Klasifikace systémů automatického řízení

Soubor automatického řídicího zařízení a řídicího objektu, které jsou propojeny a vzájemně na sebe působí v souladu s řídicím algoritmem, se nazývá automatický řídicí systém (ACS).
Automatické řídicí systémy lze klasifikovat podle způsobu řízení a funkčních charakteristik. Podle způsobu řízení jsou všechny systémy rozděleny do dvou velkých tříd: běžné (nesamoregulační) a samoregulační (adaptivní).
Běžné systémy spadající do kategorie jednoduchých nemění v průběhu řízení svou strukturu. Jsou nejrozvinutější a nejrozšířenější ve slévárnách a tepelných dílnách. Běžné automatické řídicí systémy jsou rozděleny do tří podtříd: otevřené, uzavřené a kombinované řídicí systémy.
Automatické řídicí systémy s otevřenou smyčkou se zase dělí na automatické rigidní řídicí systémy (SZHU) a poruchové řídicí systémy.
V prvních systémech regulátor působí na regulační objekt bez ohledu na získaný výsledek, tedy hodnotu regulované veličiny a vnější poruchu. Poruchové řídicí systémy pracují na principu, že řídicí akce je generována v závislosti na vnějších poruchách, které ovlivňují řídicí objekt.
Jako příklad uveďme topný systém slévárny nebo tepelné dílny. V tomto případě je spotřeba teplé vody v topném potrubí prodejny závislá na vnějších povětrnostních podmínkách. Čím je venku chladněji, tím více teplé vody se přivádí do radiátorů a naopak.
Uzavřené automatické řídicí systémy pracující na principu výchylky se také nazývají automatické řídicí systémy (ACS). Jejich charakteristickým znakem je přítomnost uzavřeného cyklu průchodu signálu, tedy přítomnost zpětného kanálu, kterým se informace o stavu řízené veličiny přenáší na vstup porovnávacího prvku.
Automatické řídicí systémy jsou určeny k řešení tří problémů: stabilizace řízené hodnoty (stabilizační ATS), změna řízené hodnoty podle známých (naprogramovaných ATS) nebo neznámých (sledování ATS) programů.
Při stabilizaci ATS je žádaná hodnota regulované veličiny konstantní. Příkladem takového systému je systém regulace teploty v pracovním prostoru tepelné pece. V softwaru ATS se hodnota řízené veličiny v čase mění podle předem navrženého (známého) programu.
V servosystémech se nastavená hodnota regulované veličiny v čase mění podle dříve neznámého programu.Sledovací a softwarové ATS se od stabilizátorů liší principem zpracování referenčního signálu.
Nejtypičtějším příkladem servořízení je automatické udržování daného poměru mezi spotřebou paliva a vzduchu při regulaci spalovacího procesu v topeništích na tavení a ohřev paliva.
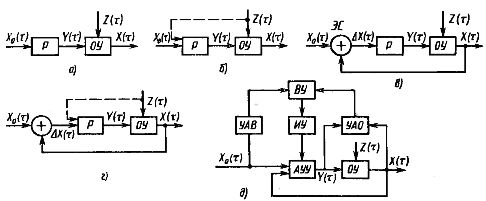
Automatické řídicí systémy: a — otevřené, b — předpětí otevřené, c — zavřené, d — kombinované, d — samoregulační, P — regulátor, OU — řídicí objekt, ES — srovnávací prvek, UAV — zařízení pro analýzu regulační činnosti : VU — výpočetní zařízení, IU je výkonné zařízení, AUU je automatické řídicí zařízení, AUO je zařízení pro analýzu řídicích objektů.
Kombinované systémy spojují výhody systémů regulace odchylek a poruch, což zvyšuje přesnost regulace. Účinek nevysvětlitelných poruch v kombinovaných systémech je kompenzován nebo tlumen řízením zkreslení.
Samoregulační (adaptivní) systémy lze rozdělit do tří podtříd: extrémní systémy, samoladící systémy a samoladící systémy.
Extrémní regulační systémy se nazývají stabilizační, sledovací nebo programované řídicí systémy, ve kterých se nastavení, program nebo reprodukční zákon automaticky mění v závislosti na změnách vnějších podmínek nebo vnitřního stavu systému tak, aby se vytvořil nejpříznivější (optimální) režim provozu. kontrolní objekt.
V takových systémech je místo trvalého nastavení nebo programu instalováno automatické vyhledávací zařízení, které analyzuje každou charakteristiku objektu (efektivita, produktivita, hospodárnost atd.) a v závislosti na získaném výsledku dodá požadovanou hodnotu regulované veličiny k regulačnímu zařízení, takže tato charakteristika má vynikající hodnotu s plynulou změnou různých rušivých vlivů, které ovlivňují provozní podmínky systému.
V systémech se samočinným nastavením parametrů dochází při změně vnějších podmínek nebo charakteristik řízeného objektu k automatické (nikoli podle předem stanoveného programu) změně proměnných parametrů řídicího zařízení, aby byl zajištěn stabilní provoz systému a udržován regulovaná hodnota na dané nebo optimální úrovni.
V systémech se samonastavitelnou strukturou se při změně vnějších podmínek a charakteristik řídicího objektu přepínají prvky ve schématu zapojení nebo se do něj zavádějí nové prvky. Účelem těchto změn (volby) struktury je dosáhnout lepšího řešení problému řízení.
Výběr struktury se provádí automatickým vyhledáváním pomocí výpočetních a logických operací. Takové systémy se musí nejen přizpůsobit všem změnám vnějších podmínek a charakteristik objektu, ale také normálně fungovat i při poruchách nebo poškození jednotlivých prvků, vytvářet nové obvody, které nahrazují ty přerušené. Samoregulační systémy lze vytvořit tak, aby se zlepšovaly, „získaly zkušenosti“ rychlým vyzkoušením několika možností, výběrem a „zapamatováním“ té nejlepší.
Funkční klasifikace všechny automatické řídicí systémy jsou rozděleny do čtyř tříd:
-
systémy pro koordinaci práce mechanismů,
-
systémy pro regulaci parametrů technologických procesů,
-
automatické řídicí systémy,
-
automatické ochranné a blokovací systémy.

Systémy určené pro koordinaci činnosti jednotlivých mechanismů závodu nebo závodu jako celku automatické tuhé řídicí systémy (SZHU).
Technologické procesy automatických řídicích systémů (ASS) zajišťují udržení řízené hodnoty na dané úrovni nebo její změnu podle daného programu.
Automatické řídicí systémy (ACS) obsahují prostředky a metody pro získávání informací o aktuálních hodnotách parametrů technologického procesu (teplota, tlak, prašnost nebo obsah plynů ve vzduchu atd.) bez přímého zásahu člověka.
Automatické ochranné systémy (SAZ) a blokovací systémy (SAB) zabraňují vzniku havarijních situací při provozu zařízení ve stabilním stavu.