Generátorový systém — DC motor
 Různé obráběcí stroje často vyžadují plynulou regulaci rychlosti pohonu v širším rozsahu, než je možné zajistit úpravou magnetického toku. Stejnosměrný motor s paralelním buzením… V těchto případech se používají složitější systémy elektrického pohonu.
Různé obráběcí stroje často vyžadují plynulou regulaci rychlosti pohonu v širším rozsahu, než je možné zajistit úpravou magnetického toku. Stejnosměrný motor s paralelním buzením… V těchto případech se používají složitější systémy elektrického pohonu.
Na Obr. 1 znázorňuje schéma regulovatelného elektrického pohonu podle soustavy generátor-motor (zkráceně G — D). V tomto systému indukční motor IM nepřetržitě otáčí nezávisle buzeným stejnosměrným generátorem G a budičem B, což je paralelně buzený stejnosměrný generátor s nízkým výkonem.
Stejnosměrný motor D pohání pracovní těleso stroje. Budicí vinutí generátoru OVG a motoru ATS napájí budič B. Změnou odporu budícího obvodu generátoru G reostatem 1 se změní napětí přivedené na kotvu motoru D a tím i otáčky motoru jsou regulovány. V tomto případě motor pracuje na plný a konstantní tok, protože reostat 2 je odstraněn.
Při změně napětí U se mění otáčky n0 ideální volnoběžné otáčky motoru D. Protože se tok motoru a odpor jeho obvodu kotvy nemění, strmost b zůstává konstantní. Proto jsou přímočaré mechanické charakteristiky odpovídající různým hodnotám U umístěny pod sebou a vzájemně rovnoběžné (obr. 2).
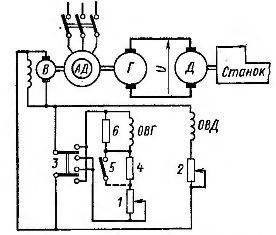
Rýže. 1. Systémový generátor – DC motor (dpt)
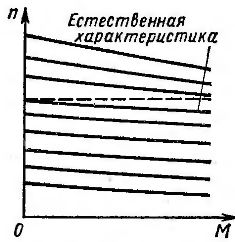
Rýže. 2. Mechanické vlastnosti generátoru — systém stejnosměrného motoru
Mají větší sklon než charakteristiky stejného elektromotoru napájeného z konstantní sítě, protože v systému G — D napětí U při konstantním budicím proudu generátoru klesá s rostoucí zátěží podle závislosti:
kde např. respektive rg — e. atd. str. a vnitřní odpor generátoru.
Analogicky s asynchronními motory označujeme
Tato hodnota charakterizuje pokles otáček motoru při zvýšení zatížení z nuly na nominální. Pro paralelní mechanické vlastnosti
Tato hodnota se zvyšuje, když n0 klesá. Při velkých hodnotách sn se budou specifikované řezné podmínky výrazně měnit s náhodnými výkyvy zatížení. Proto je rozsah regulace napětí obvykle menší než 5:1.
S klesajícím jmenovitým výkonem motorů se zvyšuje úbytek napětí na motorech a mechanické vlastnosti jsou strmější. Z tohoto důvodu se rozsah regulace napětí systému G -D s klesajícím výkonem zmenšuje (pro výkony menší než 1 kW na 3:1 nebo 2:1).
Když se magnetický tok generátoru snižuje, demagnetizační účinek reakce jeho kotvy ovlivňuje ve větší míře jeho napětí. Proto charakteristiky spojené s nízkými otáčkami motoru mají ve skutečnosti větší sklon než mechanické charakteristiky.
Rozšíření regulačního rozsahu je dosaženo snížením magnetického toku motoru D pomocí reostatu 2 (viz obr. 1), vyráběného při plném průtoku generátoru.Tento způsob regulace otáček odpovídá charakteristikám umístěným nad přirozeným jeden (viz obr. 2).
Celkový regulační rozsah, rovný součinu regulačních rozsahů obou metod, dosahuje (10 — 15): 1. Regulace napětí je řízení konstantního momentu (protože magnetický tok motoru zůstává nezměněn). Regulace změnou magnetického toku motoru D je konstantní regulace výkonu.
Před spuštěním motoru se zcela odstraní reostat D 2 (viz obr. 1) a tok motoru dosáhne nejvyšší hodnoty. Potom reostat 1 zvýší buzení generátoru G. To způsobí zvýšení napětí a zvýšení otáček motoru D. Pokud je cívka OVG okamžitě připojena k plnému napětí UB budiče B, proud v ní, stejně jako v každém obvodu s indukčností a aktivním odporem, se zvýší:
kde rv je odpor budicí cívky, LB je její indukčnost (vliv saturace magnetického obvodu zanedbejte).
Na Obr. 3 znázorňuje a (křivka 1) graf závislosti budícího proudu na čase. Budicí proud se postupně zvyšuje; míra nárůstu je určena poměrem

kde Tv je elektromagnetická časová konstanta budícího vinutí generátoru; má rozměr času.
