Uspořádání dopravní linky se třemi dopravníky
 Při řízení skupiny dopravníků obsluhujících složitý technologický komplex je nutné zavést různá blokování. Při návrhu ovládacího obvodu je navíc velmi důležitá signalizace stavu mechanismů, která se nejčastěji realizuje pomocí odlehčeného mnemotechnického obvodu umístěného na ovládacím panelu operátora.
Při řízení skupiny dopravníků obsluhujících složitý technologický komplex je nutné zavést různá blokování. Při návrhu ovládacího obvodu je navíc velmi důležitá signalizace stavu mechanismů, která se nejčastěji realizuje pomocí odlehčeného mnemotechnického obvodu umístěného na ovládacím panelu operátora.
Na Obr. 1 znázorňuje dopravníkovou linku sestávající ze tří po sobě jdoucích dopravníků. Elektrický pohon pásových dopravníků zajišťují asynchronní motory s rotorem nakrátko, jejichž řídicí obvod je na stejném obrázku.
Řídicí obvod elektromotorů dopravníkové skupiny zajišťuje: nezbytnou dobu rozběhu dopravníkové linky ve směru opačném k toku zátěže. Tím se eliminuje nebezpečí ucpání místa přetížení. Proto je start každého následujícího dopravníku (ve směru proti proudu zboží) povolen až při plném zrychlení nosného tělesa předchozího dopravníku.
Toto blokování se provádí pomocí rychlostního relé, které řídí pohyb trakčního prvku; nezbytný sled zastavení dopravníkové linky ve směru toku nákladu.
Musí být zajištěno takové blokování, aby v případě nouzového zastavení jednoho z dopravníků zajistilo zastavení všech dopravníků od místa nakládky k zastavenému dopravníku a zbývající dopravníky musí pokračovat v provozu, aby se uvolnil tažný stroj. tělo ze zátěže; řízení doby spouštění pásových dopravníků.
Delší startování indikuje buď poruchu elektromotoru nebo jeho řídicího systému, nebo prokluzování řemene na hnacím bubnu, což je nepřípustné.
Řídicí obvod musí poskytovat možnost zastavení dopravníkové linky z libovolného místa, nouzové zastavení dopravníku a všech následujících ve směru rozjezdu v případě: prodloužené doby spouštění dopravníku, snížení rychlosti dopravníkového pásu, prasknutí tažného prvku, nepřijatelné překročení rychlosti pohybu tažného prvku, přetěžování elektromotoru dopravníku, přehřívání ložisek hnacích bubnů, vznik ucpání v místech přetížení, pokles dopravníkového pásu, jiskrovou bezpečnost řídicích obvodů a minimální počet jader.
V řídicím schématu průtokově-dopravního systému musí být zajištěny tyto typy signalizace: výstražná, nouzová, pro počet připojených dopravníků atd.
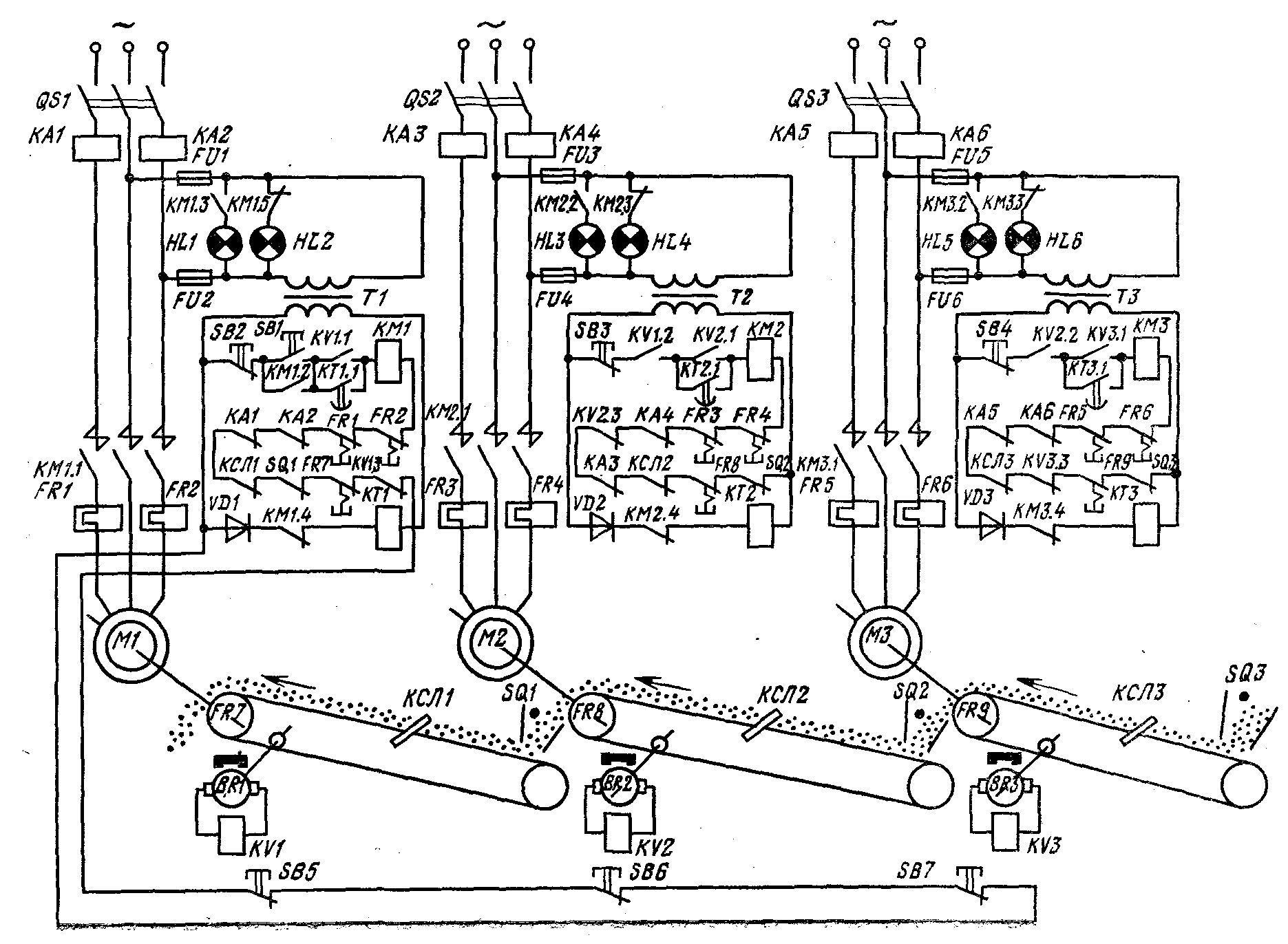
Rýže. 1. Řídicí obvod elektrického pohonu tří dopravníků (průtokový dopravní systém)
Podle výše uvedených požadavků se spuštění dopravníkové linky provádí v následujícím pořadí.Nejprve se spustí motor M1 stisknutím tlačítka SB1. Stykač KM1 současně přijímá napájení a při aktivaci sepne své linkové kontakty KM1.1 v obvodu statoru asynchronního motoru M1. Motor se začne otáčet a pohání dopravní pás.
