Principy tyristorového a triakového řízení
Začněme s nejjednoduššími schématy. V nejjednodušším případě k ovládání tyristoru stačí krátce přivést konstantní proud o určité hodnotě do jeho řídící elektrody. Mechanismus pro dodávání tohoto proudu lze schematicky znázornit zobrazením spínače, který sepne a dodává energii, jako je výstupní stupeň čipu nebo tranzistoru.
Jedná se o zdánlivě jednoduchou metodu, ale síla řídicího signálu zde musí být významná. Takže za normálních podmínek pro triak KU208 by tento proud měl být alespoň 160 mA a pro trinistor KU201 by měl být alespoň 70 mA. Takže při napětí 12 voltů a průměrném proudu řekněme 115 mA bude nyní řídicí výkon 1,4 W.

Požadavky na polaritu řídicího signálu jsou následující: SCR vyžaduje řídicí napětí, které je kladné vzhledem ke katodě, a triak (symetrický tyristor) vyžaduje stejnou polaritu jako anodový proud, nebo zápornou pro každý z půlcyklů. .
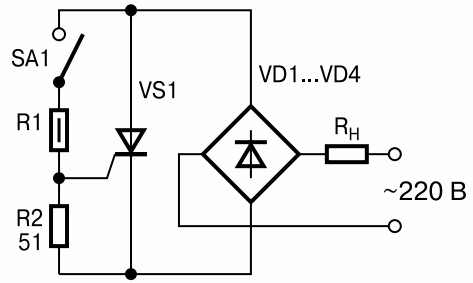
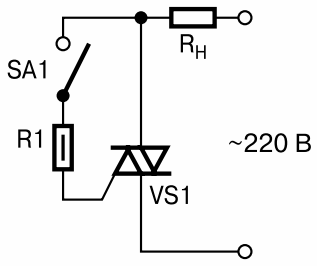
Řídicí elektroda triaku není bočníková, trinistor je ovládán odporem 51 ohmů.Moderní tyristory vyžadují stále menší řídicí proud a velmi často se můžete setkat s obvody, kde je řídicí proud SCR redukován na cca 24 mA, u triaků na 50 mA.
Může se stát, že prudký pokles proudu v řídicím obvodu ovlivní spolehlivost zařízení, takže někdy musí vývojáři volit tyristory zvlášť pro každý obvod. Jinak by pro otevření nízkoproudého tyristoru muselo být jeho anodové napětí v tu chvíli vysoké, což by vedlo ke škodlivému zapínacímu proudu a rušení.
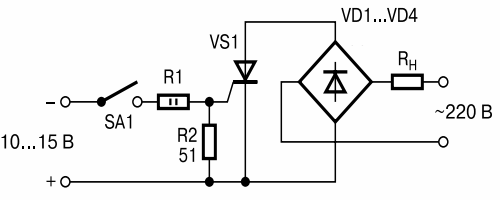
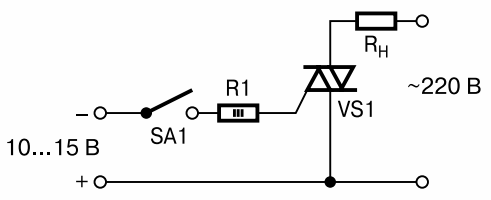
Absence ovládání podle výše popsaného nejjednoduššího schématu je zřejmá: existuje trvalé galvanické spojení ovládacího obvodu s elektrickým obvodem. Triaky v některých obvodech umožňují připojení jedné ze svorek řídicího obvodu k nulovému vodiči. SCR umožňují takové řešení pouze přidáním diodového můstku do zátěžového obvodu.
V důsledku toho je výkon dodávaný do zátěže poloviční, protože napětí je do zátěže přiváděno pouze v jedné z period sinusovky sítě. V praxi se setkáváme se skutečností, že obvody s tyristorovým řízením stejnosměrného proudu bez galvanického oddělení uzlů se téměř nepoužívají, kromě případů, kdy se řízení z nějakého dobrého důvodu musí provádět tímto způsobem.
Běžným řešením tyristorového řízení je napětí přiváděné na hradlovou elektrodu přímo z anody přes odpor sepnutím spínače na několik mikrosekund. Klíčem zde může být vysokonapěťový bipolární tranzistor, malé relé nebo fotorezistor.
