Řídicí obvody elektrického pohonu
 V závislosti na rychlosti osobních výtahů se používají následující typy obvodů řízení výkonu:
V závislosti na rychlosti osobních výtahů se používají následující typy obvodů řízení výkonu:
-
nízkorychlostní výtahy mají klec nakrátko nebo motory s fázovým rotorem a ovládání tlačítkem nebo pákou,
-
vysokorychlostní výtahy - dvou nebo jednorychlostní motory ovládané magnetickými stanicemi nebo tyristorovými řídicími stanicemi (TSU-R) s ovládacími tlačítky,
-
vysokorychlostní a vysokorychlostní výtahy - stejnosměrné motory řízené systémem "generátor - motor" s různými schématy buzení nebo systémem "tyristorový měnič - motor" s tlačítky,
-
lze použít i řetězy kaskád asynchronních ventilů (AVK), jejichž použití umožňuje zvýšit účinnost. instalace.
Osobní výtahy se v závislosti na toku cestujících, výšce zdvihu a počtu výtahů obsluhujících cestující dělí na jednoduché a skupinové ovládání.
Mezi nezadané patří:
a) výtahy fungující na jednotlivé příkazy a výzvy bez přejezdových zastávek při sestupu a výstupu cestujících,
b) výtahy s nástupem cestujících při klesání, ale se zákazem volání při stoupání,
c) stejné, ale s registrací hovorů při sestupu s jejich následným provedením.
Mezi skupinově provozované výtahy patří:
a) výtahy s jedním tlačítkem pro vyvolání přistávacích míst bez ohledu na počet nainstalovaných výtahů (častěji se používá dvojité ovládání) a s nástupem cestujících při klesání,
b) stejné, ale s kompletním sběrem cestujících v mezipatrech pro nástup a výstup (obvykle instalované v administrativních, vzdělávacích a jiných budovách).
Navíc je velmi běžné posílat výtahy do řady domů a celých čtvrtí, kdy stav okruhů je sledován z jedné dispečerské konzole a ovládáno více výtahů.
Bez ohledu na rychlost výtahů, jejich jednoduché nebo skupinové ovládání, nezbytné prvky většiny jejich schémat jsou následující:
-
samonastavovací tlačítka, nalepovací nebo zavírací tlačítka pro přivolání kabin a zadání příkazu z kabiny,
-
různé selekční senzory a přesná zastavovací zařízení pro registraci polohy kabiny a stavu elektrických obvodů,
-
senzory a blokovací zařízení pro stav zdvihacích lan, stav dveří dolu a kabin (otevřené nebo zavřené),
-
koncové spínače pro omezení rychlosti a stupně zatížení kabiny,
-
indikátory směru pohybu kabiny a u některých výtahů přítomnost nákladu v kabině.
Z těchto položek se podrobněji zastavíme u zařízení pro přizpůsobení polohy (PSC), která určují místo, kde musí důlní vůz zastavit, když dojde k zavolání nebo rozkazu, a jeho pohyb nahoru nebo dolů.Zbývající položky jsou obvykle různé modifikace koncových spínačů známé z jiných kurzů.
Konstrukčně jsou zařízení pro přizpůsobení polohy implementována ve formě sady třípolohových elektromechanických nebo indukčních nebo magnetických (jazýčkových) snímačů umístěných v dolech, se signály vystupujícími do relé nebo bezkontaktního voliče ve strojovně (někdy jsou implementovány CCP ve formě centrálních podlahových jednotek umístěných ve strojovně) …
Senzory umístěné v dole spolupracují s odbočkami namontovanými v kabině (pro elektromechanické) nebo magnetickými bočníky (pro indukční nebo jazýčkové spínače) a posílají signály do centrální podlahové jednotky (krokovací kopírka nebo reléové relé) instalované ve strojovně a druhý vysílá a řídicí obvod — signál pro provedení přijatého příkazu.
Vhodnější je umístit čidla pro signály pohybu auta nahoru nebo dolů po voze (je potřeba méně drátů) a na potřebná místa instalovat do min magnetické bočníky. V tomto případě s digitálním řízením je počet sloupců s instalovanými bočníky podél šachty roven počtu bitů přenášeného čísla podlaží v binárním nebo jiném kódu.