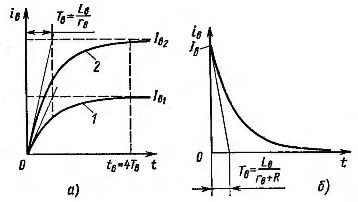
Rýže. 3. Změna budícího proudu v systému G-D
Změna napětí generátoru při rozběhu má přibližně stejný charakter jako změna budícího proudu. To umožňuje automatické spuštění motoru s odstraněným reostatem 1 (viz obr. 1).
Nárůst budícího proudu generátoru se často urychluje (vynucuje) tím, že se v počátečním okamžiku přivede na budicí vinutí napětí převyšující jmenovité napětí, pak bude proces zvyšování buzení pokračovat po křivce 2 (viz obr. 3, a). ). Když proud v cívce dosáhne Iv1, rovného ustálenému budícímu proudu při jmenovitém napětí, sníží se napětí budicí cívky na jmenovité. Doba náběhu budícího proudu na jmenovitou se zkracuje.
Pro vynucení buzení generátoru se zvolí napětí budiče V (viz obr. 1) 2-3x vyšší než jmenovité napětí budicí cívky generátoru a do obvodu se zavede přídavný rezistor 4. Obr. …
Systém generátor-motor umožňuje rekuperační brzdění. Pro zastavení je nutné, aby proud v kotvě změnil svůj směr. Točivý moment také změní znamení a místo jízdy se stane brzděním. K zastavení dochází při zvýšení magnetického toku motorového reostatu 2 nebo při poklesu napětí generátoru s reostatem 1. V obou případech, např. atd. c. E motoru je vyšší než napětí U generátoru.V tomto případě motor D pracuje v generátorovém režimu a je poháněn do rotace kinetickou energií pohybujících se hmot a generátor G pracuje v motorickém režimu, přičemž otáčí IM stroj nadsynchronní rychlostí, která se současně přepíná do režimu generátoru a dodává energii do sítě.
Rekuperační brzdění lze provést bez ovlivnění reostatů 1 a 2. Můžete jednoduše otevřít budicí obvod generátoru (např. spínač 3). V tomto případě bude proud v uzavřeném obvodu sestávajícím z budícího vinutí generátoru a rezistoru 6 postupně klesat.
kde R je odpor rezistoru 6.
Graf odpovídající této rovnici je na Obr. 3, b. Postupný pokles budícího proudu generátoru je v tomto případě ekvivalentní nárůstu odporu reostatu 1 (viz obr. 1) a způsobuje regenerativní brzdění. V tomto zapojení je rezistor 6 zapojený paralelně s budicím vinutím generátoru vybíjecí rezistor. Chrání izolaci budícího vinutí před poškozením při náhlém nouzovém přerušení budícího obvodu.
Při přerušení budícího obvodu magnetický tok stroje prudce klesá, indukuje e v závitech budicí cívky. atd. c. vlastní indukčnost je tak velká, že může způsobit porušení izolace vinutí. Vybíjecí rezistor 6 vytváří obvod, ve kterém např. atd. c. samoindukce budicí cívky indukuje proud, který zpomaluje pokles magnetického toku.
Pokles napětí na vybíjecím rezistoru se rovná napětí na budicí cívce.Čím nižší je hodnota vybíjecího odporu, tím nižší je napětí budicí cívky při přerušení obvodu. Současně s poklesem hodnoty odporu vybíjecího rezistoru se zvyšuje proud, který jím nepřetržitě protéká v normálním režimu, a ztráty v něm. Při výběru hodnoty vybíjecího odporu je třeba vzít v úvahu obě ustanovení.
Po vypnutí budícího vinutí generátoru zůstává na jeho svorkách malé napětí vlivem zbytkového magnetismu. To může způsobit, že se motor bude pomalu otáčet takzvanou plíživou rychlostí. Pro eliminaci tohoto jevu je budicí vinutí generátoru po odpojení od budiče připojeno na svorky generátoru tak, aby napětí ze zbytkového magnetismu vyvolalo demagnetizační proud v budícím vinutí generátoru.
Pro reverzaci elektromotoru D se mění směr proudu v budicí cívce generátoru OVG G pomocí spínače 3 (nebo jiného podobného zařízení). Vlivem značné indukčnosti cívky se budicí proud postupně zmenšuje, mění směr a následně postupně roste.
Procesy spouštění, zastavování a reverzace motoru v uvažovaném systému jsou vysoce ekonomické, protože se provádějí bez použití reostatů obsažených v kotvě. Motor se spouští a zpomaluje pomocí lehkého a kompaktního zařízení, které řídí pouze malé proudy pole. Proto se tento systém "generátor - stejnosměrný motor" doporučuje používat pro práci s častými starty, brzdami a reverzacemi.
Hlavní nevýhody systému motor-generátor-stejnosměrný proud jsou relativně nízká účinnost, vysoká cena a těžkopádnost v důsledku přítomnosti velkého počtu elektrických strojů v systému. Cena systému převyšuje cenu asynchronního motoru s kotvou nakrátko o stejném výkonu 8-10krát. Navíc takové elektrický pohonný systém vyžaduje hodně prostoru.