Snímače technologických parametrů — síla, tlak, moment
Pro realizaci automatizovaného a vysoce přesného řízení technologických procesů je nutné mít vždy k dispozici informace o aktuálních hodnotách klíčových technologických parametrů. Obvykle se k tomuto účelu používají různé snímače: síly, tlaku, krouticího momentu atd. Podívejme se na tři typy snímačů, pochopíme princip jejich činnosti.

Nejprve si všimneme, že při konstrukci snímačů síly nebo momentu se používají citlivé prvky, jejichž určité vlastnosti se mění v souladu s aktuálním stupněm deformace vyplývající z toho či onoho vnějšího vlivu.
Mohou to být elastické kovové desky, pružiny nebo hřídele, jejichž deformace se přenáší na magnetostrikční, piezoelektrický nebo polovodičový prvek, jejichž elektrické nebo magnetické parametry budou přímo záviset na stupni deformace. Bude stačit změřit tento parametr, abyste získali představu o velikosti deformace a podle toho o síle (tlak, točivý moment).
Tenzometrické tenzometry

Nejjednodušší tenzometr založený na tenzometrický drátový převodník zahrnuje mechanický elastický prvek, který je vystaven deformaci a k němu připojený tenzometr, jehož deformace se převádí přímo na elektrický signál.
Tenký (o průměru 15 až 60 mikronů) nichromový, konstantanový nebo ellinvarový drát, který je složen hadem a upevněn na filmové podložce, funguje jako tenzometrický senzor. Takový převodník je přilepen k povrchu, jehož deformace má být měřena.
Deformace mechanického elastického prvku vede k natažení nebo stlačení drátu po jeho délce, přičemž se jeho průřez zmenšuje nebo zvětšuje, což ovlivňuje změnu odporu měniče vůči elektrickému proudu.
Změřením tohoto odporu (úbytku napětí na něm) získáme představu o velikosti mechanické deformace a podle toho i o síle, za předpokladu, že jsou známy mechanické parametry deformovaného prvku.
Tlakoměrné snímače momentu

K měření silového momentu se používají citlivé elastické prvky v podobě pružin nebo tenkých hřídelí, které se při technologickém procesu zkroutí. Pružná úhlová deformace, to znamená relativní úhel začátku a konce pružiny, je měřena a převedena na elektrický signál.
Pružný prvek je obvykle uzavřen v trubici, jejíž jeden konec je nehybně pevný a druhý je připojen ke snímači úhlového posunutí, který měří úhel divergence mezi konci trubky a deformovatelným prvkem.
Tak je získán signál, který nese informaci o velikosti točivého momentu.Pro odstranění signálu z pružiny jsou vodiče prvku deformačního odporu spojeny sběracími kroužky s kartáči.
Magnetostrikční silové senzory
Existují také snímače síly s tenzometrickými magnetostrikčními převodníky. Použito zde jev inverzní magnetostrikce (Villariho efekt), který spočívá v tom, že při působení tlaku na jádro vyrobené ze slitiny železa a niklu (např. permaloid) se změní jeho magnetická permeabilita.
Podélné stlačení jádra vede k expanzi jeho hysterezní smyčky, strmost smyčky klesá, což vede ke snížení hodnoty magnetické permeability, respektive — ke snížení indukčnosti nebo vzájemné indukčnosti vinutí snímače.
Protože magnetické charakteristiky jsou nelineární a také vzhledem k tomu, že jsou výrazně ovlivněny teplotou, je nutné použít kompenzační obvod.
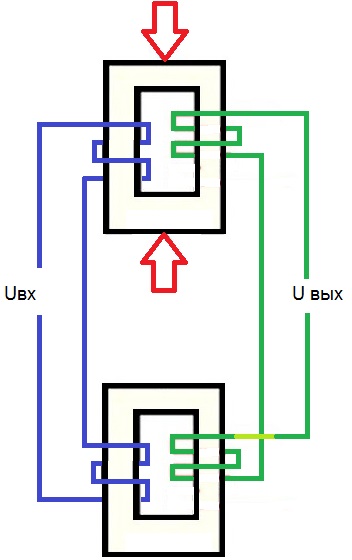
Pro odškodnění platí následující obecný systém. Uzavřené magnetostrikční magnetické jádro vyrobené z nikl-zinkového feritu je vystaveno měřitelné síle. Takové jádro nevykazuje silový tlak, ale vinutí dvou vodičů jsou navzájem spojena, takže dochází ke změně celkového EMF.
Primární vinutí jsou identická a zapojená do série, jsou napájena střídavým proudem s frekvencí do deseti kilohertzů, zatímco sekundární vinutí (také stejná) jsou zapnuta opačně a při absenci deformující síly je celkové EMF 0. Pokud se tlak na první jádro zvýšil, celkové EMF na výstupu je nenulové a úměrné deformaci.