Třípolohové elektromechanické spínače se posunují do jedné z poloh odpovídajících pohybu kabiny nahoru nebo dolů, případně jejímu dorazu, pomocí curlingového uspořádání.V tomto případě, když je vůz v pohybu, jsou kontakty spínačů na projetých patrech zapnuty do jedné z koncových poloh, připravují se na akci řetězce volání a příkazů, a když se vůz zastaví, spínač se zapne přesunuta do střední polohy, vypne ovládací obvod od směrových stykačů a tím vyloučí vůz opustit patro při chybném stisku příkazového nebo volacího tlačítka.
Aby bylo zajištěno poměrně přesné brzdění kabiny výtahu, v poslední době se v jejich řídicích obvodech začaly používat bezdotykové indukční nebo dotykově utěsněné magneticky řízené (jazýčkové) snímače. Tyto senzory jsou instalovány jak v dole, tak v kabině: v dole jsou senzory pro výběr (zpomalení) a v kabině je senzor pro přesné zastavení. Pro rozhraní se senzory je na kokpit umístěn magnetický selektivní bočník s lucernou a v šachtě (na každém patře) jsou umístěny feromagnetické bočníky s přesným dorazem.
Indukční snímače se skládají z otevřeného magnetického obvodu ve tvaru U s cívkou uzavřenou v pouzdře. Vinutí výkonného relé je s ním zapojeno do série a je na ně přivedeno střídavé napětí (U).
Při otevřeném magnetickém obvodu je magnetický tok procházející cívkou malý. Proto e.m.f. a samoindukční proud ve vodičích cívky, stejně jako jím způsobený indukční odpor (X), prakticky chybí, takže odpor cívky je aktivní (R). Proud v sériově zapojených cívkách je poměrně velký; imituje sepnutí kontaktů v kontaktním systému (sepne relé).
Když bočník uzavře magnetický obvod ve tvaru písmene U, magnetický tok procházející jeho cívkou se zvýší a tím se zvýší emf. vlastní indukčnost a také indukční odpor cívky díky ní. V důsledku toho klesá proud v sériově zapojených cívkách, což simuluje otevření obvodu v kontaktním systému (výkonné relé je vypnuto).
Jazýčkový spínač je těleso tvaru U, ve kterém jsou na jedné straně drážky umístěny dvě utěsněné skleněné baňky s vakuem uvnitř a kontakty upevněné na pružinových deskách, které jsou připojeny k příslušným obvodům ovládání výtahu. Na druhé straně slotu je permanentní magnet. Pracovním prvkem takových snímačů je feromagnetický bočník, který prochází řezem ve tvaru U při pohybu kabiny výtahu.
Princip činnosti těchto snímačů je následující: pružinové síly kontaktních desek jazýčkových spínačů jsou směrovány tak, že pokud na ně nepůsobí pole permanentního magnetu, pak jsou normálně otevřené kontakty otevřené a normálně uzavřené kontakty jsou sepnuté, tzn. obvody, ke kterým jsou tyto kontakty připojeny, se otevřou nebo sepnou.
Tento stav jazýčkového spínače bude, když je feromagnetický bočník v drážce tělesa ve tvaru U, protože magnetické siločáry permanentního magnetu jsou uzavřeny napříč bočníkem. Jakmile bočník opustí drážku, magnetické siločáry se uzavřou napříč desky, které překonávají svou pružinovou činnost, a kontakty jazýčkového spínače, a tedy obvody, ke kterým jsou připojeny, přecházejí do opačného stavu.

Jako příklad odrážející hlavní rysy schémat ovládání výtahu uvažujme schéma ovládání pro jeden výtah bez přidružených zastávek znázorněné na Obr. 1. Výtah obsluhuje čtyři podlaží; jako výkonný motor je použit dvourychlostní asynchronní motor M.
Zařazení nízkých (Ml) nebo vysokých (B) otáček motoru se provádí odpovídajícími stykači Ml a B. Směr otáčení motoru je určen stykači B a H, zpomalení — přídavným rezistorem P, zastavení — elektromagnetickou brzdou ET.
Používá se jako podlahové spínače bezkontaktní indukční snímače (DTS, DTOV a DTON) zapojeny do série s cívkami relé (RIS, RITOV, RITON). Senzory TTP slouží k zapnutí pohonu výtahu na vysokou rychlost a dávají impuls ke zpomalení, zatímco senzory DTOV a DTON jsou určeny k přesnému zastavení výtahu v úrovni podlahy příslušného podlaží a jsou umístěny na kabině, magnetické bočníky pro ně jsou instalovány v šachtě šachty.
