frekvencí než je jmenovitá, budou mechanické charakteristiky motoru nazývány umělými... Je zřejmé, že motor má nekonečné množství umělých charakteristik a pouze jeden přírodní.
Většina elektromotorů pod zatížením snižuje rychlost s rostoucím točivým momentem. Charakteristika se v tomto případě nazývá pádová... Míra změny otáček motoru se změnou točivého momentu se odhaduje pomocí tzv. tuhosti mechanických charakteristik, která je určena poměrem α = ΔM / Δω nebo α = ΔM / Δн
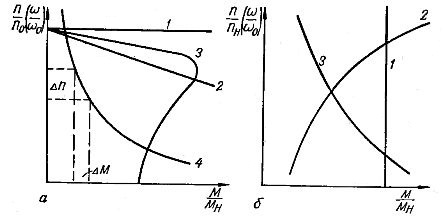
Rýže. 1. Různé typy mechanických charakteristik: a — elektromotory, b — výrobní stroje.
Hodnoty změny momentu a rychlosti poklesu při stanovení tuhosti se obvykle berou v relativních jednotkách. To umožňuje porovnat charakteristiky různých typů motorů.
V závislosti na stupni tuhosti jsou všechny mechanické charakteristiky motorů rozděleny do následujících skupin.
1. Absolutně těžký výkon s hodnotou tuhosti α = ∞… Synchronní motory mají takové mechanické vlastnosti (křivka 1, obr. 1, a) s přísně konstantní rychlostí otáčení.
2. Solidní charakteristika s relativně malým poklesem otáček s rostoucím momentem a α = 40 — 10.Do této skupiny patří přirozené charakteristiky stejnosměrných motorů s nezávislým buzením (křivka 2) a charakteristiky indukčních motorů v lineárním úseku (křivka 3).
3. Měkká mechanická charakteristika s velkým relativním poklesem otáček s rostoucím momentem a s tuhostí do α = 10. Takové charakteristiky mají stejnosměrné motory se sériovým buzením (křivka 4), nezávisle buzené motory s vysokým odporem kotvy a asynchronní motory s přídavnými odpory v okruhu rotoru.
Při provozu elektrického pohonu, aby překonal odpor pracovního stroje, musí motor vyvinout určitý moment. Proto je při výběru motoru nejprve nutné identifikovat shodu charakteristik motoru a pracovního stroje.

Mechanické vlastnosti pracovních strojů
Mechanickou charakteristikou pracovního stroje je závislost momentu statického odporu stroje na rychlosti otáčení hnacího hřídele. Pro usnadnění konstrukce kloubu je tato závislost obvykle vyjádřena stejným způsobem jako motorická charakteristika, ve tvaru ω=φ(Ms -Ms) nebo n =e(Miss).
Moment statického odporu Ms, nebo zkráceně statický moment, je moment odporu vytvářený strojem na hnací hřídeli ve statickém (stacionárním) režimu, kdy se otáčky nemění.
Mechanické charakteristiky stroje lze získat empiricky nebo výpočtem, pokud je známo rozložení statických sil nebo momentů na prvcích kinematického schématu.Statické momenty strojů mohou záviset nejen na otáčkách, ale i na dalších veličinách, proto je při praktických výpočtech elektrických pohonů nutné uvažovat každý případ zvlášť.
Statické momenty různých pracovních strojů jsou rozděleny do skupin podle charakteru jejich závislosti na rychlosti (mechanické charakteristiky). Nejběžnější v praxi jsou následující.
1. Statický moment závisí málo nebo prakticky nezávisí na rychlosti (křivka 1, obr. 2, b). Takové vlastnosti mají zvedací mechanismy, jeřáby, navijáky, kladkostroje a také pásové dopravníky při konstantním zatížení.
2. Statický moment stroje roste úměrně s druhou mocninou rychlosti (křivka 2). Tato charakteristika, charakteristická pro axiální ventilátory, se nazývá charakteristika ventilátoru a analyticky je prezentována ve formě vzorce: Mc = Mo + kn2, kde Mo je počáteční statický moment, nejčastěji způsobený třecími silami, které obvykle nejsou závisí na rychlosti, k je experimentální koeficient. Kromě ventilátorů mají charakteristiky ventilátoru odstředivá a vírová čerpadla, separátory, odstředivky, vrtule, turbodmychadla a rotační bubnové vložky.
3. Statický moment klesá s rostoucí rychlostí (křivka 3). Tato skupina zahrnuje charakteristiky některých dopravníkových mechanismů a některých strojů na řezání kovů.
4. Statický moment se mění s rychlostí nejednoznačně, s ostrým přechodem kvůli zvláštnostem technologického procesu. Charakteristiky této skupiny mají stroje, které pracují s častými velkými přetíženími, která někdy vedou k úplnému zastavení.Například nabírací mechanismus pro jednokorečkové rypadlo, hřeblový dopravník, pracující pod blokováním přepravované hmoty, drtiče a další stroje.
Kromě uvedených v praxi existují další typy mechanických charakteristik strojů, například pístová čerpadla a kompresory, jejichž statické momenty závisí na dráze.