K čemu je měkký start indukčního motoru?
 Ze všech typů motorů jsou indukční motory nejrozšířenější v průmyslu a nadále nahrazují stále více stejnosměrných motorů.
Ze všech typů motorů jsou indukční motory nejrozšířenější v průmyslu a nadále nahrazují stále více stejnosměrných motorů.
Asynchronní motory se rozšířily díky následujícím vlastnostem: nízká cena motoru, jednoduchost konstrukce, spolehlivost, vysoká účinnost. Doposud byly asynchronní motory horší než stejnosměrné motory pouze v případech, kdy je požadována plynulá regulace otáček (hoblovky, rovnačky, přestavitelné hlavní pohony válcovacích stolic apod.), v elektrické dopravě a u pohonů velkých výkonů s periodickou prací ( reverzní mlýny). Průmyslový úvod nastavitelné frekvenční měniče umožní ještě širší využití asynchronních motorů.
Nevýhody asynchronních motorů jsou:
1) Kvadratická závislost točivého momentu na napětí, s poklesem síťového napětí se výrazně sníží počáteční a kritický moment,
2) Nebezpečí přehřátí statoru, zejména při zvýšení síťového napětí, a rotoru při poklesu napětí,
3) Malá vzduchová mezera, poněkud snižující spolehlivost motoru,
4) Velké rozběhové proudy asynchronních motorů… Při spouštění indukčního motoru s rotorem nakrátko je statorový proud 5-10krát vyšší než jmenovitý. Takto vysoké proudy ve statoru jsou nepřijatelné z hlediska dynamických sil ve vinutích a ohřevu vinutí. U asynchronních motorů se mohou vyskytovat přechodné stavy s velkými zapínacími proudy, a to nejen při připojení motoru k síti, ale také při reverzaci a zpomalení.
Proč byste tedy měli omezovat zapínací proud ve vinutí statoru indukčního motoru s kotvou nakrátko?
Potřeba omezit proud motoru je dána elektrickými a mechanickými důvody. Důvody pro elektrický charakter omezení proudu motorů mohou být následující:
1) Snížení přepětí v síti. V některých případech je u velkých motorů nutné omezit zapínací proud na hodnotu povolenou napájecím systémem.
2) Redukce elektrodynamických sil ve vinutí motoru.
Snížení rázových proudů sítě je obvykle vyžadováno při spouštění velkých indukčních motorů s klecí, pokud jsou napájeny z relativně nízkého napájecího systému. U velkých motorů navíc výrobci strojů neumožňují přímé spouštění kvůli příliš velkým elektrodynamickým silám na čelech vinutí statoru a rotoru.
Důvody mechanické povahy omezování točivého momentu motorů mohou být velmi rozmanité, např. zabránění zlomení nebo rychlému opotřebení převodů, prokluzování řemenů z válečků, prokluzování kol pohyblivých vozíků, velká zrychlení nebo zpomalení, která jsou nepřijatelná pro zařízení nebo osoby v různých vozidlech atd. Někdy je potřeba snížit rozběhový moment motorů, byť malý, zmírnit rázy převodů a zajistit plynulou akceleraci.
Ve všech případech, kdy provozní podmínky nevyžadují nucené zrychlení nebo zpomalení, je vhodné vypočítat režimy pro minimální záběrný proud, potažmo krouticí moment při zachování převodu mechanismu a motoru.

Softstartér motoru
K omezení proudu se používají spouštěcí tlumivky, odpory a autotransformátory a také moderní elektronická zařízení - softstartéry (motorové softstartéry).
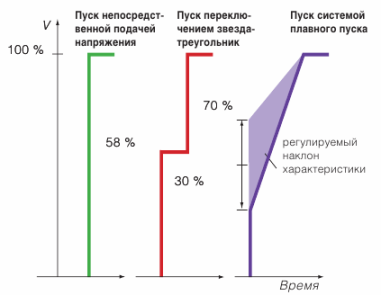
Napětí motoru
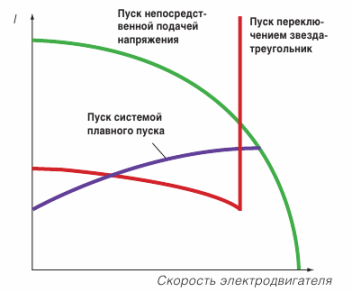
Proud motoru
Je nutné dbát na to, že omezení proudu a točivého momentu pomocí softstartérů motorů je dosaženo složitostí řídicího obvodu a zvýšením nákladů na instalaci, a proto by měl být používán pouze tam, kde je oprávněné.
Pokračování tohoto vlákna: Jak vybrat správný startér (softstartér)