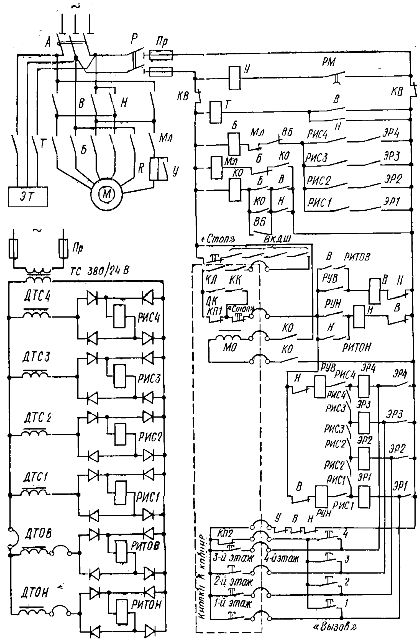
Rýže. 1. Schematické schéma ovládání jednoho výtahu
Uvažujme účel zbývajících prvků okruhu a jeho provoz na příkladu přesunu kabiny s cestujícím z 1. do 3. patra za předpokladu, že automat A, odpojovač P a koncové spínače KB omezující pohybu kabiny nahoru a dolů v nouzových režimech, jsou uzavřeny a kabina je v přízemí. V tomto případě tečou cívky relé RIS kromě relé prvního patra ze jmenovitého proudu.
Po stisku tlačítka «3. patro» se vytvoří tento elektrický obvod: fáze sítě — pól odpojovače P — pojistka Pr — koncový spínač KB — tlačítko «Stop» — zamykání důlních dvířek D1 — D4 — kontakty pro napínání lano KK — bezpečnostní koncový spínač KL — spínače kabinových dveří DK — kontakty tlačítka «Stop» — vypínací blok -kontakt Н — cívka relé RUV — zapínací kontakty relé RIS4 a RISZ (cívky těchto relé vedou proud) — cívka podlahového relé ERZ — tlačítko «3. patro» — vypínací bloky — kontakty stykačů U, B, N — koncový spínač KB — pojistka R — pól odpojovače P — fáze sítě.
Po aktivaci relé RUV a ER3 se sepnou dopředný stykač B, rychloběžný stykač B (na obvodu cívky B – blokový kontakt ML – vysokorychlostní spínač VB – kontakty relé RISZ a ER3). Při sepnutých kontaktech B a B je motor připojen k síti, stykač T, vypínací kladka a bočníkový stykač KO, který zapíná bočníkový solenoid MO a připravuje obvod cívky pomaloběžného stykače Ml zapnutý. Zdvih se zasune, uvolní zajišťovací páku a kabina se začne pohybovat.
Když se kabina přiblíží ke třetímu podlaží, feromagnetický bočník uzavře cívku snímače TTSZ, její odpor se zvýší a relé RISZ zmizí a vypne relé ER3 a RUV. Výsledkem je, že stykač B zmizí, sepne svůj kontakt, zapne pomaloběžný stykač Ml a stykač B zůstane zapnutý, protože když je vůz v pohybu, magnetický obvod přesného brzdového snímače ještě není uzavřen, takže Kontakt RITOV stále není otevřen.Motor se zastaví při nízkých otáčkách pracujících v režimu generátoru s odporem R. zavedeným do jedné fáze statoru.
Jakmile je podlaha vozu srovnaná s podlahou podlahy, magnetický bočník uzavře magnetický obvod cívky přesného dorazového snímače DTOV, relé RITOV zmizí a stykače B, pak KO a nakonec ML jsou otočeny. V důsledku toho se elektromagnet motoru a brzda odpojí od sítě, zabrzdí se mechanická brzda a kabina se zastaví.
Naučit se kolektivní schéma ovládání výtahů s průjezdnými zastávkami pouze při spouštění kabiny nebo plně kolektivní schéma, tzn. při projíždění zastávek, když se vůz pohybuje nahoru a dolů, je nutné ve schématu podobném tomu, které je uvedeno na obr. 1, zavést některé doplňky. Například v okruhu dvourychlostního motoru jsou ID indukční snímače, relé RIS a tlačítka pro volání a objednávky na každém patře, jak je znázorněno na obr. 2.
