Výkonné stejnosměrné motory a tachogenerátory
DC výkonné motory
 Stejnosměrné servopohony jsou stroje s nízkým výkonem používané v automatizaci a telemechanice, v automatických řídicích, regulačních a řídicích systémech automatizovaných instalací, kde převádějí elektrický signál měřicího zařízení – řídicí napětí – na úhlový pohyb hřídele k ovlivnění řídicích, regulačních nebo řídicích přístrojů... V případech, kdy vstupní signál nestačí k pohonu hnacího motoru, se používá magnetický nebo polovodičový výkonový zesilovač.
Stejnosměrné servopohony jsou stroje s nízkým výkonem používané v automatizaci a telemechanice, v automatických řídicích, regulačních a řídicích systémech automatizovaných instalací, kde převádějí elektrický signál měřicího zařízení – řídicí napětí – na úhlový pohyb hřídele k ovlivnění řídicích, regulačních nebo řídicích přístrojů... V případech, kdy vstupní signál nestačí k pohonu hnacího motoru, se používá magnetický nebo polovodičový výkonový zesilovač.
Hnací motory obvykle pracují s častými starty, zastaveními a zpětným chodem. Vyznačují se významným rozběhovým momentem a rychlostí. Ve většině případů se závislosti momentu a otáček kotvy na řídicím napětí blíží lineárnímu.
 V závislosti na systému napájení elektrických obvodů se rozlišují hnací motory řízené kotvou a pólové.Při řízení kotvy je řídicím vinutím vinutí kotvy, s nímž je na jeho svorky přiváděno řídicí napětí a konstantní budicí proud poskytuje nezávislý zdroj elektrické energie konstantního napětí. V případě pólového ovládání slouží řídící cívka jako primární pólová budicí cívka a na její svorky je přiváděno řídící napětí a svorkové napětí kotvy nastavené nezávislým zdrojem stejnosměrného napětí zůstává nezměněno.
V závislosti na systému napájení elektrických obvodů se rozlišují hnací motory řízené kotvou a pólové.Při řízení kotvy je řídicím vinutím vinutí kotvy, s nímž je na jeho svorky přiváděno řídicí napětí a konstantní budicí proud poskytuje nezávislý zdroj elektrické energie konstantního napětí. V případě pólového ovládání slouží řídící cívka jako primární pólová budicí cívka a na její svorky je přiváděno řídící napětí a svorkové napětí kotvy nastavené nezávislým zdrojem stejnosměrného napětí zůstává nezměněno.
Obvykle se používá kotevní řízení. Přepólování řídicího napětí způsobí otáčení kotvy v opačném směru.
Výkonné stejnosměrné motory jsou vyráběny s jmenovitým výkonem od zlomku wattu do 600 W normálních a speciálních konstrukcí.
 Motory běžné konstrukce jsou podobné stejnosměrným strojům pro všeobecné použití, ale liší se od nich tím, že rám s hlavními póly je stejně jako kotva sestaven z tenkých plechů z elektrooceli, které jsou od sebe izolované, což zlepšuje vlastnosti těchto strojů v přechodných podmínkách. Navíc v těchto strojích nejsou žádné další póly, protože reakce kotvy je malá a spínací procesy jsou zcela uspokojivé. Protože jsou otáčky kotvy nízké, na hřídeli takových motorů není žádný ventilátor.
Motory běžné konstrukce jsou podobné stejnosměrným strojům pro všeobecné použití, ale liší se od nich tím, že rám s hlavními póly je stejně jako kotva sestaven z tenkých plechů z elektrooceli, které jsou od sebe izolované, což zlepšuje vlastnosti těchto strojů v přechodných podmínkách. Navíc v těchto strojích nejsou žádné další póly, protože reakce kotvy je malá a spínací procesy jsou zcela uspokojivé. Protože jsou otáčky kotvy nízké, na hřídeli takových motorů není žádný ventilátor.
Mezi motory speciální konstrukce patří magnetoelektrické stroje s buzením hlavního magnetického pole pomocí permanentních magnetů a dále stroje s nízkou setrvačností, které se liší konstrukcí kotvy.Mezi posledně jmenované patří: motory s dutou nemagnetickou kotvou - dutý tenkostěnný plastový válec s lisovanou cívkou z měděného drátu s vnitřním pevným feromagnetickým magnetickým obvodem namontovaným na ložiskovém štítu a méně odolné motory s kotoučovou kotvou - a tenký nemagnetický kotouč z keramiky, textolitu, skla a někdy i hliníku s potištěnou cívkou, což je sada měděných fóliových drátů, radiálně umístěných po obou stranách kotouče, po kterých kloužou stříbrno-grafitové kartáčky. se vyznačují nízkým momentem setrvačnosti kotvy, který zajišťuje vysokou rychlost výkonného motoru.