Současně se sepnou pomocné kontakty: KM1.2, který obchází tlačítko SB1, a KM1.3, který rozsvítí signálku HL1, indikující provozní stav motoru M1. Rozpínací kontakt KM1.4 vypíná časové relé KT1, které počítá čas potřebný k akceleraci motoru na jeho maximální otáčky.
 Když je pásový dopravník v pohybu, otáčí se hřídel tachogenerátoru rychlostního relé KV1 Když pásový dopravník dosáhne své maximální rychlosti, relé KV1 dá signál k sepnutí svých kontaktů: KV1.1 v obvodu, přemostění kontaktu KT1.1 a druhý — KV1.2 v řídicím okruhu dalšího dopravníku.
Když je pásový dopravník v pohybu, otáčí se hřídel tachogenerátoru rychlostního relé KV1 Když pásový dopravník dosáhne své maximální rychlosti, relé KV1 dá signál k sepnutí svých kontaktů: KV1.1 v obvodu, přemostění kontaktu KT1.1 a druhý — KV1.2 v řídicím okruhu dalšího dopravníku.
Normální průběh startovacího procesu je řízen časovým relé KT1. Po uplynutí nastavené doby relé KT1 uvolní kotvu a způsobí rozepnutí kontaktu KT1.1 v obvodu stykače KM1. I přes rozepnutí kontaktu KT1.1 je stykač KM1 nadále napájen přes sepnutý kontakt KV1.2.
Pokud z nějakého důvodu řemen nedosáhne své maximální rychlosti během doby potřebné ke spuštění, kontakt KT1.1 se rozepne dříve, než se kontakt KV1.1 sepne, a motor M1 se zastaví, protože obvod stykače KM1 bude přerušený. .
Napnutí je způsobeno prokluzem pásu přes buben. Toto je nebezpečný režim, který může způsobit vznícení pásky. Proto obvod poskytuje blokování, které tento nebezpečný režim vypne.V případě normálního startu prvního motoru M1 je dán signál k zapnutí motoru M2 druhého dopravníku — kontakt KV1.2 se sepne. Cívka stykače KM2 protéká proudem a při aktivaci sepne své kontakty KM2.1 v obvodu statoru druhého motoru M2. Řízení startu druhého motoru se provádí ve stejném pořadí.

Ve schématech ovládání elektromotoru jsou poskytovány následující typy ochrany:
-
z přetížení motoru — tepelná relé FR1 — FR6;
-
z přehřátí ložisek hnacího bubnu — tepelná relé FR7 — FR9;
-
z překročení rychlosti dopravního pásu — rychlostní relé KV1.3 — KV3.3;
-
ze sestupného pásma — relé KSL1 — KSL3;
-
z blokování na nabíjecích bodech — přes spínače SQ1 — SQ3.
Při spuštění některého z typů ochrany se zastaví nejen dopravník, který má havárii, ale i následující proti proudu nákladu. Zbývající dopravníky ve směru toku nákladu zůstávají v provozu.
V řídicím obvodu je aplikována světelná signalizace, která ukazuje stav elektromotorů: svítí zelené kontrolky HL2, HL4, HL6 indikující deaktivovaný stav motoru, červená HL1, HL3, HL5 — pro pracovní stav. Linku dopravníku můžete zastavit z libovolného místa na dráze stisknutím jednoho z tlačítek SB5, SB6, SB7.