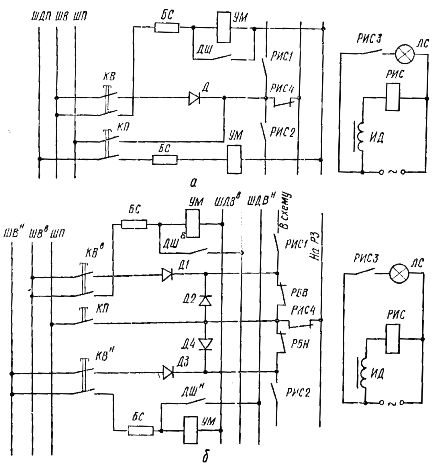
Rýže. 2. Fragmenty dodatků ke společným schématům ovládání výtahů (jedno patro)
Ve schématu s průjezdnými zastávkami při spouštění kabiny (obr. 2, a) jsou volání a příkazy vydávány samostatnými nalepovacími tlačítky, a proto je lze kdykoli zaregistrovat a okamžitě přenést do schématu, s výjimkou období pohybu kabiny. kabina s cestujícími nahoře, když je napájecí sběrnice předávacích kontaktů hovory do výkonného obvodu vypnuta selektivními kontakty z kladné sběrnice.
V kompletním schématu selektivního ovládání (obr. 2, b) jsou navíc vyzváněcí obvody pro nástupní (ШДВв) a spouštění (ШДВн) kabiny, kontakty blokovacích relé RBV a RBN jsou spojeny s kontakty výkonného obvodu selektivního sekčního obvodu. .
Ve schématech znázorněných na Obr. 1 a 2, v nepřítomnosti kabiny na podlaze jsou cívky ID indukčního snímače a relé RIS pod napětím. Když tedy stisknete příkazové tlačítko nebo zavoláte KV (jsou drženy v zapnutém stavu přídržnými magnety UM, dokud je nepřekonají kontakty důlních dvířek v tomto patře DSh), vytvoří se obvod (nikoli znázorněno na obrázcích), které zahrnuje relé ovládání nahoru RUV, pokud je cílové podlaží vyšší než podlaha parkoviště, nebo relé ovládání dolů LVL, pokud je cílové podlaží pod parkovištěm.
Po příjezdu vozu na patro hovoru se odvzdušní ID indukčního snímače, vypne se relé RIS, rozpojí se jeho kontakty, čímž se vypne relé RUV nebo RUN a kontrolka LS (vůz se zastaví) a sepnutím kontaktu RIS4 se připraví okruh pro provedení příkazu přicházejícího z vozu.
V kompletním kolektivním obvodu je obvod rozdělený kontakty RIS1 a RIS2 na podlaze parkoviště vozu přerušen nejen těmito kontakty, ale i kontakty blokovacího relé nahoru RBV nebo dolů RBN (jejich cívky nejsou ve schématu znázorněny) a zvedací, spouštěcí a řadicí obvody jsou od sebe odděleny oddělovacími diodami D1 — D4.
Před stisknutím tlačítka volání nebo objednávky, pokud ještě nebyl zvolen směr jízdy vozidla, jsou všechny kontakty v obvodu volby směru sepnuty, kromě kontaktů RIS4 na podlaze parkování.Při stisku jednoho z těchto tlačítek jsou tedy přivolávací signály z pater umístěných nad podlahou parkoviště připojeny k reléové cívce RUN a přivolávací signály z pater pod parkovištěm obsahují relé RUV. Po zvolení směru současně s relé RUV nebo LVL sepne jedno z protisměrných blokovacích relé RBV nebo RBN, které svými kontakty přeruší výstup přes sekční obvod nepřechodových volacích signálů.
Ve schématu na Obr. 2, a, aby se spustili cestující, kabina jede bez zastavení do nejvyššího patra rozhovoru a poté klesá s projíždějícími zastávkami a ve schématu na obr. 2, b, je-li nutné vyzvednout cestující, kabina jede do nejnižšího patra hovoru, poté stoupá s projíždějícími zastávkami.
V uvažovaných schématech jsou voliče vyrobeny na reléových prvcích. Spolu s tím se používají další voliče: vačkové, fotoelektrické, kontinuální sledování kartáčů, krokování, na statických prvcích atd.
