Kodéry — snímače úhlu natočení
 Polohování v různých typech průmyslových zařízení je zajištěno pomocí jednoduše vypadajících zařízení — enkodérů (nebo jinými slovy úhlových snímačů).
Polohování v různých typech průmyslových zařízení je zajištěno pomocí jednoduše vypadajících zařízení — enkodérů (nebo jinými slovy úhlových snímačů).
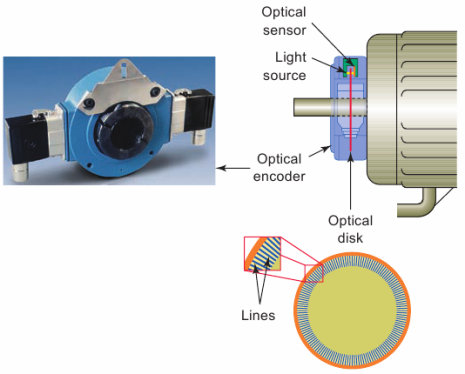
Kodéry se používají k převodu lineárního nebo rotačního pohybu na binární digitální signál. Kodér je zařízení, jehož hřídel je spojena s rotačním hřídelem studovaného objektu a zajišťuje elektronické řízení úhlu jeho natočení. Podle principu činnosti jsou kodéry rozděleny na optické a magnetické.
Na hřídeli optického kodéru je po obvodu kotouč s přerušovanými okénky, proti kterému je LED a fototranzistor, které zajišťují tvorbu výstupního signálu ve tvaru obdélníkové impulsy s frekvencí úměrnou jak počtu oken, tak rychlosti otáčení disku / hřídele. Počet pulzů udává úhel natočení.
Optické snímače jsou k dispozici jako inkrementální a absolutní snímače.
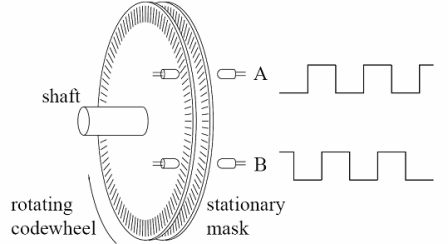
Inkrementální kodéry mají přerušovaný disk s mnoha okny stejné velikosti jako základní poloměr a dvěma čteními optočleny, který umožňuje zafixovat jak úhel natočení, tak i směr otáčení hřídele.Na extra poloměru disku je jediné okénko přerušení a odpovídající optočlen, které definují výchozí pozici (domov).
Negativní krouticí moment - Inkrementální enkodéry poskytují relativní čtení úhlu natočení, o kterém se při zastavení rotace neukládá. Mezi jejich výhody patří jednoduchost konstrukce (a tedy nízká cena) při vysokém rozlišení a vysoké pracovní frekvenci.
Inkrementální snímače se zvýšenou odolností jsou zaměřeny na průmyslové aplikace - ve strojírenství, válcovnách, stavbě lodí, textilu, obuvi, dřevozpracujícím průmyslu. U takovýchto kodérů jsou rozhodující parametry rozlišení v úhlu natočení, schopnost pracovat na vysokých frekvencích, vysoký stupeň ochrany, aby obstály v podmínkách drsného prostředí.
Disk s čarami nebo zářezy, které přerušují světelný paprsek k optickému senzoru. Elektronický obvod snímá přerušení paprsku a generuje digitální výstupní impulsy z kodéru.
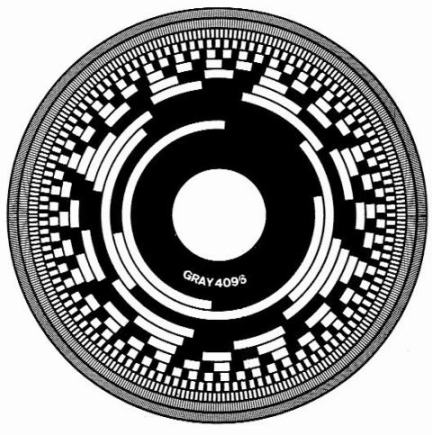
Kódovací disk — zařízení pro převod úhlových posuvů hřídele do digitální podoby. Na kódovací disk je aplikován geometrický obraz digitálního kódu. Symboly kódových bitů jsou aplikovány na soustřednou stopu a nejméně významné (méně významné) bity jsou umístěny blíže k periferii.
