Mechanické vlastnosti elektromotorů a výrobních mechanismů
 Při návrhu elektrického pohonu je třeba zvolit elektromotor tak, aby jeho mechanické vlastnosti odpovídaly mechanickým vlastnostem výrobního mechanismu. Mechanické charakteristiky udávají vztah proměnných v ustáleném stavu.
Při návrhu elektrického pohonu je třeba zvolit elektromotor tak, aby jeho mechanické vlastnosti odpovídaly mechanickým vlastnostem výrobního mechanismu. Mechanické charakteristiky udávají vztah proměnných v ustáleném stavu.
Mechanická charakteristika mechanismu se nazývá vztah mezi úhlovou rychlostí a momentem odporu mechanismu, redukovaného na hřídel motoru) ω = f (Mc).
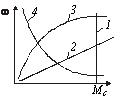
Rýže. 1. Mechanické vlastnosti mechanismů
Mezi všemi odrůdami existuje několik charakteristických typů mechanických vlastností mechanismů:
1. Charakteristika s momentem odporu nezávislým na rychlosti (přímka 1 na obr. 1). Mechanická charakteristika nezávislá na rychlosti je nakreslena jako přímka rovnoběžná s osou otáčení, v tomto případě vertikální. Takovou charakteristiku mají například jeřáby, navijáky, pístová čerpadla s konstantní dopravní výškou atd.
2.Charakteristika s momentem odporu lineárně závislým na otáčkách (řádek 2 na obr. 1). Tato závislost je vlastní například pohonu nezávisle buzeného stejnosměrného generátoru pracujícího při konstantní zátěži.
3. Charakteristické s nelineárním nárůstem točivého momentu (křivka 3 na obr. 1). Typickými příklady jsou provoz ventilátorů, odstředivých čerpadel, vrtulí. U těchto mechanismů závisí moment Mc na druhé mocnině úhlové rychlosti ω... Jedná se o tzv. parabolická (ventilátorová) mechanická charakteristika.
4. Charakteristika s nelineárně klesajícím momentem odporu (křivka 4 na obr. 1). Zde je moment odporu nepřímo úměrný rychlosti otáčení. V tomto případě zůstává výkon konstantní v celém rozsahu provozních otáček mechanismu. Například v mechanismech hlavního pohybu některých obráběcích strojů (soustružení, frézování, vrtání) se moment Mc mění nepřímo úměrně ω a výkon spotřebovaný mechanismem zůstává konstantní.
Mechanická charakteristika elektromotoru se nazývá závislost jeho úhlové rychlosti na kroutícím momentu ωd = f (M). Zde je třeba mít na paměti, že moment M na hřídeli motoru, bez ohledu na směr otáčení, má kladné znaménko — moment pohybu. Přitom moment odporu Mc má záporné znaménko.
Jako příklady, Obr. 2 ukazuje mechanické charakteristiky: 1 — synchronní motor; 2 — DC motor s nezávislým buzením; 3 — Stejnosměrný motor se sériovým buzením.
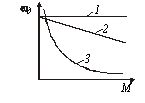 Rýže. 2. Mechanické vlastnosti elektromotorů
Rýže. 2. Mechanické vlastnosti elektromotorů
Pro hodnocení vlastností mechanických charakteristik elektrického pohonu se používá pojem charakteristická tuhost.Tuhost mechanické charakteristiky je určena výrazem
p = dM/dco
kde dM — změna točivého momentu motoru; dωd — odpovídající změna úhlové rychlosti.
Pro lineární charakteristiky zůstává hodnota β konstantní, pro nelineární závisí na pracovním bodu.
Pomocí tohoto konceptu jsou vlastnosti zobrazené na Obr. 2, lze kvalitativně hodnotit takto: 1 — absolutně rigidní (β = ∞); 2 — pevné; 3 — měkký.
Absolutně obtížná charakteristika — otáčky motoru zůstávají nezměněny, když se zatížení motoru změní z nuly na nominální. Synchronní motory mají tuto vlastnost.
Tuhá charakteristika — rychlost otáčení se mění jen málo, když se zatížení mění z nuly na nominální. Tuto charakteristiku má jak paralelně buzený stejnosměrný motor, tak i indukční motor v oblasti lineární části charakteristiky.
Za tuhou charakteristiku se považuje taková, u které změna otáček nepřesáhne přibližně 10 % jmenovitých otáček při změně zatížení z nuly na jmenovitou.
Měkká charakteristika — otáčky motoru se výrazně mění s relativně malými změnami zatížení. Tuto charakteristiku má stejnosměrný motor se sériovým, smíšeným nebo paralelním buzením, ale s přídavným odporem v obvodu kotvy, stejně jako asynchronní s odporem v obvodu rotoru.
Pro většinu výrobních mechanismů se používají asynchronní motory s kotvou nakrátko, které mají tuhé mechanické vlastnosti.
Všechny mechanické vlastnosti elektromotorů jsou rozděleny na přirozené a umělé.
Přirozené mechanické vlastnosti se vztahují k provozním podmínkám motoru s nominálními hodnotami parametrů.
Například pro motor s paralelním buzením lze vykreslit přirozenou charakteristiku pro případ, kdy napětí kotvy a budicí proud mají jmenovité hodnoty a v obvodu kotvy není žádný přídavný odpor.
Přirozená charakteristika indukčního motoru odpovídá jmenovitému napětí a jmenovité frekvenci střídavého proudu přiváděného do statoru motoru za předpokladu, že v obvodu rotoru není přídavný odpor.
Pro každý motor lze tedy postavit pouze jednu přirozenou charakteristiku a neomezený počet umělých. Například každá nová hodnota odporu kotvy stejnosměrného motoru nebo v obvodu rotoru indukčního motoru má své vlastní mechanické vlastnosti.