Při velkých tocích cestujících je v jedné chodbě instalováno několik výtahů, které mají kombinované ovládání ve dvojicích nebo skupinách pro zvýšení pohodlí a zlepšení výkonu. Počet výtahů spojených ve skupinách obvykle nepřesahuje čtyři, ale častěji tři, i když jsou známy systémy, které obsahují až osm výtahů ve skupině.
Při skupinovém řízení jsou obvykle tři hlavní režimy provozu výtahu: vrcholové stoupání, vrcholové klesání a vyvážený pohyb v obou směrech. Aktivace výtahů pro jeden nebo druhý režim se provádí dispečerem nebo automaticky pomocí programovacích hodin instalovaných pro každou skupinu výtahů.
Ve výškových budovách je každá skupina výtahů upevněna tak, aby obsluhovala určitou plochu podlaží, jiná podlaží jím nejsou obsluhována. Pokud je ve skupině několik výtahů obsluhujících jednu oblast nebo nízkopodlažní budovu, lze za účelem zvýšení průměrné rychlosti pohybu snížením počtu zastávek přidělit samostatné výtahy pro obsluhu sudých a lichých podlaží.
Pro duální nebo skupinové ovládání výtahů musí být jejich ovládací obvody společné a volání do každého patra v obou směrech musí být registrována samostatně v každém směru vhodnými paměťovými zařízeními obsahujícími relé, tranzistory atd.
Jako příklad odrážející specifika provozu při párovém ovládání výtahů s přídavnými parkovacími relé prvního výtahu 1PC a druhého výtahu 2PC uvažujme část schematického diagramu znázorněného na Obr. 3.
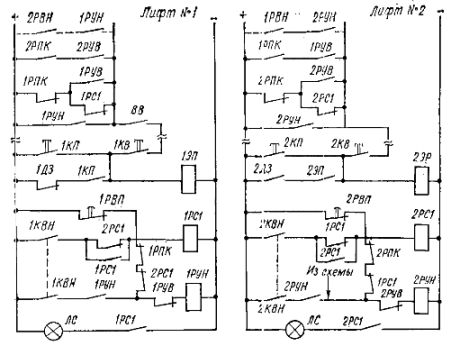
Rýže. 3. Fragment schematického nákresu párového ovládání výtahu: ER — relé podlahy, RPK — relé přepínání kanálů, relé automatického spouštění RVP
V tomto případě vůz, který sestoupil s cestujícími v prvním patře, neodpovídá na volání z jiných pater a čeká na cestující. Pokud v prvním patře není žádné auto, pak auto, které se zvedlo na příkaz a je uvolněno, je automaticky odesláno do prvního patra, a když je spuštěno nebo zaparkováno další auto, poslední zůstane na konci letu na podlaze nebo jde do nakládacího střediska a slouží k přivolání obsluhy převážně ve směru potopení.
Parkovací relé kabiny v prvním patře 1PC1 nebo 2PC1 se sepne po příjezdu kabiny v prvním patře z koncového spínače 1KVN nebo 2KVN (instalovaného v kopírovacích dolech). Tato relé jsou blokována.Zařazení jednoho z nich tedy naznačuje, že tento vůz dorazil do prvního patra dříve než druhý. V tomto případě relé 1PC1 nebo 2PC1 svým zapínacím kontaktem rozsvítí signální žárovku LS a svým rozpínacím kontaktem přeruší vyzváněcí obvod svého výtahu, čímž přeruší hovor, když je kabina zaparkována v prvním patře.
Když kabina opustí první patro, zhasne její signální kontrolka LS, okamžitě po uvolnění kabiny se obnoví napájení volaných obvodů tohoto výtahu a poté, co kabina dalšího výtahu dorazí do prvního patra, jeho počítačové relé sepne zapnuto. Tato kabina zůstává v přízemí a čeká na cestující (což je signalizováno rozsvícením výstražné kontrolky LS). Když je auto, které se zvedlo na objednávku, uvolněno a nejsou žádné hovory, je odeslán signál do obvodu, který zapne cívky relé 1RUN nebo 2RUV 1RUN nebo 2RUV přes rozpínací kontakty koncového spínače 1KVN nebo 2KVN a auto jde do prvního patra, a t .n.
Zařízení pro řízení motoru typických jednoduchých, dvojitých a skupinových řídicích výtahů je obvykle umístěno na typických panelech, stanicích nebo řídicích jednotkách instalovaných ve strojovnách.