Hmotnost výkonových motorů stejnosměrného proudu je 2-4krát menší než hmotnost výkonných asynchronních motorů se stejným jmenovitým výkonem a jejich účinnost při jmenovitém výkonu 5 ... 10 W je asi 0,3 a dosahuje hodnoty 0,65 a málo vyšší pro motory s jmenovitým výkonem 200 — 300 W.

DC tachogenerátory
 Stejnosměrné tachogenerátory jsou nízkoenergetické stroje určené k převodu mechanické hodnoty na elektrický signál – výstupní napětí. Používají se zejména k řízení a měření otáček hnacího hřídele, na který je připojen hřídel tachogenerátoru, jehož kotvové svorky jsou připojeny k měřicímu zařízení. Kromě toho se tachogenerátory používají v elektromechanických výpočetních zařízeních k provádění výpočetních operací a také v zařízeních pro automatické zpracování generovaných akceleračních a tlumicích signálů.
Stejnosměrné tachogenerátory jsou nízkoenergetické stroje určené k převodu mechanické hodnoty na elektrický signál – výstupní napětí. Používají se zejména k řízení a měření otáček hnacího hřídele, na který je připojen hřídel tachogenerátoru, jehož kotvové svorky jsou připojeny k měřicímu zařízení. Kromě toho se tachogenerátory používají v elektromechanických výpočetních zařízeních k provádění výpočetních operací a také v zařízeních pro automatické zpracování generovaných akceleračních a tlumicích signálů.
Tachogenerátory jsou magnetoelektrické s buzením hlavního magnetického pole pomocí permanentních magnetů a elektrodynamické s elektromagnetickým buzením díky magnetickému poli. budicí cívka napájená nezávislým zdrojem stejnosměrného napětí.
Výstupní napětí tachogenerátoru v klidovém režimu se mění lineárně s otáčkami kotvy a při zatížení je tato linearita poněkud narušena, a to čím více, tím menší odpor má měřicí zařízení připojené ke svorkám kotvy. Přesto je u každého tachogenerátoru relativně malý rozsah měřených otáček, ve kterém lze při dostatečně velkém odporu měřicího zařízení a konstantních podmínkách budícího obvodu považovat výstupní charakteristiku za prakticky lineární.
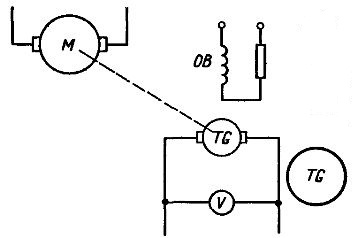
Schéma zapojení stejnosměrného tachogenerátoru nezávislého buzení
 Značnou nevýhodou stejnosměrných tachogenerátorů je kolísání výstupního napětí v důsledku mírné periodické změny magnetického toku v důsledku nerovnoměrné vzduchové mezery a nestejná vodivost kotvy v různých radiálních směrech, včetně těch způsobených strukturou zubu jejího magnetického obvodu, stejně jako v důsledku vibrací kartáčů, drsnosti a elipticity kolektoru a spínacích procesů — z velké části eliminovány u tachogenerátoru s dutou kotvou, který je konstruován stejně jako výkonný stejnosměrný motor s nízkou setrvačností a podobná armatura.
Značnou nevýhodou stejnosměrných tachogenerátorů je kolísání výstupního napětí v důsledku mírné periodické změny magnetického toku v důsledku nerovnoměrné vzduchové mezery a nestejná vodivost kotvy v různých radiálních směrech, včetně těch způsobených strukturou zubu jejího magnetického obvodu, stejně jako v důsledku vibrací kartáčů, drsnosti a elipticity kolektoru a spínacích procesů — z velké části eliminovány u tachogenerátoru s dutou kotvou, který je konstruován stejně jako výkonný stejnosměrný motor s nízkou setrvačností a podobná armatura.
Nepřesnost instalace kartáčků na geometrické neutralitě kolektoru otáčkoměru vede k asymetrii výstupního napětí, tzn.generovat dvě různá napětí ve vinutí kotvy v opačných směrech jeho rotace při stejné rychlosti. Při správném uspořádání kartáčů se napěťová asymetrie pohybuje v rozmezí 0,3 až 1 % jmenovitého napětí tachogenerátoru.