V závislosti na způsobu čtení kódu (kontaktní, fotoelektrické, elektromagnetické, indukční, elektrostatické atd.) se geometrický obraz kódu skládá z elektricky vodivého a elektricky izolovaného, průhledného a neprůhledného, magnetického a nemagnetického atd.
Nejrozšířenější byly kódovací disky s varietami binárního kódu, které vylučují výskyt chyb při překračování hranic samostatných diskrétních sekcí, kdy některé bity lze číst na jedné straně hranice a některé na druhé (kvůli nepřesné instalaci výměnných zařízení nebo z důvodu nesoučasného čtení kódu při otáčení disku Mezi tyto kódy patří tzv. Fau kód (Barkerův kód) a Reflexní kód (Greyův kód).
Některé optické rotační kodéry používají reflexní kodérový disk. Tento disk má střídavé sekce, které absorbují nebo odrážejí světlo, a zdroj světla spolu s přijímačem jsou umístěny na jedné straně disku. Pokud je k dispozici pouze jeden světelný zdroj a přijímač, sekvence impulsů ze snímače vám umožní zjistit, o kolik kroků se disk otočil vzhledem ke své předchozí poloze.
Senzor nedokáže určit směr otáčení, ale pokud přidáte druhý pár zdroj-přijímač, 90 mimo fázi od prvního, pak bude mikrokontrolér schopen určit směr otáčení disku podle fázového rozdílu mezi pulzní vlaky.
Je třeba mít na paměti, že každý systém, který detekuje relativní natočení disku, ale nedokáže změřit jeho absolutní úhlovou polohu, je inkrementální kodér.
Absolutní kodér má nespojitý disk se soustřednými okny různých poloměrů, jejichž relativní velikosti jsou určeny binárním kódem a které jsou čteny současně, přičemž pro každou úhlovou polohu dává kódovaný výstupní signál (Grayův kód, binární kód...).
V tomto případě je možné získat údaje o okamžité poloze hřídele bez digitálního počítadla nebo se vrátit do výchozí polohy, protože výstup má kódované slovo — «n bit», chráněné před elektrickým šumem.
Absolutní kodéry se používají v aplikacích, které vyžadují uložení vstupních dat na dlouhou dobu, jsou však designově složitější a dražší.
Absolutní enkodéry s rozhraním fieldbus mají výstupní rozhraní pro komunikaci fieldbus v souladu se standardy CANopen, ProfiBus, DeviceNet, Ethernet, InterBus a používají binární kód pro určení úhlu natočení. Výše uvedená komunikační rozhraní jsou programovatelná podle řady parametrů: např. směr otáčení, rozlišení pulzů na otáčku, přenosová rychlost.

Snímače namontované na hřídeli motoru účinně zajišťují přesné polohování. Takové enkodéry se obvykle vyrábějí v provedení «otvor» a důležitými prvky jejich konstrukce jsou speciální spojky, které umožňují kompenzovat vůli hřídele motoru.
Polohování za výše uvedených podmínek nejúčinněji poskytuje magnetický kodér, ve kterém je převod úhlového posunutí hřídele na elektronický signál prováděn bezkontaktně na základě Hallova jevu, nesouvisí s rotací optického chopperu uvnitř snímač a umožňuje zpracování signálu rychlostí až 60 000 ot./min.
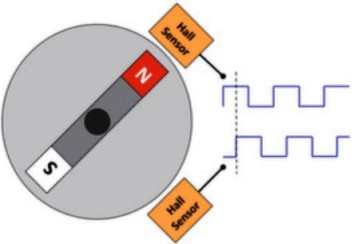
U magnetického kodéru je vysokorychlostní rotace vnější hřídele, na které je upevněn permanentní válcový magnet, snímána Hallovým senzorem kombinovaným na jediném polovodičovém krystalu s regulátorem zpracování signálu.
Když se póly permanentního magnetu otáčí přes mikroobvod s Hallův senzor proměnný vektor magnetické indukce indukuje Hallovo napětí, které obsahuje informaci o okamžité hodnotě úhlu natočení hřídele. Mikrokontrolér poskytuje rychlou konverzi Hallova napětí na parametr polohovacího úhlu.

Možnost takové konverze bez přímého mechanického spojení magnetu a prvků Hallova snímače je hlavní výhodou magnetických snímačů, poskytuje jim vysokou spolehlivost a odolnost a umožňuje jim efektivně pracovat ve vysokorychlostních aplikacích souvisejících s průmyslovou automatizací, tiskem, kovoobráběním. , měřící a měřicí technika.