Tento přístup je přijatelný při relativně vysokém anodovém napětí, je pohodlný a jednoduchý, i když zátěž obsahuje reaktivní složku. Existuje však také nevýhoda: nejednoznačné požadavky na odpor omezující proud, který musí mít malou nominální hodnotu, takže se tyristor při prvním zapnutí zapne blíže k začátku půlcyklu sinusovky, ne při nulovém síťovém napětí (při absenci synchronizace), může k němu také přijít 310 voltů, ale proud přes spínač a přes řídicí elektrodu tyristoru by pro ně neměl překročit maximální přípustné hodnoty.
Samotný tyristor se otevře na napětí Uop = Iop * Rlim. V důsledku toho dojde k šumu a mírně se sníží napětí zátěže Vypočtený odpor rezistoru Rlim se sníží o hodnotu odporu zátěžového obvodu (včetně jeho indukční složky), který je náhodou zapojen do série rezistoru v okamžiku zapnutí.
Ale u topných zařízení se počítá s tím, že ve studeném stavu je jejich odpor desetkrát menší než v pracovním vyhřívaném. Mimochodem, vzhledem k tomu, že u triaků se zapínací proud pro kladné a záporné půlvlny může mírně lišit, může se na zátěži objevit malá konstantní složka.

Doba zapnutí SCR obvykle není delší než 10 μs, proto pro ekonomickou regulaci výkonu zátěže lze pro frekvence 20, 10 a 5 použít sled pulzů s pracovním cyklem 5, 10 nebo 20. kHz, resp. Výkon se sníží 5krát až 20krát.
Nevýhoda je následující: tyristor se může zapnout, a ne na začátku půlcyklu.Je plná vln a hluku. A přesto, i když k zapnutí dojde těsně před začátkem nárůstu napětí z nuly, v tomto okamžiku proud řídicí elektrody ještě nemusí dosáhnout udržovací hodnoty, pak se tyristor vypne ihned po skončení puls.
V důsledku toho se tyristor bude nejprve zapínat a vypínat na krátké intervaly, až nakonec proud nabude sinusového tvaru. U zátěží s indukční složkou nemusí proud dosáhnout udržovací hodnoty, což ukládá spodní hranici trvání řídicích impulsů a spotřeba energie se příliš nesníží.
Oddělení řídicího obvodu od sítě je zajištěno tzv. impulsním startem, který lze snadno provést instalací malého izolačního transformátoru na feritový kroužek o průměru menším než 2 cm. Důležité je, aby izolační napětí takového transformátoru by měl být vysoký, a ne jen jako jakýkoli průmyslový pulzní transformátor...
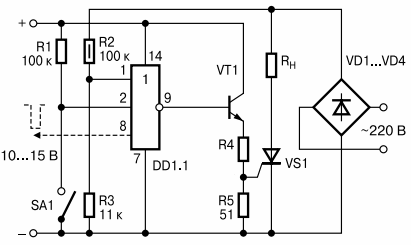
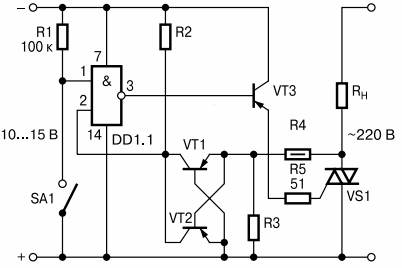
Aby se výrazně snížil výkon potřebný k ovládání, bude nutné sáhnout k přesnějšímu řízení. Proud hradla musí být vypnut stejně jako je zapnutý tyristor. Když je spínač sepnutý, tyristor se zapne, a když tyristor začne vést proud, mikroobvod přestane dodávat proud přes řídicí elektrodu.
Tento přístup skutečně šetří energii potřebnou k pohonu tyristoru. Pokud je spínač aktuálně sepnutý, anodové napětí stále nestačí, tyristor se mikroobvodem neotevře (napětí by mělo být mírně vyšší než polovina napájecího napětí mikroobvodu). Spínací napětí je nastavitelné výběr oddělovacích odporů.
Pro ovládání triaku tímto způsobem je nutné sledovat polaritu, takže do obvodu je přidán blok dvojice tranzistorů a tří rezistorů, který zafixuje okamžik, kdy napětí překročí nulu. Složitější schémata jsou nad rámec tohoto článku.